欧洲自动转移飞行器电源系统设计及启示
2014-12-28 05:45
航天器工程 2014年6期
(北京空间飞行器总体设计部,北京 100094)
1 引言
目前,为“国际空间站”输送货物的货运飞船包括俄罗斯研制的进步号货运飞船,欧洲研制的自动转移飞行器(Automated Transfer Vehicle,ATV),美国研制的货运型乘员探索飞行器(Crew Exploration Vehicle,CEV),日本研制的H-ⅡB转移飞行器(HTV)。进步号货运飞船采用两个太阳翼、两组蓄电池组设计,其运行,尤其是对接段受太阳入射角的约束;CEV 和HTV 完全采用蓄电池组储能作为能源,其持续工作时间小于10h;所有的这些货运飞船中以ATV 的电源系统最为复杂、先进、完善。我国正在开展货运飞船和空间站的相关研究工作,针对ATV 的电源系统开展研究,对于指导我国货运飞船和交会对接类航天器电源系统设计具有重要的借鉴意义。
以货运飞船为代表的交会对接类航天器电源系统研制的关键技术包括:太阳翼构型设计、太阳翼在遮挡情况下的输出功率均衡管理,以及蓄电池组的在轨充电管理。太阳翼构型设计的目的是在较大太阳入射角的条件下,保证太阳翼的输出功率均衡;遮挡适应设计的目标是确保太阳翼在受到遮挡影响时,各供电母线输出功率稳定;蓄电池组的充电管理是确保蓄电池组寿命和性能的重要技术。ATV 在这3个技术难点上均有自己独特的设计,能有效解决实际问题,具有重要的借鉴意义。ATV 采用太阳翼X 构型设计,平衡不同光照条件输出功率;采用太阳电池电路交叉布阵,降低遮挡对每个太阳电池阵输出功率的影响;采用蓄电池组3种充电控制模式,确保蓄电池性能安全可靠。
本文结合ATV 电源系统设计方案和拓扑结构,对其关键技术开展研究,重点对太阳翼X 构型设计,太阳电池电路交叉布阵,蓄电池组充电控制模式的特点进行分析。最后,论述了ATV 电源系统设计对我国航天器特别是货运飞船电源设计的启示,着重分析了采用这些设计的优缺点。
2 ATV 电源系统设计
ATV 由阿里安-5 火箭(ARIANE-5)发射,重20t,为“国际空间站”(ISS)运送货物。它与俄罗斯舱段对接,为ISS提供轨道机动和姿态控制,主要运送推进剂、水、气和其它固体货物[1]。
ATV 主要任务包括:
(1)由阿里安火箭发射进入轨道;
(2)展开太阳翼;
(3)进行相位调整与ISS同步运行2~4天;
(4)与俄罗斯舱段进行交会对接并停泊;
(5)作为ISS的一部分,进行长达6个月的长期留轨运行,并可为ISS进行货物输送。大部分时间工作在休眠模式,短时为工作模式,工作时将货物运送入ISS,同时将ISS不用的物品卸下,并为俄罗斯舱段加注推进剂,保证ISS的轨道机动和姿态控制;
(6)与ISS分离并独自运行;
(7)返回进入大气层烧毁。
ATV 与ISS分离后,可在ISS附近的停留轨道运行最多8个星期,然后再重新与ISS对接,继续执行任务[2]。
ATV 轨道高度约为400km,周期90min,地影时间0 到36 min。太阳电池阵在光照期为负载供电,同时给蓄电池充电;蓄电池组在地影期为负载供电。ATV 用电负荷范围为1500~2300 W[3],在对接状态下,由ISS为ATV 提供补充电能,休眠状态下提供400 W,工作状态下提供900 W。电源系统能够适应短时失去空间站提供的补充能源带来的影响。
ATV 电源系统由主电源系统(4个太阳电池阵、4组蓄电池、4台电源控制分配单元(PCDU)、辅助电源(LiMnO2电池组)、隔离型ISS功率调节器构成。
2.1 ATV 的电源拓扑结构
ATV 的电源系统采用4条相互独立的供电母线,每一条母线都有自己独立的PCDU。每条母线由1台PCDU、1组镉镍蓄电池、8个太阳电池电路构成一个独立供电机组(见图1)。
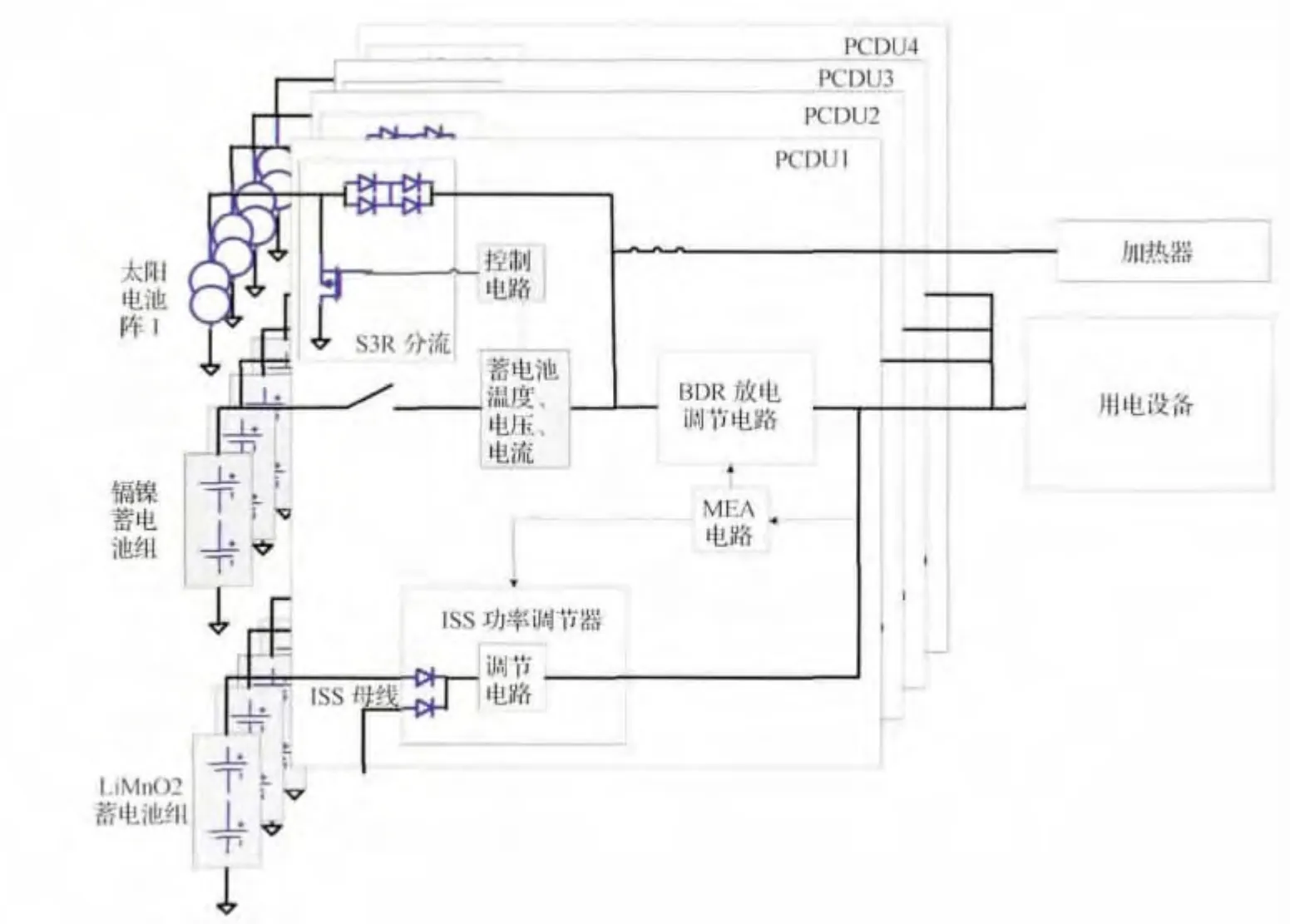
图1 ATV 电源系统拓扑结构Fig.1 ATV power supply architecture
1)蓄电池组
选用4组SAFT 公司提供的40Ah 镉镍蓄电池组(工作电压36~55V),每组36个单体,分为两个结构模块,每组电池重约74kg。
2)太阳翼
每个太阳电池阵输出电压56.5V,功率1155 W(在太阳翼驱动机构处),要求太阳翼的设计面积在经过辐照和环境因素影响性能衰退的情况下,在寿命末期夏至点仍满足飞船的电能需求。太阳翼可以在短期较大的太阳入射角和ISS的遮挡下正常工作,能够提供充足的电能,满足飞行器和载荷整个任务期间的需求(6个月的在轨时间,包括自由飞行和对接模式)。[4]
3)PCDU
PCDU 把功率调节、保护和配电所需的控制电路和功率电路都集成在一台单机内。PCDU 包含有2套控制电路:一是28V 调节母线电压的稳压控制电路(包含蓄电池组放电调节电路和隔离型ISS功率调节器),二是蓄电池组的充电控制电路。蓄电池组放电调节电路选用的是串联降压BUCK 模块电路,采用跨导控制。ISS功率调节器接收由ISS 母线或辅助蓄电池组送来的电能,经隔离变换后并入ATV 电源母线。蓄电池组充电控制电路通过S3R对太阳电池阵的充电电流进行控制。
出于继承性考虑,PCDU 中的所有功率变换模块都是基于伽利略卫星电子系统(Galileo Avionica)的技术,模块化设计的产品[5]。
PCDU 的组成部分包括:
(1)由主误差放大器控制的一个1200 W 的蓄电池组放电调节器和一个300 W 的ISS功率调节器,实现2域控制,将母线电压稳定在28V±1%范围内;
(2)S3R;
(3)用于控制S3R 和蓄电池组充电的电池组充电控制信号;
(4)直接由太阳电池和蓄电池组供电的不调节母线给加热片供电,4路非稳压输出,带固态功率控制器(Solid State Power Controller,SSPC)保护,为加热器供电;
(5)20路稳压输出,带SSPC保护;
(6)充电控制电路,对蓄电池组进行充电控制,防止过充电。
4)母线调节
采用经典的三取二的主误差放大器产生主误差信号,以驱动蓄电池组放电调节电路,获取稳定的28V 母线电压。另外,采用两域控制来管理ISS母线和辅助蓄电池组的供电并进行调节。在主母线上设置3000μF 的电容阵,由PM90型可自愈电容组成,以稳定母线电压并滤除纹波。[6]
采用S3R 分流技术作为蓄电池组的充电控制,采用多级开关分流和一级脉宽调制(PWM)控制,并能实现涓流充电。实际电路设计中采用了8 级PWM 电路设计。
BDR 采用降压BUCK 电路,每个调节模块包含两个BUCK 电路,具有效率高,散热好的优点。2个模块的工作相位差为180°,以保证输出纹波最小。
2.2 ATV 电源系统的关键技术
2.2.1 太阳翼的构型设计
ATV 电源分系统是由4个太阳翼构成的可展开式太阳电池阵,太阳翼的构型为X 型,相邻两组太阳翼之间的夹角为44°。采取这种设计,主要为了保证太阳电池阵能够在太阳入射β角(太阳光与轨道面的夹角)在±75°范围内变化时,太阳电池阵的输出功率比较均衡。如图2所示。每个太阳翼由4块1820mm×1150mm(2.09m2)的基板构成,每翼面积为8.36m2。
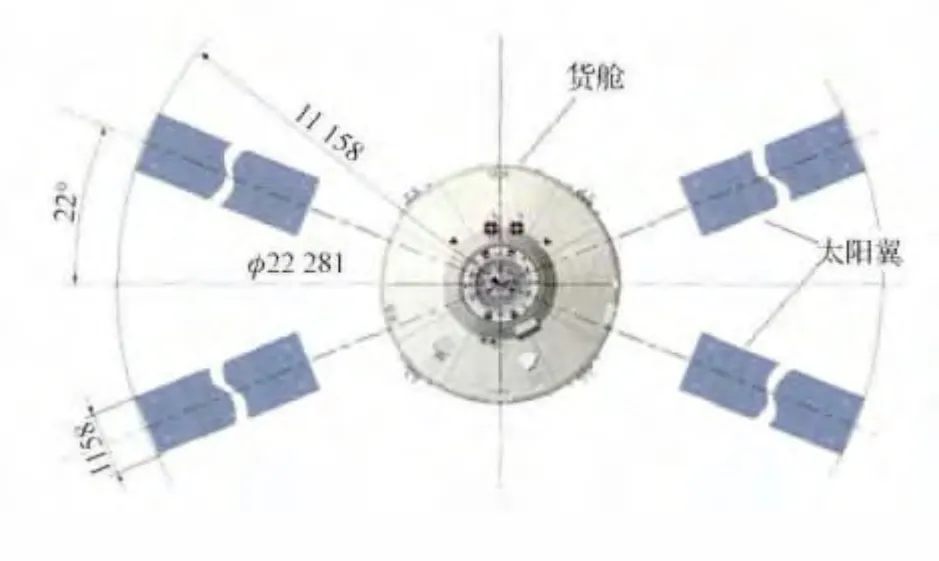
图2 ATV 太阳翼布局图Fig.2 Solar array arrangement of ATV
2.2.2 太阳电池电路布局设计
太阳翼在光照条件下,太阳电池电路的工作点电压被钳位在蓄电池组电压;在寿命末期,其工作电压为57.5V,在工作温度为61℃,太阳光直射下,每翼能输出1200 W 功率。由于受到太阳光入射角和ATV 自身舱体以及ISS空间站的遮挡影响,太阳电池阵每天平均输出功率在800~3800 W 之间变化。
ATV 的太阳电池阵有4个太阳翼,每个电池翼有4块基板,每块基板上布有2个太阳电池电路,共计32个太阳电池电路。这32个太阳电池电路按照“交叉连接”的方式连接至各个PCDU,如图3所示。每块基板上的太阳电池电路只给一台PCDU 供电,每台PCDU 与来自不同太阳翼不同位置的4 块太阳电池板上的8 个太阳电池电路组成一个供电机组,这样设计的目的,是为了平衡不同光照条件和遮挡下各太阳电池阵的输出功率。
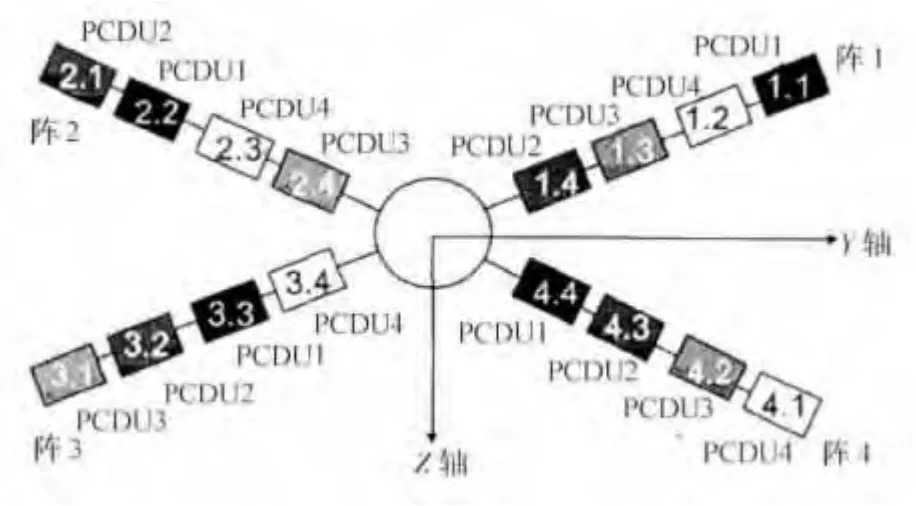
图3 太阳电池阵与PCDU 对应布局图Fig.3 Solar sections to PCDU allocation
图3中各电池阵每个太阳电池板与4台PCDU的连接关系见表1。

表1 各太阳电池板与PCDU 对应连接情况Table 1 Connections of solar panels and PCDU
太阳电池电路设计:
(1)选用硅太阳电池,64.00 mm×35.60 mm,厚200μm。太阳电池裸片通过了相关测试、试验验证考核;
(2)互连焊接采用镀银的钼引线,能够适应原子氧环境;
(3)为了保护整个正面免受原子氧侵蚀的影响,使用了一层硅粘合剂(RTV-S691)。这层粘合剂既能保证机械连接强度,又能起到保护作用;
(4)每个硅电池片采用三根互联引线连接,确保冗余;
(5)基板的背面全部涂敷白硅漆,既防止原子氧侵蚀,又可以降低其工作温度;
(6)选用适当的布线,保证相邻两片电池间的电压差最小,确保出地影的峰值电压差小于30V;
(7)采用太阳电池串对称布局,以补偿磁力矩,确保磁力矩最小;
(8)结合太阳电池板正面电池串布局,进行电池板背面布线设计,确保每个电路回路的面积最小。
2.2.3 蓄电池组充电控制
蓄电池组的充电控制是在母线稳压调节控制的基础上实现的,由太阳电池阵和蓄电池组控制电路完成,见图4。这一电压控制电路的设计需要考虑系统级的安全充电策略。
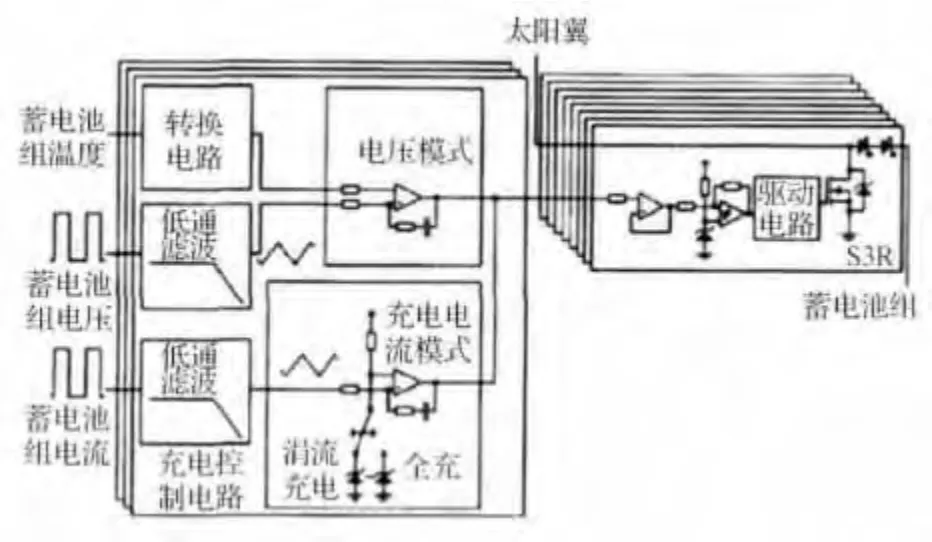
图4 太阳电池阵和蓄电池组控制电路Fig.4 Solar array &rechargeable battery control circuit
太阳电池阵和蓄电池组控制电路的控制逻辑由充电电流、电压和电池组温度共同控制。这两个控制回路都是三模备份的,并且电流采样电路、电压采样电路和温度测量电路都有备份。产生的三路信号经过解耦后再通过三取二表决电路产生电池组充电控制信号,控制S3R 工作。同时,太阳电池阵和蓄电池组控制电路还将采集的蓄电池组的充电电流、电压和温度,用于状态监测。
1)全充电模式
当PCDU 上电时,蓄电池组充电控制自动启动进入全充电模式。在这种模式下,对充电电流不作限制,因此它是太阳电池阵的最大输出电流(对于8个太阳电池电路就是24A)与负载所消耗的电流的差值,也就是说全部分流级都处于不分流状态。S3R 首先保证BDR 的输入所需电流,以满足负载设备的供电需求,其余的电流全部用于蓄电池组充电,如图5所示。当工作在涓流充电模式时,一旦检测到蓄电池电压低于47V,PCDU 就会自动转为全充电模式,该自动转换电路也是三模冗余的。
2)恒压充电模式
当蓄电池组的电压被充电至预设的电压门限时,自动转为恒压充电模式。此时蓄电池组的电压应是在电压控制点上下波动的,波动范围在0.5V以内,它是一个太阳电池电路的输出电流(3A)与蓄电池组内阻(150 mΩ)的乘积。该纹波的频率由S3R 的开关频率决定。在正常工作时,S3R 的最大频率为300Hz。在故障模式时(即蓄电池组开路),S3R 的最大频率为1250Hz。在进行模块结构设计时要考虑到后者,此时开关频率增大时热耗更大。
3)涓流充电模式
通过1553B 总线指令,可以转涓流充电模式。在该模式下,对于40Ah 的蓄电池组,涓流电流最大不应超过C/100,因此设置为300mA±100mA,该电流为是平均电流,开关频率控制额定值为1kHz。[7]
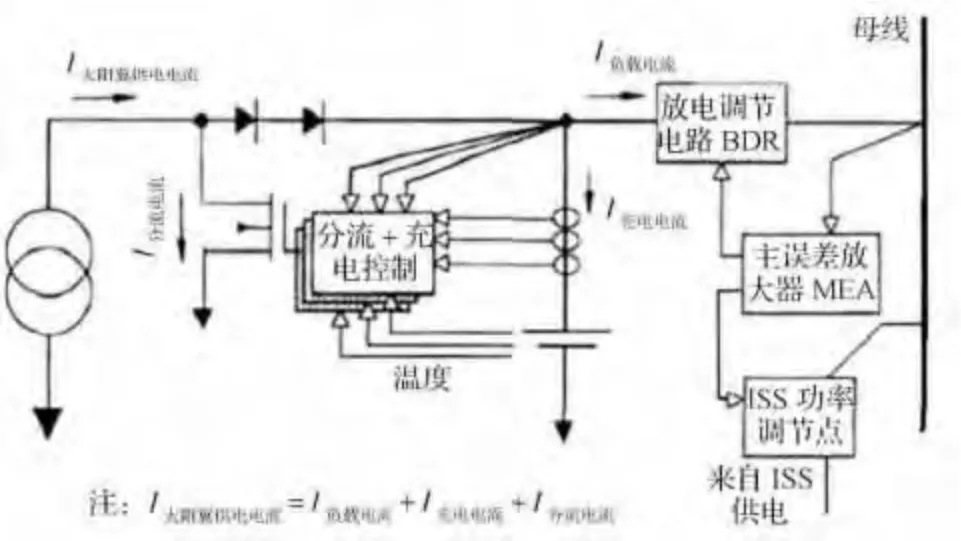
图5 太阳电池阵和蓄电池组控制Fig.5 Solar array &rechargeable battery management
3 ATV 电源设计的启示
1)太阳翼X 构型设计的优势
ATV 电源分系统太阳翼采用X 构型设计,是一种在太阳翼的太阳入射角β在±75°范围内变化时,保证太阳翼的功率输出均衡的全新的设计。以往解决较大太阳入射角对太阳翼输出功率的影响,通常采用双轴太阳电池阵驱动机构(solar array drive assembly,SADA)的方案,然而对于有交会对接需求和较大轨道机动需求的航天器,任务通常要求不能选用双轴SADA,则需要考虑采用X 构型的太阳翼设计。相邻两太阳翼间的夹角选择与太阳入射角β密切相关,根据太阳入射角β的大小,选择相邻太阳翼间的最佳夹角。太阳翼X 构型设计,可以很好地适应倾斜轨道太阳入射角大范围变化时其输出功率的平衡需求,可以保证太阳光与每个太阳翼的夹角变化范围最小。其缺点是系统相对比较复杂,需要采用4个太阳翼,4套SADA 系统。
2)太阳电池电路交叉布局
对于运行过程中太阳翼受到遮挡,无法通过姿态机动消除遮挡的航天器,如ISS,如何保证不同发电机组或供电母线之间的输出功率的平衡,对于维持电源系统稳定工作是非常重要的。ATV 太阳翼受到自身舱体以及ISS空间站的遮挡影响,为了平衡不同光照和遮挡条件下各太阳翼的输出功率,每台PCDU 单元与来自不同太阳翼不同位置的太阳电池板上的太阳电池电路组成一个供电机组供电。这种不同位置太阳电池电路交叉连接设计方式,可以有效平衡各供电母线的输出功率,保证各用电负载的稳定工作,这种设计对于空间站太阳电池阵的布阵设计,避免自身遮挡带来的影响也同样具有重要的指导意义。
3)蓄电池组充电管理
国内低轨航天器,通常采用一阶段限流充电结合二阶段涓流充电的充电控制模式,相比较之下,ATV 采用了前期全充电,结合恒压充电控制和涓流充电三种模式,既可以克服恒压或恒流充电时间过长的缺点,满足低轨道航天器蓄电池快速充电实现能量平衡需求,又可以适应具有全光照期的特殊轨道在全光照时蓄电池组的管理需要。采用恒压充电控制管理可以有效提高蓄电池在轨充电效果,其充电过程更接近于最佳充电曲线,使蓄电池组达到最佳充电效果。
采用这三种充电控制模式相结合管理模式,既可以充分利用太阳电池阵的输出功率给蓄电池组充电,同时恒压充电模式和涓流充电模式的引入,也可以保证蓄电池组处于最佳充电状态,有利于蓄电池的可靠使用,延长蓄电池在轨循环寿命。其缺点是充电模式较多,充电管理较为复杂。
4 结束语
ATV 电源系统继承了伽利略卫星电子系统(Galileo Avionica)的部分成熟技术,采用模块化设计,两域调节,蓄电池充电控制具备全充电、恒压充电、涓流充电3种模式。其中太阳翼采用X 构型布局,电源调节配电单元与太阳电池电路连接采用交叉布局设计,可以有效避免太阳翼受遮挡或较大太阳入射角变化带来的影响,对于我国轨道机动航天器和交会对接飞行器电源系统的设计具有重要的借鉴意义。
(References)
[1]J Y Heloret,P Amadieu.The European Automated Transfer Vehicle-an overview[C]//50thIAF Congress.Paris:IAF,1999:1-5
[2]J Y Heloret,G Debas.Overview of the development of the European Automated Transfer Vehicle[C]//53rdInternational Astronautical Congress.Texas:IAC,2002:1-23
[3]P Casiez,A Joulot,L Rochas.Overview of the electrical and thermal power management of ATV[C]//52th IAF Congress.Paris:IAF,2001:1-11
[4]E Ferrando,L Brambilla,R Contini.The electrical part of the solar generator of Automated Transfer Vehicle solar array[C]//3rdWorld Conference on Photovoltaic Energy Conversion.Osaka:WCPEC,2003:813-816
[5]Craig S Clark,Alan H Weinberg.The design and performance of a power system for the Galileo system test bed GSTB-V2A[C]//7thEuropean Space Power Con-ference.Paris:ESA,2005:589
[6]Antonio Ciccolella,Thierry Blancquaert.Power interface characterisation between the Russina service module and the ESA Automated Transfer Vehicle[C]//6th European Space Power Conference(ESPC).Paris:ESA,2002:1-6
[7]A Polli,A Antimiani,M Magnifico.Power conditioning and distribution unit for Automated Transfer Vehicle[C]//6th European Space Power Conference(ESPC).Paris:ESA,2002:1-8
猜你喜欢
太阳能(2022年2期)2022-03-07
北京航空航天大学学报(2021年7期)2021-08-13
上海航天(2020年3期)2020-07-01
装备环境工程(2018年7期)2018-08-01
北京航空航天大学学报(2017年7期)2017-11-24
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
军民两用技术与产品(2016年3期)2016-01-05