
改进人工势场法在无人车避障中的应用*
2014-12-26 03:34:48谭宝成崔佳超
西安工业大学学报 2014年12期
谭宝成,崔佳超
(西安工业大学 电子信息工程学院,西安710021)
目前,无人驾驶技术在智能车领域中是国内外的研究的重点课题,其中避障算法是研究对象中的热点和难点,并且在国内外都取得一定的成果,常用的避障算法有:人工势场法[1-3]、遗传算法[4]、栅格法、蚁群算法[5-6]等.遗传算法的收敛速度和收敛效率不但决定于种群的数量,而且也受到交叉概率和变异概率的影响;蚁群算法的搜素最优路径的时间长短受到蚁群数量和外界环境障碍物的数量影响.人工势场法是由Khatb提出的一种虚拟力法,与遗传算法和蚁群算法相比,其优点为算法简明,实时性良好,规划路径轨迹圆滑,适合无人驾驶智能车领域.但存在容易进入局部最小点,导致不能达到目标点问题[7].为了解决这一问题,大量学者展开研究,于振中[8]等人提出了添加填平势场法.石为人[9]等人研究了连接区域障碍物法来避免局部最小点给系统造成的影响.但在结构化高速公路环境下,这些方法存在以下问题:① 斥力场范围过大,无人车在非碰撞路径上会受到其它路径上的斥力场作用;② 斥力场范围过小,无人车避障时存在角度跳变大.这些问题限制了以上方法在结构化道路环境中的应用.
针对人工势场法在结构化高速公路环境应用的难题,本文通过建立汽车拐弯模型,分析人工势场模型,提出改变势场作用范围建立新的人工势场模型.通过对障碍物进行分类,改造障碍物虚拟排斥力的作用条件,生成动态障碍物与虚拟引力势场,提出了改进人工势场避障算法,以期实现智能车在结构化高速公路环境中小角度、大半径避障.
1 无人驾驶车辆拐弯模型
无人驾驶车辆拐弯模型如图1所示,给定车体前轮一个角度,则车体以速度v围绕圆心O以一定半径d做匀速圆弧运动,时间t内车的质心走过的弧长记为S,圆心角为β,车辆的轮胎与中心轴的夹角问为a,中心轴长度为L,悬臂长为l,则车体避障时满足关系式为


图1 无人驾驶车辆拐弯模型Fig.1 The mode of unmanned vehicle in turning conditions
无人驾驶智能车车体模型如图2所示,INF1、INF2、INF3为红外测距传感器,主要测量车辆侧向和后向的的障碍物距离,GPS通过卫星可获得车辆的地球坐标和航向,在没有障碍物的情况下,车辆可以以按照预先规划好的路径进行行驶,LADAR为激光雷达,扫描角度为180°,扫描距离为200m,通过与图像传感器CCD的数据融合,可获得前方障碍物的极坐标(ρ,θ),在忽略障碍物的高度情况下,以激光雷达为原点的局部直角坐标系中,障碍物坐标为(xo,yo),其中xo=ρ×cosθ,yo=ρ×sinθ,将障碍物的局部坐标转换为大地坐标(Xo,Yo)为

式中:Xc,Yc为无人车在地球坐标系中的坐标;ψ为无人车辆的航向.

图2 无人车车体模型Fig.2 Unmanned vehicle body model
2 人工势场分析与改进策略
文中在传统人工势场上进行改进,将传统的障碍物圆形作用区域改造成高速公路环境下的长方形作用区域,然后给出虚拟动态目标点,在障碍物和虚拟目标点的共同作用下规划车辆的运动方向.
传统的障碍物的虚拟力场如图3所示,以障碍物的的中心为原点,半径为r的圆所包含的范围为虚拟力场,不同的虚拟力场半径r在结构化高速公路中影响车辆的避障路径的规划,障碍物OBSTACLE的虚拟力场作用半径r取的过小,车辆没有足够的避障距离,从而导致车辆在小距离的危险避障环境中出现大角度,快速的降低速度进行避障;如果障碍物虚拟力场作用半径r取的过大可以让无人驾驶车辆提前进行避障区域,但是大范围的斥力场覆盖高速公路中的无碰路径点,在无碰路径点无人车会进行没有必要的方向调节,这不符合人类的驾驶习惯,也会给其他车辆的安全行驶带来隐患.
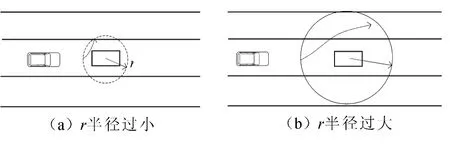
图3 传统人工势场模型Fig.3 Traditional artificial potential field model
如果将势场作用区域进行划份,让无人车行驶方向上的势场作用距离较大,使无人车提前进行修正方向,进行避障;让无人车行驶方向垂直方向上的势场作用距离较小,使无人车快速逃出避障区域.改进后的人工势场可以使无人车进行小角度平稳进行路径规划,在无碰区域也不会出现没必要的方向调节.改造后的势场作用域模型如图4所示,在Y轴方向上,无人车受到障碍物的虚拟势场的最小距离为D;在X轴方向上,无人车多受到的障碍物的虚拟势场距离为d.
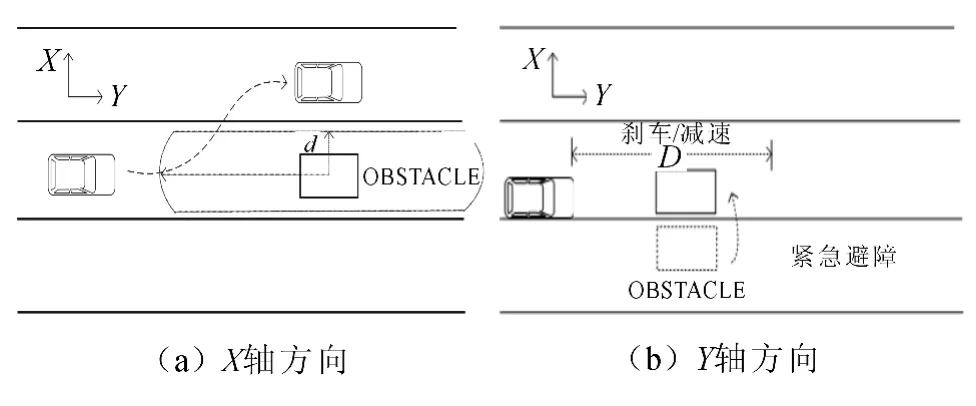
图4 改进后的人工势场模型Fig.4 The improved artificial potential field model
3 改进人工势场避障算法
3.1 区分障碍物
根据无人车行驶时,无人车与障碍物的距离,将障碍物分为需紧急避障的障碍物和安全避障的障碍物.需紧急避障的障碍物是指无人车突然发现前方车辆正从其它车道侧向驶向智能车所在的无障碍车道时,并且满足无人车和驶入车辆实际距离小于经过计算处理安全避障距离D,此时应该进行紧急避障,紧急避障的方法是减速或者刹车.如果智能人车的实际距离大于经过计算处理安全避障距离D,将其视为安全避障车辆.安全避障的方法采取改进后的人工势场.最终确保智能车安全脱离障碍物.根据无人车行驶时遇到的两类的障碍物决策无人车采取变向避障还是减速避障.
3.2 计算安全避障距离
遇到前方障碍物时,无人驾驶车辆通过调节前轮与车轴的夹角a进行避障,最大夹角a决定了无人车的最小拐弯半径和Y轴方向的安全避障距离Do[10],Do和角度a的关系为

其中Dx为无人车避障时在X方向上的安全距离.
无人车辆正常进行路径规划时,非紧急情况下,方向转角不能总是以最大的角度进行避障,这也符合人类驾驶习惯,所以避障据离Do应该考虑到无人车速度vc和障碍物与无人车的相对速度的vR的约束,则避障距离D的修正公式为

式中:ζ为修正因子,取1~1.5.
当vR>0时,说明无人车的速度小于障碍物的速度,无人车和障碍物的距离在逐渐变大,此时避障距离D=0,当vR<0时,无人车速度大于障碍物速度,此时无人车和障碍物之间的距离正在缩小,因此可得

3.3 生成虚拟目标点
无人车在预设路经上行驶时,遇到障碍物,脱离预设路径,进行避障,此时系统在安全车道上生成局部虚拟目标点,牵引无人车辆脱驶向安全区域,如图4所示,局部虚拟目标点在无障碍物安全区域的路径中央,目标点相对于无人车的Y轴方向距离为D+H/2.
3.4 建立引力势函数与斥力势函数
当确定了人工势场作用域后,进而可以对人工势场在结构化道路环境下的模型进行改造,当无人车遇到障碍物时,虚拟目标点是系统根据安全需要自动生成,虚拟目标点的作用范围是全局的,属于静态目标点,因此,目标点的引力势函数为
我感觉,梁实秋先生这段接地气的话,把“自控力”这个原本抽象的概念,很通俗易懂地表达了出来:克制,是为了更好的自己。

式中:Ka为引力势场常量;Qc为无人车地球坐标系位置向量;Qg为地球坐标系中目标点的位置向量.
该引力场对无人车产生的引力为引力势能的负梯度,得到引力公式为

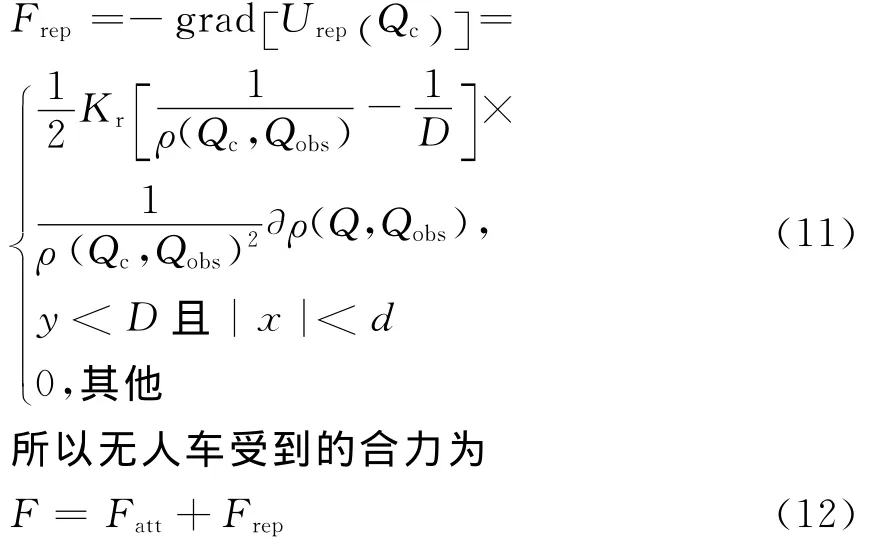
在行驶过程中,无人车的行驶方向为无人车局部坐标的Y轴,无人车通过自身传感器获得障碍物的位置信息和速度信息,在第k时刻,无人车行驶方向道路上无障碍车辆,在k+1时刻,无人车发现前方障碍物车辆,即障碍物在局部坐标中的横坐标满足|x|<d,无人车检检测到行驶方向的车辆的实际Y轴距离大于计算出的安全距离D,无人车行驶到距障碍物距离为D处开始进行避障,则安全避障的斥力函数的最大范围为D,这种情况下的斥力场函数改进为


对斥力场函数求负梯度得到安全避障时无人车所受到的斥力函数为
在目标点的虚拟引力场和障碍车辆的虚拟斥力场的共同作用条件下,智能车避开障碍物,趋向目标点,最中达到避障.F的向量大小控制车的速度,F的方向控制真能车的避障方向盘角度.
如果在行驶过程中,遇到紧急障碍物,在k+1时刻,无人车发现前方障碍物车辆,并且计算获得安全避障距离大于无人车与障碍物的实际距离,不足够势场法避障条件,应该立即进行减速或者制动刹车等控制决策.
3.5 无人车航向角计算
在地球坐标系中,假设无人车的坐标Qc(xc,yc),虚拟目标点坐标Qg(xg,yg),第i个障碍物的坐标为Qci(xci,yci),则无人车与目标点的夹角θg,与第i个障碍物的夹角θoi计算为

由引力势场与斥力场合力所决定的无人车的航向角为

其中n为障碍物总数.
4 仿真分析
人工势场的避障模型仿真采用VB6.0,图5为传统人工势场的避障模型,用红色圆圈区域分别为5个动态障碍物obs的斥力范围,绿色线条为无人车避障路径,红色点为目标点,在传统模型中,无碰路径上A车道也存在障碍物的斥力场,不必要的障碍物斥力范围相互叠加,作用于无人车,让无人车进行不必要的避障策略;图6为改进后的人工势场避障模型,智能车根据自身速度结合与障碍物的相对速度计算出不同障碍物的最大安全避障距离D,延无人车行驶方向的X轴上,斥力场的作用距离为D=50m,垂直与车道的Y轴上的斥力肠作用距离为d=20m,智能车在B道上受到收到障碍物与目标点的势力场的和的作用驶入A车道,d>20m时,只受目标点的引力场作用,从而避免了不必要的障碍物的斥力场的作用.

图5 传统人工势场避障模型输出Fig.5 Avoidance model simulation of traditional artificial potential field
为了对比传统方法与改进后的势场法在无人车避障中的角度的变得化率大小,文中在VB仿真中将避障中无人车调节航向的直线斜率记录在text文件中,再运用Matlab的绘图函数将数据绘制成避障时刻T与斜率的二维图,如图7所示,其中横坐标步数表示第几个时间T,纵坐标表示在时间T时刻智能车的调节方向直线的斜率.绿色线条为传统避障的数据,黑色线条为改进后的避障数据,通过途中数据可知,传统避障模式中角度调节变化较大,调节时间较长;改进后的避障模型中,角度变化缓慢,跳变较小,无人车脱离斥力场快.

图6 改进后的人工势场避障模型输出Fig.6 Avoidance model simulation of improved artificial potential field

图7 斜率对照图Fig.7 Comparison of slope
5 结 论
文中通过改造传统障碍物斥力场的圆形作用域,调节障碍物势场作用范围,对传统人工势场法进行了改进.通过仿真得出结论为
1)采用改进人工势场法避障算法,可以使无人车在斥力场的作用下提前进行小角度避障控制调节,在无碰路径上不受其他障碍物的斥力场的作用.避障过程角度变化缓慢,跳变较小,无人车脱离斥力场作用域快,可以用于实时性要求较高的结构化道路环境中.
2)通过改进人工势场法避障算法仿真,结果表明改进人工势场避障算法运行时间短,实时性好,可以适应结构化道路高速避障环境.
[1] KHATIB O.Real Time Obstacle Avoidance for Manipulators and Mobile Robots[J].International Journal of Robotics and Research,1986,5(1):90.
[2] PARK M,JEON J,LEE M.Obstacle Avoidance for Mobile Robots Using Artificial Potential Field Approach with Simulated Annealing[C]//Proceedings of the 2001IEEE International Symposium on Industrial Electronics.Pusan:Institute of Electrical and E-lectronics Engineers,2001:1530.
[3] KITAMURA Y,TANAKA T,KISHINO F,et al.3-D Path Planning in a Dynamic Environment Using an Octree and an Artificial Potential Field[C]//Proceedings of the 1955IEEE International Conference on Intelligent Robots and Systems.Piscataway:IEEE,1995:2474.
[4] 李晋.基于蚁群算法和遗传算法的机器人路径规划研究[D].哈尔滨:哈尔滨工业大学,2012.LI Jin.Robot Path Planning Research Based on Ant Colony and Genetic Algorithm[D].Harbin:Harbin Institute of Technology,2012.(in Chinese)
[5] 刘世聪.机器人算法研究[D].大庆:东北石油大学,2011.LIU Shi-cong.Research on Robot Obstacle Avoidance Algorithm[D].Daqing:Northeast Petroleum University,2011.(in Chinese)
[6] 赖智铭,郭躬德.基于自适应阈值蚁群算法的路径规划算法[J].计算机系统应用,2014,23(2):113.LAN Zhi-ming,GUO Gong-de.Ant Colony Optimization Based on Self-Adption Threshold for Path Planning[J].Computer Systems & Applications,2014,23(2):113.(in Chinese)
[7] LEE J,NAM Y Y,HONG S J.Random Force Based Algorithm for Local Minima Secape of Potential Filed Method[C]//11th Internationl Conferece on Control Automation Robotics & Vision.Singapore:Nanyang Technological University,2010:827.
[8] 于振中,闫继宏.改进人工势场法的移动机器人路径规划[J].哈尔滨工业大学学报,2011,43(1):50.ference on Systems,Wasington:Man and Cybernetics,2003,3:2231.
[11] 张剑明,田魁岳.基于 Matlab/Simulink的液压伺服系统动态性能仿真研究[J].工程机械,2007,44(4):57.ZHANG Jian-ming,TIAN Kui-yue.Simulation Research on Dynamic Performances of a Hydraulic Servo System Based on Matlab/Simulink[J].Construction Machinery and Equipment,2007,44(4):57.(in Chinese)
[12] 韩京清,王学军.非线性PID控制器在机械手控制中的应用[C]//1993中国控制与决策学术年会论文集,沈阳:东北大学,1993:12.HAN Jing-qing,WANG Xue-jun.The Application of Nonlinear PID Controller in Manipulator Control[C]//1993Chinese Control and Decision Making Academic Essays, Shengyang: Northeastern University,1993:12.(in Chinese)
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:12:58
高技术通讯(2021年5期)2021-07-16 07:20:42
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
石油地球物理勘探(2017年4期)2017-12-18 07:15:06
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
系统工程与电子技术(2016年4期)2016-08-24 07:46:22
