农产品光学检测的高度自动调节系统
2014-12-23 07:14彭彦昆
江苏大学学报(自然科学版) 2014年3期
林 琬,彭彦昆
(1.中国农业大学工学院,北京100083;2.国家农产品加工技术装备研发分中心,北京100083)
无损检测中光学检测是目前应用最成功、最广泛的方法之一[1].在高光谱检测系统中,为了得到清晰的图像,聚光镜到样品表面的距离有一定要求[2];在可见/近红外光谱系统中,为了保证相同的光照强度,同一批试验里光纤探头到样品的距离也要求不变[3].但是由于不同样品厚度、高度不同,因此实际样品表面与聚光镜的距离通常都不是恒定的,因此需要调节样品表面到聚光镜或者光纤探头的距离,以减少因检测位置带来的检测误差,从而提高农产品质量参数的检测精度.
农产品无损检测高光谱系统或可见/近红外光谱系统中,传统的高度调节方法是人工调节升降台,借助高度卡尺确定样品位置[4-7],这种方法费时且不易保证精度.国外研究中很多只涉及控制样品水平移动[8-11],文献[9]用到的高光谱图像采集系统是直接把样品放到载物台上,通过控制器控制水平台左右运动进行光谱扫描,这种方法并没有考虑样品厚度不同造成的光谱波动情况,影响检测精度.也有一些学者用对射式光电传感器来自动调节高度[12],当样品的最高点碰到检测线,控制高度升降的电动机停止运动,但是此方法仅适用于检测点是最高点的样品,比如像苹果一样的球形样品,如果样品的边缘部位比较高,那么此时样品停止的位置必然不是需要的检测高度.而且文献[11]中的高度调节系统是在光谱检测中使用,但是没有提及在高度调节后自动关闭光电传感器,这会对样品的光谱采集造成干扰,只能手动关闭.因此,开发一种能适用与任何形状、在高度调节后自动关闭外界光线的系统具有一定的实用性和现实意义.
1 高度自动调节原理
本研究的检测条件是高光谱检测系统,一个典型的农产品光谱成像系统的硬件组成主要由光源、CCD摄像机、成像光谱仪、镜头、图像采集卡、计算机及控制装置组成[13].在高光谱成像系统中,由于检测点通常是一条线,所以实际需要调整的高度就是检测点的高度,这就对检测传感器提出了很高的要求.考虑到激光传感器测量精度高,光束直径比较小等优点,文中的高度检测器件为激光传感器.
本研究所选的激光传感器具有高低电平输出信号,自动控制原理基于传感器的输出信号.以给定高度为基准,传感器判断当前距离与设定距离的大小关系从而输出相应的高低电平信号.如图1所示,假设用户根据需要设定样品的位置为实线位置,实际样品由于厚度不同,位置在虚线处.当样品的检测点高于设定位置时,传感器输出on信号,电动升降台需向下运动,直到传感器信号由on变为off为止;当样品检测点低于设定位置时,传感器输出off信号,电动升降台需向上运功,同理信号跳变停止运动,激光传感器发射的激光在完成高度调节后应自动关闭.
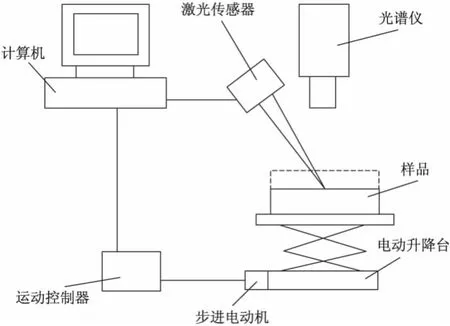
图1 高度自动调节原理
2 高度自动调节系统硬件构成
硬件系统主要由激光传感器、光电隔离电路、单片机、计算机、运动控制器和电动升降台构成.硬件结构框图如图2所示.

图2 系统硬件结构框图
系统对当前样品到传感器的高度进行测量,通过与设定好的距离进行对比,输出相应的高低电平信号,经过光电隔离和电压变换把信号传给单片机,单片机把相应的信号通过串口通信传送到计算机,计算机控制运动控制器使升降台进行运动.系统的工作流程如图3所示.
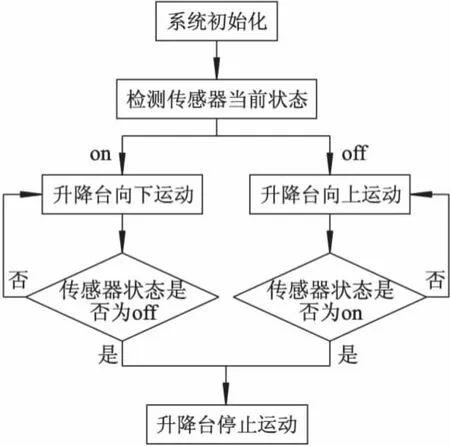
图3 工作流程图
2.1 激光传感器
激光传感器采用的是数字CMOS激光传感器(KEYENCE公司),此传感器可以设置目标物和检测头之间的距离,通过模式的设置,传感器可自动判断当前值与设定值的大小并控制输出.
2.2 光电隔离电路
由于传感器的输出要作为单片机I/O口的输入,而试验中用到的单片机的工作电压为+3.3~+5.5 V,经测量传感器输出电压不能达到其工作电压,因此需要升压.但是为了保证单片机系统的正常运行,需要防止干扰的引入,所以在设计中采用隔离模块实现单片机与外部电气系统的隔离.晶体管和晶闸管输出型是最常见的光耦合器形式,本系统选择的是晶体管输出型光电隔离器TLP 521-2,达到隔离升压的作用.
2.3 单片机系统
单片机型号选取STC 89C52RC,此单片机是宏晶科技推出的新一代高速、低功耗、超强抗干扰的单片机.传感器的输出信号接到单片机某一引脚上,程序就能通过对这一引脚的检测判断激光传感器的输出信号.由于单片机要与计算机进行通讯,而单片机的TTL电平和RS-232的电气特性完全不同,因此将PC和单片机的RXD与TXD交叉连接时必须先进行电平转换,采用带有MAX232电平转换芯片的USB转串口线可以很好地解决这一问题.
2.4 运动控制器及电动升降台
采用AH-SC3型运动控制器(安和光电有限公司),它的作用是控制升降台上下运动.由于运动控制器中包含步进电机的驱动器和串口通讯,并且可以扩展接口控制多个维度的运动,有利于后续对多维空间控制的开发,所以本设计直接通过此运动控制器控制升降台.
电动升降台采用两相步进电动机,设置公式为
曲靖市与文山州建立少数民族流动人口服务和管理协作机制 10月25日,曲靖市与文山州建立少数民族流动人口服务和管理协作机制。一是双方建立少数民族流动人口流入地和流出地的信息沟通、情况通报制度;二是双方协调本地区有关部门和有关县(市、区),为少数民族流动人口提供必要的服务和适当的便利;三是双方着力维护少数民族流动人口合法权益;四是适时交流少数民族流动人口服务管理的做法和经验,共同促进民族工作的开展。
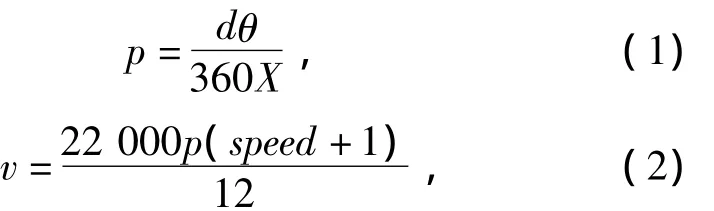
式中:p为脉冲当量,mm;d为丝杠导程,mm;X为细分数,控制器后面的拨码开关设置;θ为步距角,(°);v为电移台实际移动速度,mm·s-1;speed为用户设定的速度,范围为0~255.本系统中电机步距角为1.8°,细分数为4,丝杠导程为1 mm,速度设置为255,则

3 高度自动调节系统软件
3.1 单片机程序设计
单片机的程序主要负责循环检测激光传感器的输出的on/off信号,并把此信号进行变换通过串口输送到上位机,当单片机检测到了激光传感器输出信号的跳变时,向上位机发送stop信号.由于高度自动调整完后需要自动关闭激光,因此还要把单片机的某一引脚与传感器控制激光停止发射的线连在一起,从而使得单片机程序通过控制这一引脚开启或发射激光.
单片机在向串口发送数据时,要与计算机设置相同的波特率、停止位、校验位等.因此对串行口控制寄存器SCON、模式控制寄存器TMOD和波特率进行设置.波特率计算公式如下:
式中:S为波特率,bit·s-1;SMOD为PCON特殊功能寄存器第7位;fosc为晶振频率,MHz;x为定时器的初值.本设计中采用的单片机晶振为22.118 4 MHz,波特率为9 600 bit·s-1,所以根据式(4)得到定时器初值0xfa.
3.2 PC机程序设计
上位机程序的编写主要包括2方面:接收处理单片机发送信号的程序和控制升降台的程序.
3.2.1 接收信号处理程序
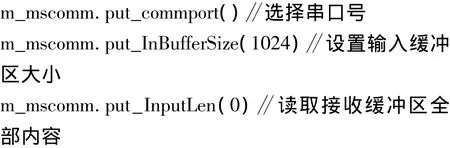
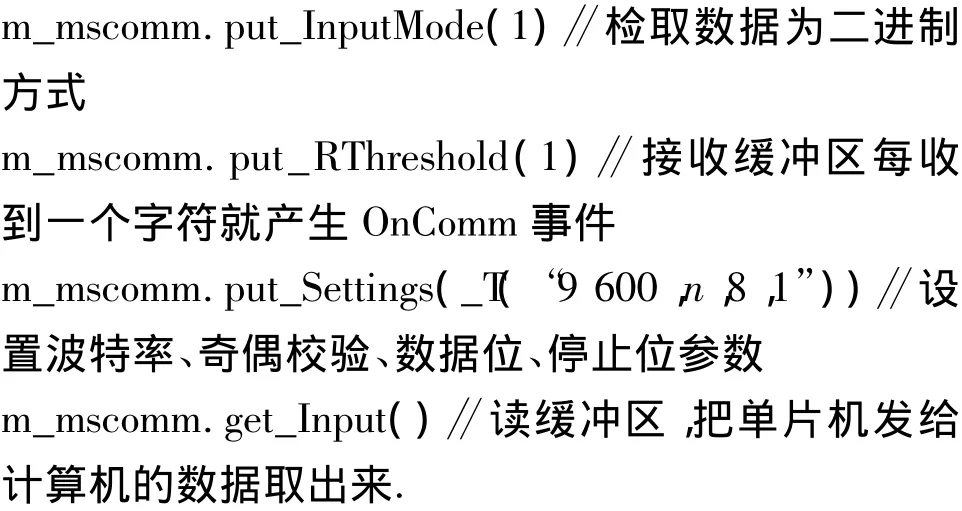
串口通信一般有3种方法:使用VC++提供的串行通信控件Mscomm;在单线程中实现自定义的串口通讯类;多线程下实现串行通信.结合实际情况,本系统采用 VC++提供的串行通信控件Mscomm来进行软件编程[14].串口通讯基于Mscomm控件进行开发的,通过对Mscomm控件的设置实现对串口号的选择、串口打开、波特率等的初始化.主要语句如下:
控制升降台运动的程序基于接收信号的状态编写的,由于检测状态是单片机发给计算机的,因此每当单片机发给计算机一个数据计算机都要进行判断,然后再做后面的处理.状态判断程序添加在Mscomm消息处理程序中,程序流程如图4所示.
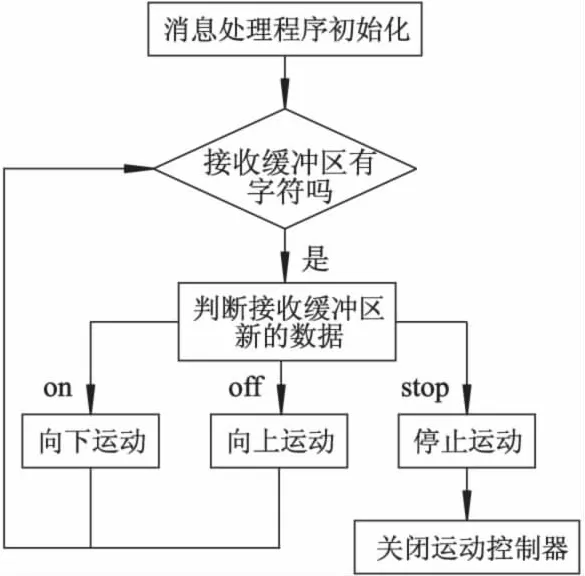
图4 上位机程序流程图
4 结果及讨论
4.1 软件操作界面功能验证
为方便用户使用本系统,用VC++编写MFC基于对话框的界面.界面主要是分成3大部分:串口打开设置、激光设置和系统运行,界面如图5所示.

图5 上位机软件界面
开始高度自动调节之前,先要对单片机和运动控制器的串口进行选择,然后按下界面中的“打开运动控制器”按钮.按下“开始自动调整”按扭开始进行高度自动调节.当升降台到达指定位置时,停止运动,系统会自动关闭激光,弹出提示框.用户也可根据自己的需要,手动开启或关闭激光.所有计算机与运动控制器有关数据的通信程序都在Mscomm控件内,包括通讯、方向及运动步数的设置.操作流程如图6所示.经过试验验证,开发的软件可以控制系统进行高度自动调节.
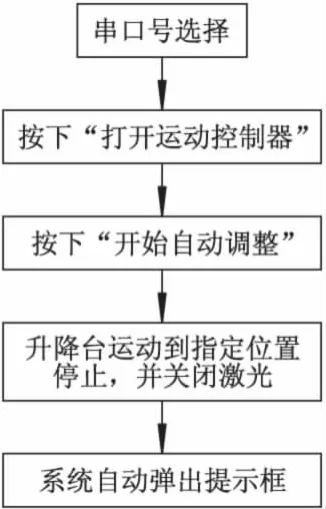
图6 软件操作流程
4.2 精度验证
对高度自动调节装置进行精度验证,验证试验主要有如下两个目的:①升降台是否能够在规定的高度位置处自动停止运动;②升降台从上下2个方向运动时,到达指定位置的误差是多少.
试验中分别把起始位置设定在规定高度的上、下两侧,这样用于检测升降台在不同方向上运动的精度,每一方向升降台的又分别从10个不同的起始位置开始,这样用于检测升降台从不同高度运行到规定位置的误差.规定高度是110.00 mm,每次做完试验都要用千分尺测量停止位置的实际高度.试验运动误差数据如表1所示.

表1 运动误差测试结果
通过试验发现,当升降台的起始位置在规定位置上面时,从10个不同地方开始运动的系统平均误差为0.64 mm;当升降台的起始位置在规定位置下面时,从10个不同地方开始运动的系统平均误差为0.54 mm;运行速度为 9.7 mm·s-1.
图7是分别从设定位置的上下2个方向开始运动,停止位置的误差图,起始位置从距设定位置1 mm开始,每测1次增加1 mm.从图7中可以看出,当样品在不同位置开始高度自动调节时,停止位置的误差相差并不大.

图7 20个点试验误差
4.3 反射光谱强度偏差验证
由于高度自动调节的目的是提高光谱检测速度的同时增加其检测精度,因此做了手动调节与自动调节的对比试验,用于检测自动调节是否能在检测不同高度的样品时比手动调节的光谱波动小.
试验条件是高光谱成像系统,因为高光谱的光源相对稳定,可以减小因光源不稳造成的光谱反射强度的变化.试验取了8块样品,为猪的外脊,每块样品的厚度约为2.5 cm.每一块样品取4个不同的点,分别在手动调节和自动调节的条件下,采集肉表面的反射强度光谱曲线.由于高光谱能同时采集光谱和空间位置信息,所以在进行数据处理时选择同一波长下,光谱强度最大的数据点作为检测点.光谱在不同检测点的波动情况可通过样品的标准差反映.试验结果如表2所示.
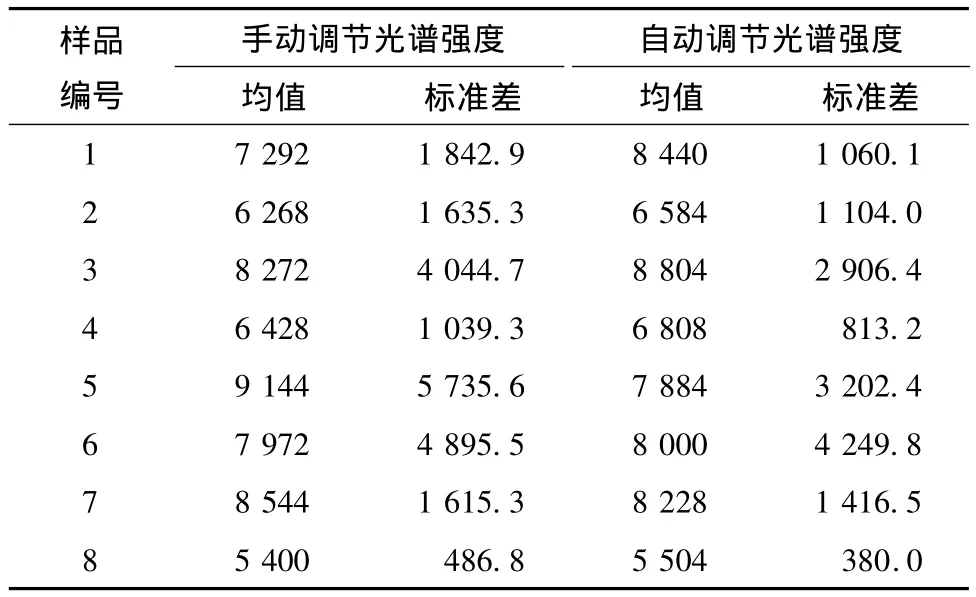
表2 对比测试结果 cd
通过表2的数据可知,经过自动高度调节装置得到的8次光谱反射强度的标准差都明显小于手动调节,因此证明自动调节装置可以有效地减小因样品表面高低不平造成的反射强度的大幅度变化,可以提高检测精度.
5 结论
本研究通过激光传感器、单片机和运动控制器的配合使用,实现对样品高度的自动检测与调节.采用MFC中基于对话框的程序设计实现软件控制,软件能在高度调节后自动关闭激光,避免干扰.样品从上向下运动时,运动位置误差约为0.64 mm;样品从下往上运动时,运动位置误差约为0.54 mm,2种方向误差都小于 1 mm,升降台的运动速度约为9.7 mm·s-1.试验研究证实,该系统调节精度高、调节速度快、能提高农产品无损检测的效率和精度,具有实用性.
References)
[1]张立彬,胡海根,计时鸣,等.果蔬产品品质无损检测技术研究进展[J].农业工程学报,2005,21(4):176-180.Zhang Libin,Hu Haigen,Ji Shiming,et al.Review of non-destructive quality evaluation technology research for agricultural products[J].Transactions of the CSAE,2005,21(4):176-180.(in Chinese)
[2]单佳佳,吴建虎,陈菁菁,等.基于高光谱成像的苹果多品质参数同时检测[J].光谱学与光谱分析,2010,30(10):2729-2733.Shan Jiajia,Wu Jianhu,Chen Jingjing,et al.Rapid nondestructive detection of apple quality attributes using hyperspectral scattering images[J].Spectroscopy and Spectral Analysis,2010,30(10):2729-2733.(in Chinese)
[3]马世榜,彭彦昆,徐 杨,等.可见/近红外光谱结合变量选择方法检测牛肉挥发性盐基氮[J].江苏大学学报:自然科学版,2013,34(1):44-48.Ma Shibang,Peng Yankun,Xu Yang,et al.Detection of beef TVB-N by visible and near-infrared spectroscopy combined with variable selection method[J].Journal of Jiangsu University:Natural Science Edition,2013,34(1):44-48.(in Chinese)
[4]吴建虎,彭彦昆,江发潮,等.牛肉嫩度的高光谱法检测技术[J].农业机械学报,2009,40(12):135-138.Wu Jianhu,Peng Yankun,Jiang Fachao,et al.Hyperspectral scattering profiles for prediction of beef tendernes[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(12):135-138.(in Chinese)
[5]黄文倩,陈立平,李江波,等.基于高光谱成像的苹果轻微损伤检测有效波长选取[J].农业工程学报,2013,29(1):272-276.Huang Wenqian,Chen Liping,Li Jiangbo,et al.Effective wavelengths determination for detection of slight bruises on apples based on hyperspectral imaging[J].Transactions of the CSAE,2013,29(1):272-276.(in Chinese)
[6]Kim Cluff,Govindarajan Konda Naganathan,Jeyamkondan Subbiah.Optical scattering in beef steak to predict tenderness using hyperspectral imaging in the VIS-NIR region[J].Sensing and Instrumentation for Food Quality and Safety,2008,2(3):189-196.
[7]Chol Byoung-Kwan,Chen Yud-Ren,Kim Moon S.Multispectral detection of organic residues on poultry processing plant equipment based on hyperspectral reflectance imaging technique[J].Computers and Electronics in Agriculture,2007,57:177-189.
[8]Liu Fei,He Yong.Discrimination of producing areas of auricularia auricular using visible/near infrared spectroscopy[J].Food Bioprocess Technol,2011,4:387-394.
[9]Kim Moon S,Delwiche Stephen R,Chao Kuanglin,et al.Visible to SWIR hyperspectral imaging for produce safety and quality evaluation[J].Sensing and Instrumentation for Food Quality and Safety,2011,5:155-164.
[10]Lorente D,Aleixos N,Gómez-Sanchis J,et al.Recent advances and applications of hyperspectral imaging for fruit and vegetable quality assessment[J].Food Bioprocess Technol,2012,5:1121-1142.
[11]Mehla Patrick M,Chen Yud-Ren,Kim Moon S,et al.Development of hyperspectral imaging technique for the detection of apple surface defects and contaminations[J].Journal of Food Engineering,2004,61:67-81.
[12]Qin J,Lu R,Peng Y.Prediction of apple internal quality using spectral absorption and scattering properties[J].Transactions of the ASABE,2009,52(2):499-507.
[13]王 伟,彭彦昆,张晓莉.基于高光谱成像的生鲜猪肉细菌总数预测建模方法研究[J].光谱学与光谱分析,2010,30(2):411-415.Wang Wei,Peng Yankun,Zhang Xiaoli.Study on modeling method of total viable count of fresh pork meat based on hyperspectral imaging system[J].Spectroscopy and Spectral Analysis,2010,30(2):411-415.(in Chinese)
[14]殷军辉,郑 坚,马春庭,等.基于单片机和MSComm通信控件的实时数据采集处理系统开发[J].科学技术与工程,2007,7(15):3702-3705.Yin Junhu,Zheng Jian,Ma Chunting,et al.Development of the real-time data acquisition and processing system based on the single chip and the communication control unit MSComm[J].Science Technology and Engineering,2007,7(15):3702-3705.(in Chinese)
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
演艺科技(2021年5期)2021-06-05
演艺科技(2020年5期)2020-07-15
技术与市场(2020年3期)2020-03-26
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
中国光学(2015年5期)2015-12-09
电子设计工程(2015年15期)2015-02-27
食品工业科技(2014年23期)2014-03-11