用于系统能效动态评估的异步电机参数辨识
2014-12-19 03:15:28葛苏鞍帕尔哈提阿布都克里木赵海森葛永广
华北电力大学学报(自然科学版) 2014年5期
葛苏鞍,帕尔哈提·阿布都克里木,赵海森,葛永广
(1.中国石油新疆油田分公司实验检测研究院,新疆克拉玛依834000;2.华北电力大学电气与电子工程学院,北京102206)
0 引言
目前,国内外电机系统能效评估中,最重要的一个环节就是电机运行效率的在线评估,即利用电机输入功率和输出机械功率求出电机实时运行效率。因此,国内外学者开展了大量有关异步电机能效评估方法的研究,提出了多种监测方法[1~6],包括铭牌法、转差率法、电流法、损耗分析法、等效电路法和气隙转矩法等。关于上述能效评估方法的物理本质及能效评估精度,文献[1]中进行了相关分析,并指出从能效评估精度角度考虑,等效电路法与气隙转矩法比较适用于生产实际,但从模型简单化、计算量小等角度考虑,等效电路法则具有更大的优势。等效电路法的特点是不对已经投运的系统进行改造,具有成本低、运行可靠等优点,但其本质是属于对效率的估算,对电机的能效评估难免会产生一定的误差。在基于等效电路法的电机系统能效评估中[7],电机参数的准确与否直接影响电机运行效率的评估精度。为了能够利用该方法对电机能效进行准确评估,首先需要解决的问题就是对电机等效电路参数进行在线辨识,进而使用辨识出的参数,完成能效的动态评估。因此,研究一种精确的电机参数在线辨识方法,对电机系统在线监测及其能效评估具有重要的意义。
在异步电机参数的在线辨识方法方面,国内外学者提出许多在线辨识算法,包括模型参考自适应法、卡尔曼滤波器法、人工智能方法]和最小二乘法等,这些在线辨识方法各有其优缺点[8]。例如,Lorenz R 利用基于转矩模型的自适应方法实现了转子电阻辨识,但该方法需要已知电机电感参数[9],文献[10]在电机稳态运行的状态下,运用包含转子电阻参数的定子d 轴电压方程作为可调模型,以PI 调节得到的d 轴电压指令作为参考模型,设计了转子电阻辨识算法,实现了转子电阻在线辨识。文献[11]采用扩展卡尔曼滤波法辨识异步电机定转子电阻,适用于有噪声污染的系统,但计算量较大;Abdelhadi B 等将改进的自适应遗传算法用于电机参数辨识,避免了传统遗传算法在解决高效电机工程问题中的标准形式进化缓慢、运算时间长的缺点,但该人工智能方法目前还处于仿真阶段[12];李建军等在忽略转速变化条件下,利用递推最小二乘法对电机参数进行辨识,参数辨识结果受转速波动影响较大[13];文献[14]为了提高无位置传感器的永磁同步电机控制系统的内部性能,运用递推最小二乘法对永磁电机q 轴电感和定子电阻进行在线辨识。
为了能够快速、准确地在线辨识得出电机参数,文中提出基于RLS(Recursive Least Square Method,RLS)与MRAS(Model Reference Adaptive Control System,MRAS)的鼠笼式异步电机转子电阻在线辨识方法,即将递推最小二乘法和模型参考自适应法结合用于电机参数的在线辨识。该方法既可避免最小二乘法、扩展卡尔曼滤波法等方法计算量大与假设条件多的缺陷,又可避免模型参考自适应法所需参数较多、参考模型准确性不高的缺点。文中以一台5.5 kW 电机为例进行了电机参数在线辨识的仿真与实验研究,验证了文中提出参数辨识方法的正确性与有效性,并将所得辨识的参数用于系统能效动态评估的实例分析。实验结果证明,使用在线辨识参数的基于等效电路法的能效动态评估结果与传统的实验测试结果相近、误差较小,进一步验证了文中方法的正确性与可行性。
1 基于等效电路法的电机能效评估原理
异步电机的等效电路见图1所示[15],运用等效电路法评估电机效率是建立在该等效电路的6个参数之上,即定、转子电阻Rs与Rr,励磁电阻Rm,定子漏电抗Xsσ,转子漏电抗Xrσ和励磁电抗Xm。其优点在于若等效电路的6 个参数已知便可求得任何负载情况下的电机效率。

图1 异步电机等效电路Fig.1 Asynchronous motor equivalent circuit
图中,Rs,R’
r 分别为T 型等效电路中的定子电阻和转子电阻的归算值;分别为定子漏抗、转子漏抗的归算值;Xm为电机的励磁电抗。
T 型等效电路算法统一如下:
在异步电机稳定运行工况下,电机输入的有功功率P1的计算式为

定子铜损耗为

正常运行工况下的三相异步电动机的铁损耗为

则电磁功率为
转子绕组中的铜损耗pcu2为

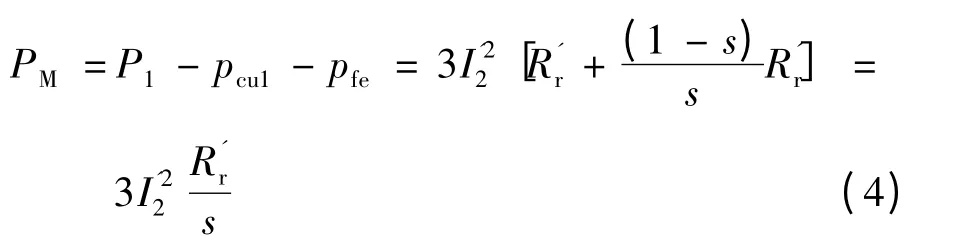
同时,电机转轴上的机械功率为

在电动机中,除了上述各部分损耗外,还会产生由轴承及风扇引起的机械损耗pm与由定、转子开槽产生的谐波引起的杂散损耗pa。杂散损耗pa大约为额定输入功率的0.5 %,风摩耗pfw由空载试验获得[16]。
电机轴端输出的功率P2为机械功率Pm去除附加损耗pa和机械损耗pm,即

然后根据式(1)~(7)可得电机转轴上的输出功率P2为

整个电机系统功率关系用功率流程图表示[17],如图2所示。
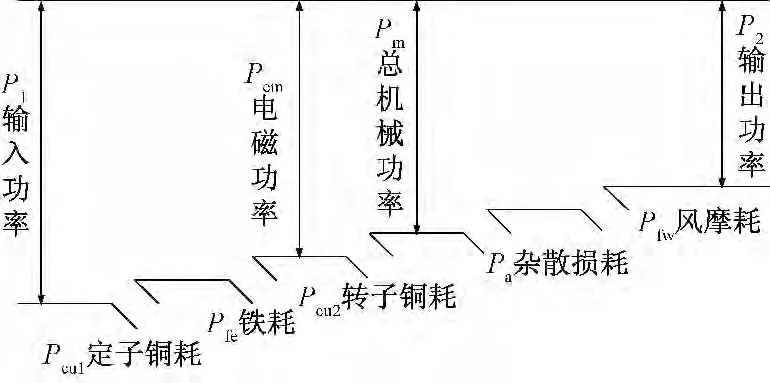
图2 电动机功率流程图Fig.2 Flow chart of motor power
电机效率为输出功率P2与输入功率P1之比:

式中:Σp 为异步电机的总损耗;P2为输出功率;P1为输入功率;η 为效率。
2 异步电机参数在线辨识原理
2.1 基于RLS 与MRAS 的参数在线辨识理论
为了能够实时准确地获取鼠笼式异步电机参数,提出一种将递推最小二乘法与模型参考自适应法相结合的转子电阻在线辨识方法。该方法既可避免最小二乘法、扩展卡尔曼滤波法等方法计算量大与假设条件多的缺陷,又可避免模型参考自适应法所需参数较多、参考模型准确性不高的缺点。辨识思想是:首先,当电机处于某一特定运行状态、转速变化不大的情况下,利用带遗忘因子的递推最小二乘法辨识出电机定转子漏电感、励磁电感以及转子电阻初值;在此基础上,采用基于瞬时无功功率模型的自适应方法,利用Popov 超稳定性理论设计辨识系统的自适应律,完成转子电阻在线辨识。
2.2 基于dq0 坐标系下的带遗忘因子的递推最小二乘法的电机参数辨识
最小二乘法是参数估计中最成熟,最基本的方法,其辨识结果具有无偏性、一致性、有效性等优点。递推最小二乘法(RLS)普遍应用于电机参数辨识研究,而在实际应用中,由于优化过程中用到目标函数对电机参数的导数,故这种方法对噪声很敏感。为了克服最小二乘法受噪声影响大的缺点,文中采用带遗忘因子的递推最小二乘法,其递推公式如式(10)所示[18]:

式中:qN为待辨识参数;KN+1为增益矩阵;jN为观测矩阵;PN为协方差矩阵;λ 为遗忘因子。
根据异步电机在dq0 坐标系下的动态数学方程,经过数学运算,推导可得异步电机标准最小二乘法形式的参数辨识模型[19],如式(11)所示。

式中:Usd,Usq,Isd和Isq为dq0 坐标系下的定子d,q轴电压与电流是辨识系统的输入输出数据;ωr为电机的电角速度;k1,k2,k3,k4和k5为辨识系统的待辨识参数,其与电机参数之间的关系为
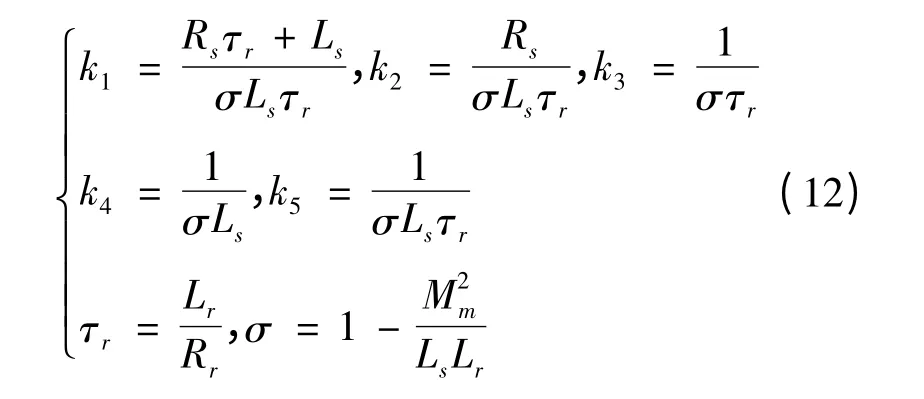
式中:τr对应电机中的转子时间常数;σ 是电机漏磁系数;Ls和Lr分别为电动机定转子的总自感;Mm为电机的激磁电感;Rr为转子电阻。
对式(12)进行离散化处理,运用带遗忘因子递推最小二乘算法对辨识模型中的待辨识参数k1~k5进行递推估计,最后计算得出电机Ls,Lr,Mm和Rr的参数值。
2.3 基于瞬时无功功率的转子电阻自适应辨识方法
辨识电机转子电阻的MRAS 主要有基于转子磁链、反电动势以及无功功率模型的方案。文中选用无功功率模型作为转子电阻辨识方案,下面简要推导基于瞬时无功功率的转子电阻自适应辨识模型。由电机学中两相静止坐标系下的异步电机方程,经过数学推导,获得异步电机的反电动势矢量[20]:
定义瞬时无功功率为交流电压和交流电流的叉积,如式(14)所示,并推导可得基于瞬时无功功率的转子电阻辨识模型,如式(15)和式(16)所示。

式(16)和(17)中:usa,usb为定子a 轴,b 轴电压;isa,isb为定子a 轴,b 轴电流;yra,yrb为转子a 轴,b轴磁链;qref,qadj为不同模型下的无功功率。
以式(16)为参考模型,式(17)为可调模型,按照Popov 超稳定理论设计方法,可采用最简单的自适应机构,即PI 调节器转子电阻自适应律,如式(17)所示。
Donoho等根据小波域中有用信号和噪声的能量分布特点,提出了软阈值函数和硬阈值函数,由于函数结构简单,去噪效果良好,软、硬阈值函数得到了广泛的应用。软阈值函数表达式为:

转子电阻在线辨识就是按照瞬时无功功率的误差进行调节,式中p 为微分算子。可以证明,上述MRAS 是大范围渐进稳定的[21]。如果辨识的转子电阻与实际值不一致,那么无功功率的参考模型输出qref和可调模型输出qadj将不相等,两个无功功率之差不为零,会驱动自适应机构中的PI调节器,不断改变辨识的转子电阻,直到其等于实际转子阻值,当参考模型和可调模型的差为零,辨识完成。由于基于瞬时无功功率的可调模型依赖于转速,故该辨识方案可有效计及电机转速变化。
2.4 电机参数在线辨识流程
(1)基于RLS 的电机电感参数确定
电机在稳定运行时,可认为转速变化不大,因此,可以利用带遗忘因子的递推最小二乘法辨识出电机电感参数。利用MATLAB 软件中的M 语言对辨识算法进行编程,即可完成电感参数的辨识。图4 为带遗忘因子递推最小二乘算法的程序流程图。
(2)基于MRAS 的转子电阻在线辨识
在电机正常运行过程中,可认为其磁路饱和程度近似不变,电感值变化较小,故上述基于RLS辨识出的电感值可作为自适应系统中所用的常值、转子阻值作为其辨识初值,再利用基于瞬时无功功率模型的自适应方法,完成转子电阻在线辨识。
3 实例分析
3.1 电机参数辨识实例
对一台Y132S-4,5.5 kW 异步电机在100%,75 %,50 %和25 %不同负载工况下的等效电路参数进行辨识。辨识过程中用到的数据均来源于实验室实测的定子电压与电流,其中数据的采样频率为10 kHz。由空载和堵转实验测得其等值电路参数后,根据等值电路参数与电机自感互感之间关系[17],可得电机参数分别为:Rs=2.43 Ω,Rr=2.37 Ω,Lr=Ls=0.432 8 H,Mm=0.412 2 H。对其在额定电压380 V 条件下,满载,75 %,50 %与25 % 4 种负载工况下,运用带遗忘因子的递推最小二乘法辨识电机的定子自感Ls和励磁电感Mm,辨识结果如图3所示。
由辨识图可看出,电机电感参数的辨识值与空载- 堵转试验实测电感值相近,验证了采用RLS 的电感参数在线辨识方法的有效性。将RLS法辨识所得的Ls和Mm值带入基于瞬时无功功率模型的自适应转子电阻辨识系统,在线辨识出转子电阻值。图4(a)、(b)、(c)、(d)分别给出了满载、75 %,50 %与25 %负载工况下转子电阻辨识结果,可以看出,文中辨识算法收敛速度快,且不同工况下转子电阻辨识值与实测值非常接近。此外,受电机系统测量噪声和辨识模型误差的影响,辨识结果有一定波动性,但对辨识结果并无太大影响,可取其平均值作为最终辨识结果。
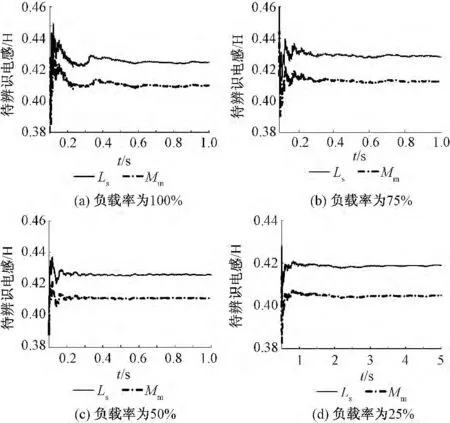
图3 基于RLS 的不同负载时的电感辨识值Fig.3 Identification values of inductor under different loads based on RLS
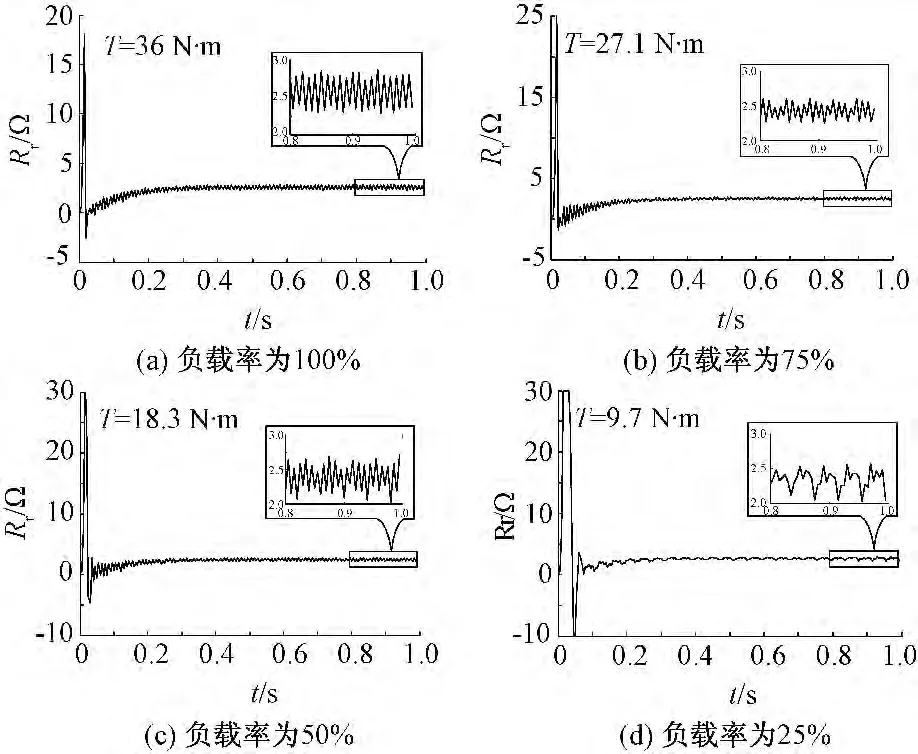
图4 基于MRAS 的不同负载时的转子电阻辨识值Fig.4 Identification values of rotor resistance under different loads based on MARS
为了充分验证文中方法的正确性,将5.5 kW鼠笼异步电机在380 V 电压,满载、75 %、50 %和25 % 4 种负载下参数辨识值与其“真实值”作对比。由于在电机运行过程中,电感变化较小,故定转子的电感“真实值”即为电机空载-堵转实验的实测值,而转子电阻在不同运行工况下变化较大,且具有不可测性,而是根据电机的等效电路,列写电路方程,求解得到,并非其实测值。归纳总结如表1所示。

表1 参数辨识值与其“真实值”对比Tab.1 Comparison of parameter identification values and real values
可以看出,文中所采用的电机参数在线辨识方法十分准确地估计出电机参数,相对误差均不超过“真实值”的5 %,达到精确地辨识电机参数的目的。
3.2 实验验证
满载工况下,实测定子电压、电流波形如图5所示,表2 为使用基于RLS 与MRAS 的鼠笼式异步电机参数在线辨识方法辨识得到的5.5 kW 电机等效电路参数。利用表2 辨识所得的电机参数,求得电机的输出功率及效率,并与实测结果对比,如表3所示。由表3 的对比结果可知,使用在线辨识方法获取的电机参数对电机能效动态评估,评估所得的电机效率与转矩仪实测结果相差不大,效率的相对误差在5 %以内,基本符合工程要求。
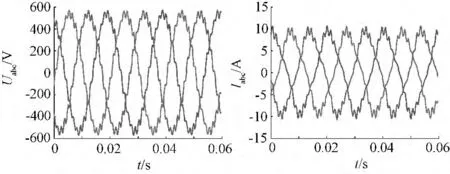
图5 满载工况下采集的电机三相电压与电流波形Fig.5 Motor waveform of three phase voltage and current in the case of full load
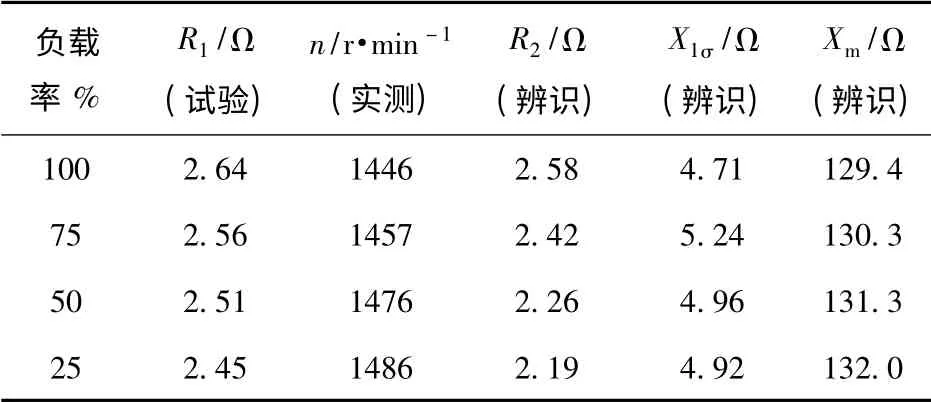
表2 1 台5.5 kW 电机在线辨识所得的等值电路参数Tab.2 Motor online identificated equivalent circuit parameters of a 5.5 kW motor

表3 转矩仪方法与等效电路法对电机能效评估的结果对比Tab.3 Comparison of energy efficiency estimation by torque method and equivalent circuit method
4 结论
本文针对用于系统能效动态评估的异步电机参数在线辨识方法进行了深入细致的研究,提出了一种将RLS 与MRAS 的两种方法相结合的鼠笼式异步电机参数在线辨识方法,并将该辨识方法应用于电机系统的能效动态评估,取得了较好的评估效果,并对工程实际中基于等效电路法的电机能效动态在线评估提供了重要理论支撑与技术支持。
[1]John S Hsu,John D Kueck,Mitchell Olszewski.Comparison of induction motor field efficiency evaluation methods[J].IEEE Transactions of Industry Applications,1998,34 (1):117-125.
[2]Austin H.Bonnett.An updata on AC induction motor efficiency[J].IEEE Transactions on Industry Applications,1994,30 (5):1362-1372.
[3]Charles L Becnel,John W Kilgore,Edgar F Merrill.Determining motor efficiency by field testing[J].IEEE Transactions on Industry Applications.1987,23 (3):440-443.
[4]John S Hsu,Patrick L Sorenson.Field assessment of induction motor efficiency through aif-gap torque[J].IEEE Transactions on Energy Conversion,1996,11(3):489-494.
[5]Paul G Cummings,W D Bowers,Walter L Martiny.Induction motor efficiency test methods[J].IEEE Transactions on Industry Applications,1981,17 (3):253-272.
[6]John S.Hsu.Field test of motor efficiency and load changes through air-gap torque[J].IEEE Transactions on Energy Conversion,2003,10 (3):477-483.
[7]Bin Lu,Thoma G Habetler,Ronald G Harlley.A survey of efficiency-estimation methods for in-service induction motors[J].IEEE Transactions on Industrial Applications,2006,42 (4):924-927.
[8]杜中兰,赵海森,刘晓芳,等.基于dq0 坐标系的异步电机等效电路参数在线辨识方法研究[J].华北电力大学学报,2013,40 (3):30-36.
[9]Lorenz R D.A simplified approach to continuous online tuning of field-oriented induction machine drives[J].IEEE Transactions on Industrial Applications,1990,26 (3):420-424.
[10]Xing Yu,Matthew W.Dunnigan.A novel rotor resistance identification method for an indirect rotor flux-orientated controlled induction machine system[J].IEEE Transactions on Power Electronics,2002,17 (3):353-363.
[11]Barut M,Bogosyan S,Gokasan M.Experimental evaluation of braided EKF for sensorless cintrol of induction motors[J].IEEE Transactions on Industry Electronics,2008,55 (2):620-632.
[12]Abdelhadi B,Benoudjit A,Nait-S aid N.Application of genetic algorithem with a novel adaptive scheme for the identification of induction machine parameters[J].IEEE Transactions on Energy Conversion,2005,20(2):284-291.
[13]李建军,盛洁波,王翠,等.异步电机定转子参数的辨识方法研究[J].电工技术学报,2006,21(1):70-74.
[14]Yukinori Inoue,Yasunori Kawaguchi,Shigeo Morimoto,et al.Performance improvement of sensorless IPMSM drives in a low-speed region using online parameter identification[J].IEEE Transactions on Industry Applications,2011,47 (2):798-803.
[15]李发海,朱东起.电机学[M].北京:科学出版社,2007:12-384.
[16]GB/T 2013-2006/IEC 61972:2002,三相笼形异步电动机损耗和效率的确定方法[S]
[17]胡虔生.电机学[M].北京:中国电力出版社,2005.156-320.
[18]叶建华.过程辨识技术[M].上海:上海大学出版社,2007.84-87.
[19]Jennifer Stephan,Marc Bodson.Real-time estimation of the parameters and fluxes of induction motors[J].IEEE Transactions on Industrial Applications,1994,30(3):746-758.
[20]佘致廷,肖岸文,孙炜.基于MRAS 理论的无速度传感器直接转矩控制调速系统[J].电工技术学报,2005,21 (4):98-101.
[21]Maiti S,Chakraborty C,Hori Y.Model reference adaptive controller-based rotor resistance and speed estimation techniques for vector controlled induction motor drive utilizing reactive power[J].IEEE Transactions on Industrial Electronics,2008,55 (2):594-601.
猜你喜欢
电工技术学报(2023年15期)2023-08-10 06:43:38
电气技术(2023年7期)2023-08-08 05:26:36
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
印刷工业(2020年5期)2020-03-29 06:46:50
流程工业(2017年4期)2017-06-21 06:29:48
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:10
振动、测试与诊断(2014年4期)2014-03-01 01:14:00
自动化博览(2014年6期)2014-02-28 22:32:07
中国质量与标准导报(2013年8期)2013-03-11 19:54:05