铲式成穴器成穴性能的离散元法仿真
2014-12-23 07:14:18纪玉杰李成华
江苏大学学报(自然科学版) 2014年1期
纪玉杰,于 淼,李成华
(沈阳理工大学机械工程学院,辽宁沈阳110159)
与传统作物开沟播种作业机具相比,铲式打穴播种机的优点在于利用一定型式的成穴装置,首先在土壤表层生成穴孔来代替开沟作业,然后利用投种装置将所播的作物种子,按照农业生产的技术要求以单粒、双粒或多粒的方式投入到穴孔中[1].显然,成穴装置的工作性能是影响播种机工作质量的关键因素之一.李成华等[1]对铲式成穴器的工作原理在理论上进行了深入的分析和实验研究,并利用计算机仿真了成穴器的工作过程,但是没有表现出土壤的动态破坏过程,无法反映打穴铲与土壤颗粒以及土壤颗粒之间的相互作用关系.离散元法可以直观观察物体的实时运动情况,可以描述散粒物料与农机工作部件的接触作用和散粒物料的流动过程,所以,可以用来仿真成穴器的工作过程,进而分析铲式打穴播种机的工作性能[2-4].
文中采用离散元仿真分析方法,对打穴铲与土壤颗粒以及土壤颗粒之间的相互作用过程进行仿真,观察土壤的动态破坏过程,进而为铲式玉米播种机工作性能分析提供一种新的方法.
1 离散元法
离散单元法以物质内部颗粒为单元,完全从构成物质的颗粒细观形态出发进行研究,是一种完善的离散物质细观分析方法.这种方法克服了连续介质理论的缺点和不足,充分发挥了离散物质细观分析方法的优点,在分析具有离散性物质的动态行为方面表现出了极大的优越性[5-8].而土壤作为典型的离散物质,在受到外力作用后,土块的破碎和分离更体现出其碎散性,因此离散元法已成为研究土壤动态行为的新手段和方法[9-12].
2 成穴器离散元仿真分析系统
根据离散元法的思想,以VC6.0为开发工具,在Windows环境下开发离散元仿真分析系统.系统流程如图1所示.
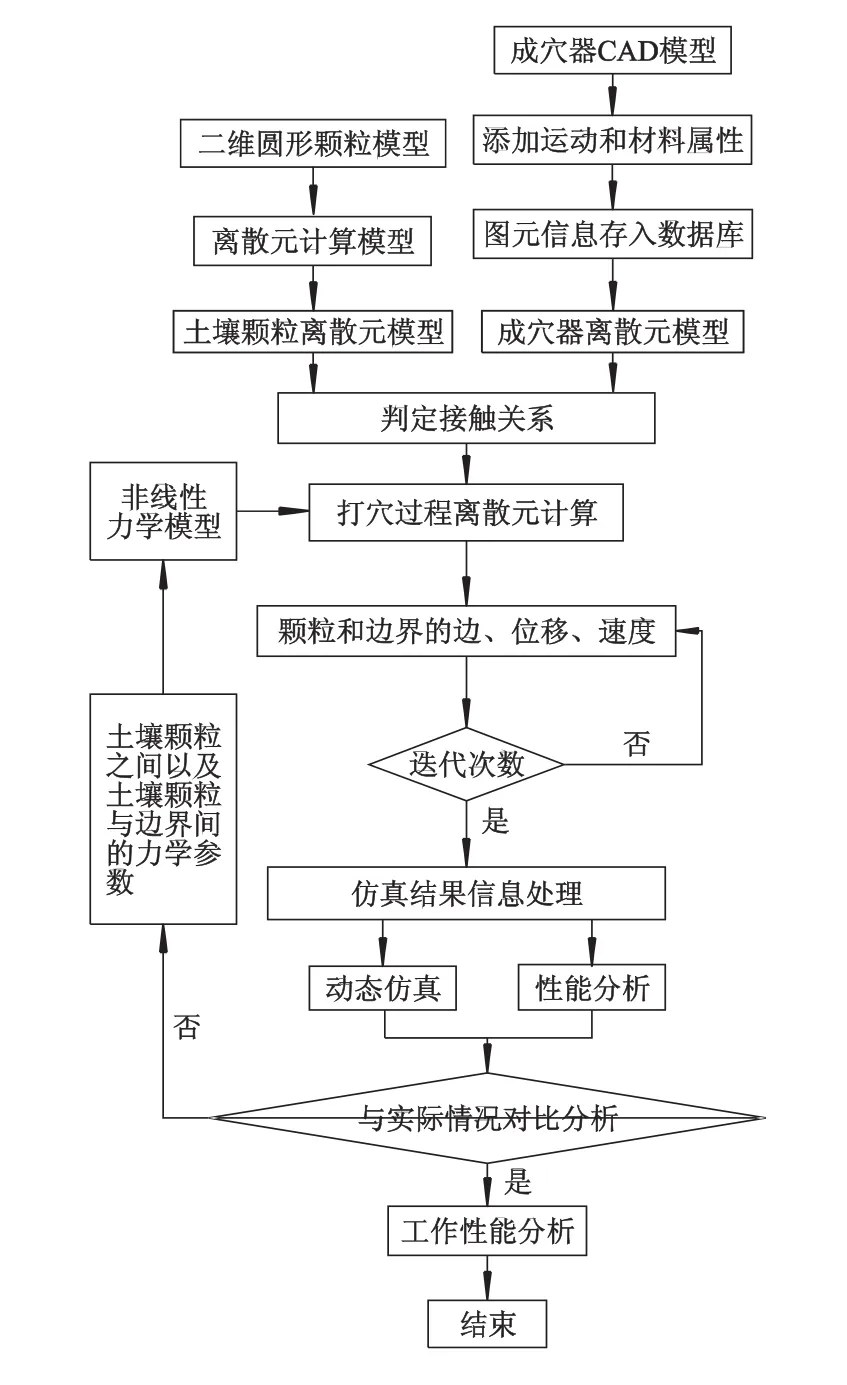
图1 离散元仿真分析系统框图
2.1 成穴器离散元计算模型
文中选用的成穴器如图2所示.采用离散元法分析成穴器工作过程时,首先应建立成穴器的离散元法分析模型.由成穴器的二维CAD模型(图3)建立成穴器的二维离散元法分析模型,即通过Object-ARX对AutoCAD进行二次开发,为成穴器CAD模型添加材料属性、运动方式等参数,并读取成穴器与土壤颗粒接触作用的图元,将图形信息存入数据库,利用MFC从数据库中提取成穴模型的信息,从而构建铲式成穴器离散元仿真模型.

图2 铲式成穴器结构示意图
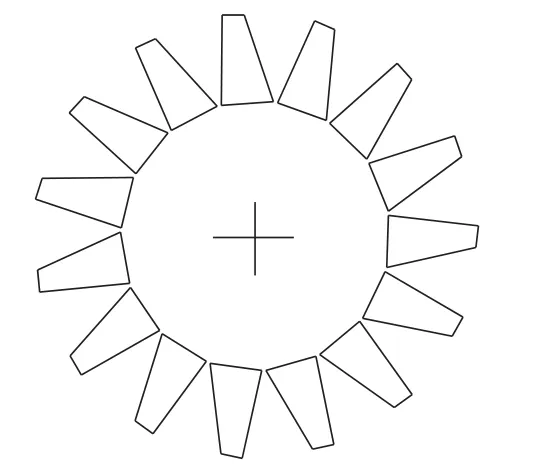
图3 铲式成穴器CAD模型
2.2 土壤颗粒离散元模型
颗粒离散元法从细观层面建立土壤的颗粒模型,可以从土壤的细观力学特性进行数值模拟,克服了连续介质法难以模拟土壤渐近破坏过程的困难.为了真实模拟土壤的内部结构,文中选用二维圆盘颗粒粒径大小服从正态分布模拟离散的土壤颗粒.
2.3 土壤颗粒力学模型
土壤中水分的存在使颗粒间产生黏结力,而形成颗粒团块.当土壤受到机械部件(如成穴器)作用时,这些黏结在一起的团块会受到破坏而分离成小的团块和离散的颗粒.因此,在建立土壤颗粒离散元力学模型时,要综合考虑这些作用力的影响.
文中在线性接触刚度模型的基础上,引入了滑移模型来反映土壤颗粒在接触点处的本构关系,加入了并行约束模型来表征土壤颗粒之间黏结力的作用,建立了土壤颗粒接触非线性力学模型,如图4所示.其中,接触法向和接触切向弹簧部分代表线性接触刚度模型,摩擦滑块部分代表滑移模型,并行约束弹簧部分代表并行约束模型,法向和切向黏性阻尼器部分代表黏性阻尼的影响[13].

图4 土壤颗粒接触非线性力学模型
文献[13]对线性接触刚度模型、滑移模型和并行约束模型进行了详细的论述,因此文中只对滑移模型和并行约束模型进行简单的叙述.
2.3.1 滑移模型
滑移是2个接触颗粒的一个固有属性.它通过限制切向力来允许颗粒之间发生滑移,通过计算最大允许切向接触力来判断滑移条件.如果切向接触力大于最大允许切向接触力,通过设定切向接触力等于最大允许切向接触力来使颗粒之间在下一计算时不发生滑移.
当δn>0时,涉及到土壤的滑移行为,根据Mohr-Coulomb 准则,当 μFnk(t)>Fτk(t)时,Fτk(t)=μFnk(t);当δn≤0时,不需要考虑滑移行为.
2.3.2 并行约束模型
并行约束模型是一种可以描述沉积在两颗粒之间一定尺度黏性物质的本构特性,可以在颗粒之间建立一种弹性相互关系,而这种关系与滑移模型并行作用.并行约束在颗粒之间建立一种弹性关系,即一系列具有法向和切向刚度的弹性弹簧,它们与描述线性接触刚度模型的点接触弹簧并行作用.
并行约束产生的合力相对于接触平面分解为法向分量和切向分量,即

式中:Fpb为并行约束合力;为并行约束法向力;为并行约束切向力.
根据梁理论,作用在并行约束上的最大法向应力和最大切向应力满足:
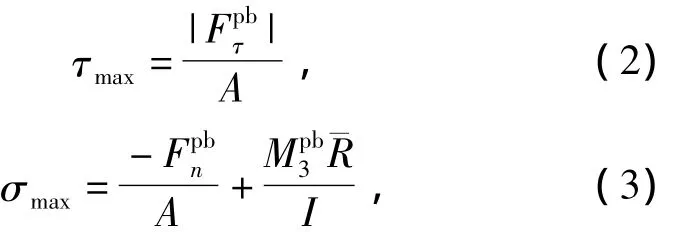
式中:τmax为最大切向向应力;σmax为最大法向应力;A为约束横街面的面积;Mpb3为当前时步并行约束合力矩;¯R为并行约束半径;I为约束横截面关于通过接触点的轴的转动惯量.
3 离散元仿真计算模型参数的选取
根据土壤的结构性和耕性,设置仿真参数值:土壤颗粒间动摩擦系数为0.4,静摩擦系数为0.5;土壤颗粒间法向刚度系数为24 000 N·m-1,切向刚度系数为21 000 N·m-1;土壤颗粒间法向阻尼系数为0.5 N·(m·s-1)-1,切向阻尼系数为0.4 N·(m·s-1)-1;土壤颗粒与成穴器间动摩擦系数为0.4,静摩擦系数为0.5;土壤颗粒与成穴器间法向刚度系数为28 000 N·m-1,切向刚度系数为23 000 N·m-1;土壤颗粒与成穴器间法向阻尼系数为0.55 N·(m·s-1)-1,切向阻尼系数为 0.45 N·(m·s-1)-1.
4 铲式成穴器工作过程的仿真
4.1 工作速度
分别分析成穴器在不同的播种速度下的成穴性能,选取播种速度分别为 1.2,1.6,2.0 和 2.2 m·s-1.仿真结果如图5所示.

图5 不同播种速度下的仿真结果
当成穴器播种深度为60 mm、土壤含水率为15%时,由二维离散元法仿真得到的土壤动态变化与文献[1]中的理论分析结果接近.从图中可以看出,当打穴铲达到预定播深离开穴孔后,土壤并没有完全自流回土,土壤表面留有打穴铲运动后的轨迹,这是因为随着速度的加快,打穴铲对土壤的扰动明显加剧,使土壤的回流覆盖效果变差.
当v=1.2 m·s-1时,土壤的回流覆盖效果理想,但是过于限制播种机的播种速度会影响到工作效率,所以适宜的工作速度为1.5~2.0 m·s-1.
4.2 土壤含水率
文中研究的铲式成穴器去除了铲斗式和鸭嘴式成穴器上的开、闭活门,通过打穴铲的特殊运动轨迹来保证打穴铲上的投种口不与土壤发生接触,可以避免成穴部件被土壤堵塞的问题,但是当土壤黏度较大时,成穴器的成穴质量还是会受到一定的影响,将对不同含水率的土壤进行离散元仿真.
当播种深度为60 mm,播种速度为1.5 m·s-1时,选取含水率为5%,15%,21%和25%的土壤进行离散元仿真计算.
仿真结果如图6所示,随着含水率的增加,土壤的回流覆盖效果变差,这是由于水分的存在使土壤颗粒之间有一定的黏结力,含水率越高,土壤的黏结现象越是明显,这些黏结在一起的土壤团块,流动性差,从而影响成穴器的播种深度,在一定程度上,影响了种子的发芽率.

图6 不同土壤含水率的仿真结果
图6中的仿真结果与文献[1]中的理论分析结果和试验结果变化趋势相一致,说明所建立的铲式成穴器的离散元计算模型可以用于进行铲式成穴器成穴性能的仿真分析.
5 结论
在线性接触刚度模型和滑移模型的基础上,加入了并行约束模型来表征土壤颗粒之间由于水分的存在而产生的黏结力,从而建立了土壤颗粒接触非线性力学模型,结果表明:随着工作速度的加快,可以看到土壤的扰动明显加剧,回流覆盖效果变差;随着土壤含水率的增加,土壤的团聚现象明显,土壤流动性差,自留回土效果变差.初步说明了采用离散元法分析铲式成穴器成穴性能的可行性,为铲式成穴器的研究提供了一种新的仿真分析方法.
References)
[1]李成华,何 波.铲式玉米精密播种机仿真及虚拟设计[M].北京:中国农业大学出版社,2007.
[2]于建群,钱立彬,于文静,等.开沟器工作阻力的离散元法仿真分析[J].农业机械学报,2009,40(6):53-57.Yu Jianqun,Qian Libin,Yu Wenjing,et al.DEM analysis of the resistances applied on furrow openers[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(6):53-57.(in Chinese)
[3]李丽华,唐辉明,刘数华.月壤及模拟月壤微观结构的研究[J].岩土力学,2012,33(1):31-34.Li Lihua,Tang Huiming,Liu Shuhua.Microstructure of lunar soil and lunar soil stimulant[J].Rock and Soil Mechanics,2012,33(1):31-34.(in Chinese)
[4]陈 进,周 韩,赵 湛,等.基于EDEM的振动种盘中水稻种群运动规律研究[J].农业机械学报,2011,42(10):79-83.Chen Jin,Zhou Han,Zhao Zhan,et al.Analysis of rice seeds motion on vibrating plate using EDEM[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(10):79-83.(in Chinese)
[5]赵 湛,李耀明,陈 进,等.种群空间分布状态对排种器吸种性能的影响[J].江苏大学学报:自然科学版,2009,30(6):559-563.Zhao Zhan,Li Yaoming,Chen Jin,et al.Influence of seeds spatial distribution on suction performance of precision vacuum seeder[J].Journal of Jiangsu University:Natural Science Edition,2009,30(6):559-563.(in Chinese)
[6]Mak J,Chen Y,Sadek M A.Determining parameters of a discrete element model for soil-tool interaction[J].Soil&Tillage Research,2012,118:117-122.
[7]Obermayr M,Dressler K,Vrettosb C.Prediction of draft forces in cohesionless soil with the discrete element method[J].Journal of Terramechanics,2011,48:347-358.
[8]Bhandari A,Han J.Investigation of geotextile-soil interaction under a cyclic vertical load using the discrete element method[J].Geotextiles and Geomembranes,2010,28:33-43.
[9]Kang D H,Yun T S,Lau Y M,et al.DEM simulation on soil creep and associated evolution of pore characteristics[J].Computers and Geotechnics,2012,39:98-106.
[10]Ono I,Nakashima H,Shimizu H,et al.Investigation of elemental shape for 3D DEM modeling of interaction between soil and a narrow cutting tool[J].Journal of Terramechanics,2013,50(4):265-276.
[11]Farahnak Langroudi M,Soroush A,Tabatabaie Shourijeh P,et al.Stress transmission in internally unstable gapgraded soils using discrete element modeling[J].Powder Technology,2013,247:161-171.
[12]Yimsiri S,Soga K.Effects of soil fabric on behaviors of granular soils:microscopic modeling[J].Microscopic Modeling Computers and Geotechnics,2011,38(7):861-874.
[13]张 锐.基于离散元细观分析的土壤动态行为研究[D].长春:吉林大学生物与农业工程学院,2005.
猜你喜欢
林业机械与木工设备(2022年5期)2022-05-27 09:28:56
加油站服务指南(2021年4期)2021-07-21 02:29:22
中国粉体技术(2021年1期)2021-01-04 02:19:18
河北理科教学研究(2020年3期)2021-01-04 01:49:32
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
重型机械(2019年3期)2019-08-27 00:58:46
长江科学院院报(2018年12期)2018-12-19 09:52:02
电子制作(2016年1期)2016-11-07 08:42:56
发明与创新·中学生(2016年3期)2016-03-29 04:44:22
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:22