
Passivity-based consensus for linear multi-agent systems under switching topologies
2014-12-11 06:43:23ZhiFENGGuoqiangHU
Control Theory and Technology 2014年3期
Zhi FENG,Guoqiang HU
School of Electrical and Electronic Engineering,Nanyang Technological University,Singapore 639798
Passivity-based consensus for linear multi-agent systems under switching topologies
Zhi FENG,Guoqiang HU†
School of Electrical and Electronic Engineering,Nanyang Technological University,Singapore 639798
This paper studies the passivity-based consensus analysis and synthesis problems for a class of stochastic multi-agent systems with switching topologies.Based on Lyapunov methods,stochastic theory,and graph theory,new different storage Lyapunov functions are proposed to derive sufficient conditions on mean-square exponential consensus and stochastic passivity for multi-agent systems under two different switching cases,respectively.By designing passive time-varying consensus protocols,the solvability conditions for the passivity-based consensus protocol synthesis problem,i.e.,passification,are derived based on linearization techniques.Numerical simulations are provided to illustrate the effectiveness of the proposed methods.
Consensus;Linear multi-agent systems;Passivity and passification;Networks with switching topology
1 Introduction
Multi-agent dynamic systems with interesting collective behaviors exist extensively in biological,physical,and engineering systems.Recently,cooperative control of multi-agent systems has received considerable attention due to its broad applications in control and robotics.One of the important and fundamental issues is the consensus problem(e.g.,see[1–5],just name a few).The objective of this problem is to design a distributed protocol utilizing the information among neighboring agents so that they can eventually reach an agreement on certain quantities of interest(e.g.,attitude,position,velocity).Surveys of most recent advances in this area can be found in[6]and[7].Consensus algorithms have direct applications in formation control[8],distributed sensor networks[9],and rendezvous[10].
The consensus problem has been extensively investigated during the past decade.It is worth to mention the following three lines of research focuses.1).People study the consensus problem from different types of agent dynamics including first-order,[1,2,11,12],second-order or high-order dynamics,[4,13–22].Note that for the second-order or high-order dynamics,their consensus performance depends not only on the connectivity property of interaction graphs,but also onthe parameters of consensus protocols.2).Networkrelated communication issues such as switching network topologies and communication delays are crucial to the performance of multi-agent systems.In real networks,due to link failure or creation in networks of mobile nodes,the communication topology can be dynamically changing.On the other hand,time delays are unavoidable due to the limited capacity of the sensing and communication equipments.Considering these two issues,performance degradation and potentially unpredictable response from systems may occur,which makes it necessary to study consensus problems under such cases.In[1],three results on consensus were derived under the assumption that all the delays were equal and time-invariant.In[17],a sufficient consensus condition was derived by a delay-partition method and the linear matrix inequity(LMI)tool.3).In reality,the dynamics of agents are usually subject to various external disturbances and stochastic noises[19–22].For example,[20]proposed a distributed tracking control scheme for a leader-follower multi-agent system with measurement noises.For high-order multi-agent systems with external disturbances,an output consensus problem was investigated by an H∞approach in[21]using LMI tool.
Motivated by the above mentioned issues,this paper studies the consensus analysis and synthesis problems for a class of multi-agent systems with switching topologies,time delays,and stochastic disturbances.Our methodology is built upon the passivity theory.Passivity,as a particular case of dissipativity,was introduced by Willems[23]and later generalized by Hill and Moylan[24]in linear and nonlinear system theory.The passivity theory,intimately related to the circuit analysis method[25],means that the systems cannot generate more energy than those they absorb and thus become a useful tool for analysis and synthesis of control systems.Recently,the passivity theory is employed to analyze disturbance attenuation performance[26–29].By defining different storage functions,the control systems can be stabilized to achieve different kinds of attenuation performance such as the strictly input passive property,which is extensively utilized to constrain the disturbances[28,29].
In the existing literature,some attempts are reported to explore the passivity theory in analyzing and controlling multi-agent systems[26,30–35].Arcak[30]used passivity as a tool for constructing a stabilizing feedback law for group coordination,and extended this method to study the adaptive motion coordination design problem in[31].For complex dynamical networks,the passive stability and stabilization and synchronization problems were investigated for the general and spatio-temporal switching complex networks[26,32],respectively.Recently,the passivity-based coordination of rigid bodies has also been studied in[33,34].For example,Igarashi et al[33]and Hatanaka et al[34]proposed a distributed velocity input protocol via passivity to achieve attitude and pose synchronization.
It should be pointed out that up to date,few results on passivity consensus analysis and passification are reported for stochastic linear multi-agent systems,especially considering the coupling presence of switching topologies,time-varying delays,and external disturbances.Under the analysis of the above mentioned issues,it is challenging to design distributed protocols to achieve the accurate consensus for multi-agent systems.In this paper,the passivity consensus and passification problems are investigated for stochastic linear multi-agent systems with two kinds of switching topologies,i.e.,arbitrary switching topology and slow switching topology with average dwell time.The distributed passive stochastic protocols containing the communication time-varying delays are proposed.Based on Lyapunov function methods and tools from stochastic theory,and algebraic graph theory,we establish the delaydependent sufficient condition under which the proposed protocols achieve mean-square exponential consensus and stochastic passivity.Furthermore,in light of passification,we design the system matrix gains of the consensus protocols by solving LMIs.Examples and numerical simulations are provided to demonstrate the effectiveness of the results.
This paper is organized as follows.The passivity and passification problems for stochastic multi-agent systems are formulated in Section 2.The main results are presented for two different switching cases in Section 3.Section 4 gives numerical simulations,followed by the conclusions in Section 5.
2 Preliminaries and problem formulation
2.1 Graph theory[40]

Lemma 1[2] The graph G has a spanning tree if and only if its Laplacian matrix L satisfies the following properties:
1)Zero is a simple eigenvalue of L,and 1nis the corresponding eigenvector,that is L1n=0.
2)The rest n−1 eigenvalues all have positive real parts.In particular,if the graph G is undirected,then all these eigenvalues are positive and real.


Let L ∈ Rn×nbe the Laplacian matrix of any undirected graph,then
2.2 Problem formulation
Consider a class ofˆ Ito stochastic multi-agent systems as

where xi(t)∈Rmis the system state,ui(t)∈Rpis the control input or protocol,vi(t)∈Rqis the external disturbance which belongs to L2[0,∞),and wi(t)is a onedimension independent standard Wiener process satisfying E{dwi(t)}=0 andThe matrices A,B,E,and F are constant matrices with appropriate dimensions.
As discussed above,passivity represents the energy change of systems in terms of the input and output relationship.Therefore,for the stochastic multi-agent system(1),we define the following controlled output function

to measure the disagreement of xi(t)to the average state of all the agents i=1,2,...,n.
Remark 1The state zi(t)is defined as the controlled output of(2)for analyzing its consensus behavior by the passivity theory.Passivity as a useful tool for the analysis and synthesis of control systems,has been extensively employed to analyze the disturbance attenuation performance[27–29].In(2)illustrates the disagreement degree of the consensus states of all the agents.If z(t)=0 is satisfied,then xi(t)=xj(t)holds,which means that the consensus of all the agents with dynamics(1)is achieved.In addition,the satisfaction of the stochastic passivity indicates good consensus performance of the multi-agent system(1).
In networked systems,the neighbors’information is often delayed due to transmission delay.Thus,we design the following time-varying delayed consensus protocol:

where K is the protocol gain to be designed,aij(t)is adjacency elements of interaction graph Gσ(t),and dij(t)is time-varying communication delays from agent j to i.Here,we shall focus on the case that for all∀i,j∈ Ni(t),the delays are uniform,i.e.dij(t)=d(t),which satisfies

Denote
Combining the above dynamic equations(1)–(3)yields the closed-loop stochastic multi-agent delay system as
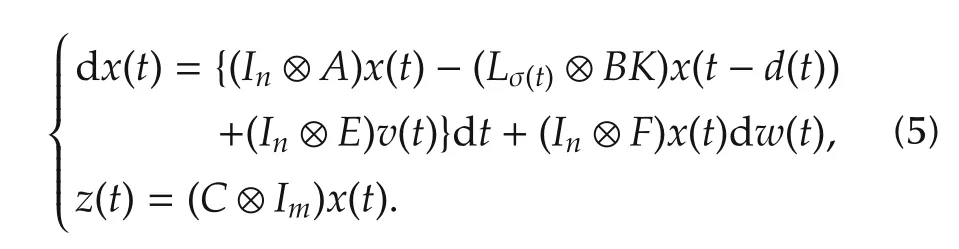
The switching signal σ(t)specifies at every time the index of the active subnetworks k∈Ξ.We assume that switching signal σ(t)has a finite number of discontinuities in any finite time interval,and there are no jumps in the state at the switching instants.Corresponding to the switching signal σ(t),we have the switching sequence{xt0:(it0,t0),(it0,t0),...,(it0,t0),...,ik∈Ξ},which means that the subsystem ikis activated when t∈[tk,tk+1).
Next,some concepts and Lemmas are described to facilitate the presentation and analysis of our results.
De finition 1The proposed protocol ui(t)is said to solve a mean-square exponential consensus problem for system(1)with disturbance vi(t)=0,if there exists constants k1>0 and k2>0,such that for all t≥t0,

De finition 2The agents in system(1)with vi(t)≠0 and output function zi(t)in(2)is said to be stochastically passive,if under zero initial condition,there exists a scalar passivity operator γ > 0 and a constant α > 0 such that

Remark 2Passivity analysis and passification[23–26]have been addressed for various linear or nonlinear systems including uncertain singular systems[27],switched systems[28],fuzzy systems[29]and complex networks[26].However,these two problems for stochastic multi-agent systems have not been well addressed due to the challenges of designing distributed passive consensus protocol with switching topology,time delays,external disturbances and stochastic noises.
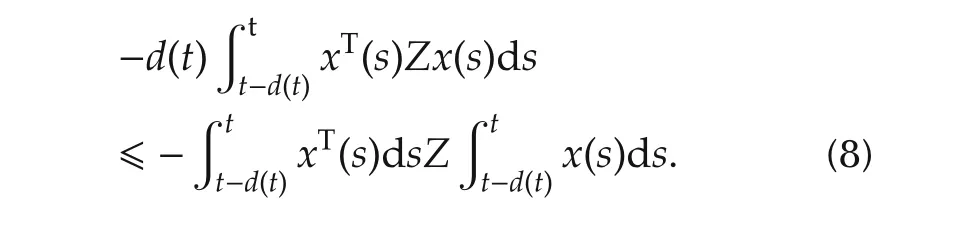
Lemma 3[36]For any constant matrix Z=ZT>0,scalar d(t)> 0 and vector function x(·):[−d(t),0]→ Rnmake the following Jensen’s integral inequality well defined:
Lemma 4(Schur complement)For a given symmetric matrix S with the form S=[Sij],S11∈ Rr×r,S12∈ Rr×(n−r),or S22∈ R(n−r)×(n−r),then S < 0 if and only if

3 Main results
In this section,we will consider passivity-based consensus analysis and passification for stochastic multiagent systems with switching topology.Specifically,the former is to obtain the delay-dependent sufficient condition to guarantee the closed-loop stochastic multi-agent system(5)is exponentially stable in mean-square sense and stochastically passive.The latter is to design the distributed delayed stochastic protocol(3)in order for establishing the solvability consensus conditions for passification.Next,we will present the main results for system(1)under two types of switching cases:arbitrary switching and switching with average dwell time.
3.1 Mean-square consensus and stochastic passivity under arbitrary switching
3.1.1 Passivity consensus analysis
Before presenting the main results,we denote λiσ(t)as the ith positive eigenvalue of matrix Lσ(t).Let i∗σ∗(t)and i∗σ∗(t)be the subscripts associated with the smallest and the largest nonzero eigenvalues of all Laplacian matrices Lσ(t),respectively.
Theorem 1Assume that the switching graph Gσ(t)are connected,and the matrix gain K of the consensus protocol(3)has been designed.For the given positive convergent operator α and passivity operator γ,the closed-loop system(5)is said to be exponentially stable in mean-square and stochastically passive if there exist positive definite matrices P>0,Q>0,Z>0 and a matrix T such that the following matrix inequality is satisfied for iσ(t)=i∗σ∗(t)and i∗σ∗(t):

where Φ11=PA+ATP+Q+ αP −τ−1e−ατZ,Φ12=−λiσ(t)PBK+ τ−1e−ατZ,and Φ22= − (1 − h)e−ατQ −τ−1e−ατZ.Moreover,an estimate of state decay is given by

ProofSee the appendix.
The following result is given when considering the topology of system(1)is a fixed one and the information exchange between agents is perfect,that is,there is no transmission delay from its neighbors’information.
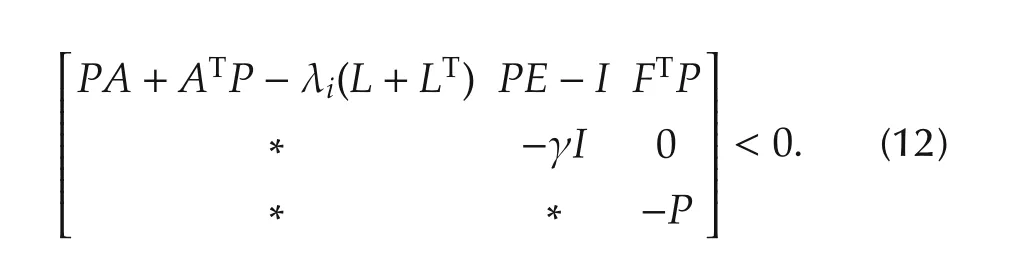
Corollary 1Consider system(1)with the fixed topology G whose Laplacian matrix is L.Let 0< λ1≤λ2≤ ...≤ λn−1be the positive eigenvalues of L.Given a passivity operator γ>0,the closed-loop system is mean-square asymptotically stable and stochastically passive if there exist a positive definite matrix P>0such that for i=1 and n−1,the following matrix inequality is satisfied with L=PBK.
ProofIt is similar to Theorem 1 and is omitted.
3.1.2 Passi fication
This section is devoted to addressing the passification problem of system(1).That is,we will further determine the passive feedback controller gain matrix K in
Theorem 2Consider system(1)with connected switching graph Gσ(t)and communication delay d(t).For the given positive operators α,γ and a positive constant β,if there exist positive definite matrices Y>0,˜Q>0,˜Z>0 and a matrix M such that for iσ(t)=i∗σ∗(t)and,the following LMI is satisfied:

ProofBy Theorem 1,it is noted that the closedloop system(5)is mean-square exponentially stable and stochastically passive if the condition(10)holds.Considering the design of controller(3),we will indicate that(13)implies(10).Since Y>0,performing a congruence transformation to(13)via(¯Y,¯Y,I,¯Y,¯Y)yields
Then,defining and substituting

into(15)leads to(10),which ensures the stochastically passive,and the proof is finished.
Remark 3Theorems 1 and 2 investigate the passivity consensus and passification problems for a class of stochastic linear multi-agent systems.The delay-dependent sufficient conditions are derived,under which the proposed passive consensus protocol achieves mean-square exponential consensus and stochastic passivity.In Theorem 1,−P(Lσ(t)⊗ BK)leads to a nonlinear matrix inequality(10)which is difficult to solve.In order to solve(10),a congruence transformation is performed to obtain the term −λσ(t)BM where M=KP−1.A positive scalar parameter β is introduced to decouple T and P.The parameter β needs to be selected so that τ˜Z−2βY<0,as indicated by(10)and(13).
Based on Corollary 1,the passification result is provided.
Corollary 2Consider system(1)with the fixed topology G whose Laplacian matrix is L.For γ>0,the corresponding closed-loop system is asymptotically stable in mean-square and stochastically passive if under the proposed passive consensus protocol(13),there exist a positive definite matrix Y>0,matrix M satisfying for i=1 and n−1,
ProofIt is similar to Theorem 2 and omitted.
3.2 Mean-square consensus and stochastic passivity under slow switching
The above results are derived from the case that the time-varying network topology is an arbitrary switching topology based on the common Lyapunov function(CLF)method.However,arbitrary switching can potentially destroy the stability of switched systems if the switches happen too frequently[38].Besides,as we all know,it is not easy to find a CLF to guarantee the switching system to be stable.And even,most switched systems do not possess a CLF.Hence,a time-dependent slow switching with its controlled switching signal being restricted on switching instants has drawn much attention[37,38].For such a type of switching,an average dwell time(ADT)method as one kind of multiple Lyapunov function(MLF)approach has been an efficient approach to obtain stability conditions of switched systems.The ADT method is developed based on the idea of dwell time which means the running time between the consecutive discontinuous switching instants is not smaller than a given positive constant Ta.Recently,it has been extensively employed to investigate the stability analysis and synthesis problems in control systems.Therefore,in the following,based on the ADT approach,we will consider the passivity consensus analysis and passification problems for the stochastic linear multi-agent systems(1)with average dwell time switching.
De finition 3[38] For a switching signal σ(t)and any T2≥T1≥0,let Na(T1,T2)denote the switching number of σ(t)over the interval(T1,T2).If there exist Taand N0such thatholds,then,Taand N0are called the average dwell time and the chattering bound,respectively.
Remark 4It is worth mentioning that from a control point of view,the fast switching property may not always desirable because it will probably shorten the working life of actuating mechanism,and sometimes fast switching is not allowed in real-world networks.From Definition 3,it can be seen that in any open interval,the number of discontinuities of switching signal σ(t)is bounded above by the length of the interval normalized by Taplus a chatter bound[38].Thus,arbitrarily fast switching is not allowed,which is natural in practice.
Next,we design a new consensus protocol with timevarying communication delay as

where σ(t)∈ Ξ,Kσ(t)is the controller gain.
Next,the passivity consensus analysis and passification problems under slow switching is given in two subsections.
3.2.1 Passivity consensus analysis
Theorem 3Consider theˆ Ito stochastic multi-agent delay system(1)with connected switching graph Gσ(t)and communication delay d(t).Assume that the matrix gain K of the above consensus protocol(18)has been designed.For the given operators α,γ and a constant μ≥1,if there exist positive definite matrices Pi>0,Qi>0,Zi>0 and matrix Tisuch that the following matrix inequalities are satisfied for iσ(t)=i∗σ∗(t)and i∗σ∗(t),


ProofChoose the piecewise Lyapunov function
When t∈[tk,tk+1),similar to the proof of Theorem 1 in the appendix,we can obtain
According to(22)and(23),at switching instant tk,it gives

Thus,it follows from(23),(24)and the switching number k=Na(t,t0)≤ (t−t0)/Tathat
Under zero initial condition,(25)yields

By virtue of Definition 3,it gives Na(0,s)≤s/Taand based on,we have Na(0,s)lnμ≤αs.Thus,multiplying both sides of(26)by e−Na(0,t)lnμand integrating from 0 to∞yields

In light of Definition 2,system(1)is stochastically passive.
Next,we consider the mean-square exponential stability of system(1)with v(t)=0,which means Γ(t)in(25)is zero.Therefore,we have

In addition,from(22),it is obtained that

Therefore,combining(28)and(29)yields

which according to(21),system(1)is mean-square exponentially stable and stochastically passive and proof is completed.
3.2.2 Passi fication
This section is devoted to addressing the passification problem of system(1)with the slow switching case.Similar to the result in Theorem 2,in the following,we will design the stochastic consensus protocol(19)under which system(1)can reach mean-square exponential consensus and stochastic passivity.
Theorem 4Consider theˆ Ito stochastic multi-agent delay system(1)with connected switching graph Gσ(t)and communication delay d(t).For the given positive scalars α,β,γ and μ ≥ 1,if there exist positive definite matricesand arbitrary matrix Misuch that for iσ(t)=i∗σ∗(t)and i∗σ∗(t),the following LMIs are satisfied:
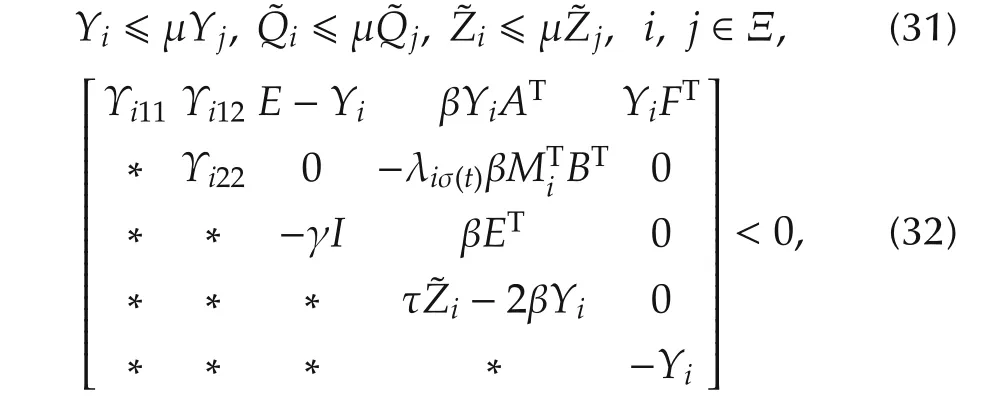

ProofThe proof is similar to Theorem 2 and omitted.
Remark 5Theorems 3 and 4 investigate the passivity consensus and passification problems ofˆ Ito stochastic linear multi-agent systems with switched network topology where the switching signal belongs to slow switching law.The difficulty is how to identify an average time to guarantee mean-square exponential consensus and stochastic passivity of system(1).Note that consensus may fail for this kind of switching topology,even though consensus can be reached for each individual topology.However,from Theorems 3 and 4,we can see that under the specified switching signal with the average dwell time(21),the passivity consensus and passification problems of system(1)are solved.
4 Simulations
In this section,numerical simulations are provided to demonstrate the effectiveness of the proposed results for a class of stochastic linear multi-agent systems with switching topoloyies and time-varying communication delay.
Consider a class of stochastic multi-agent systems(1)consisting of four agents with each one modelled by the following linear dynamics:
Then,the controlled output function zi(t),representing the state error of agent i relative to the average state of all agents,is defined as

It is assumed that all the nonzero weighting factors aij(t)are 1.The external disturbance is vi(t)=[0.1v(t)0.2v(t)0.3v(t)]Twith the energy-limited white noise v(t)=e−0.1tsin0.1πt.The initial conditions are given by x1=[−1 − 3 1]T,x2=[1 1.4 5]T,x3=[0 −2 −4.5]T,x4=[−4 4 0]T,and the passivity operator γ described as the dissipativity performance index is chosen as 1.
4.1 Mean-square consensus and stochastic passivity under arbitrary switching case
The switching network topologies(a)–(c)with four agents is shown in Fig.1 with the Laplacian matrices are given by
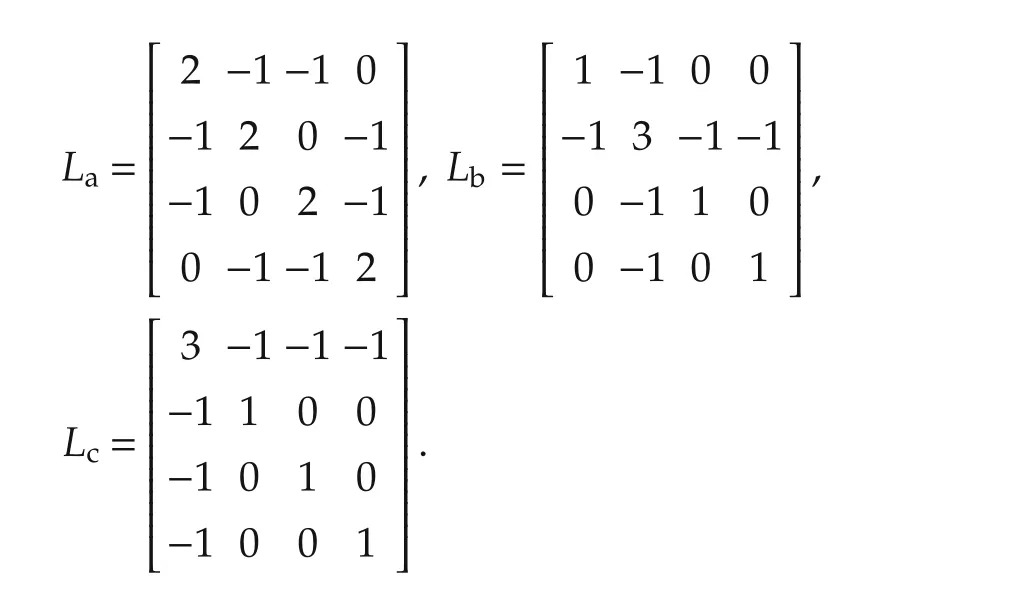
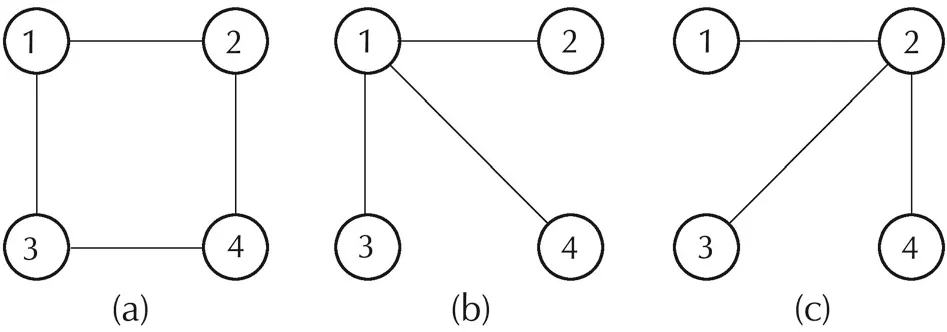
Fig.1 Switching graphs:(a)G1,(b)G2,(c)G3.
For given scalars α =0.2,β =0.3,and time-delay d=0.8,by utilizing LMI Toolbox[39],it follows from Theorem 2 and solving the LMI(13)can obtain the control gain K as follows:

The simulation results are shown in Fig.2–5 and we also have
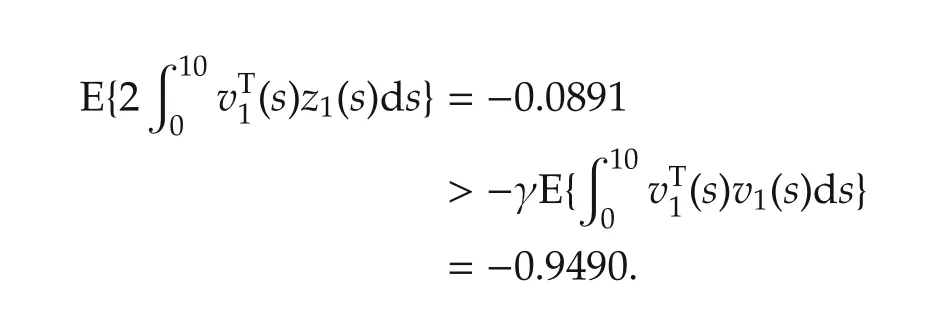
Moreover,by(11),the estimate of state decay is given by E{‖ξ(t)‖} ≤ 2.0862e−0.1(t−t0)E{‖ξ(t0)‖c}.Therefore,from the above results,it can be demonstrated that under protocol(3),the multi-agent system(1)can reach mean-square exponential consensus and stochastic passivity.
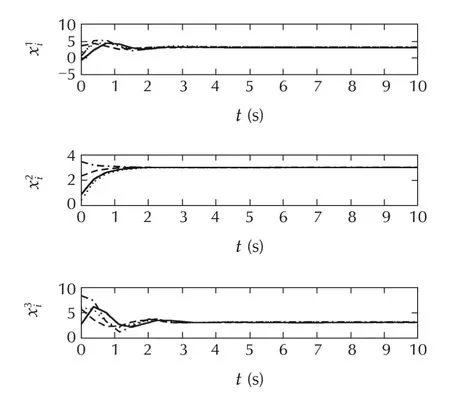
Fig.2 Stateswith protocol(3)under arbitrary switched case.
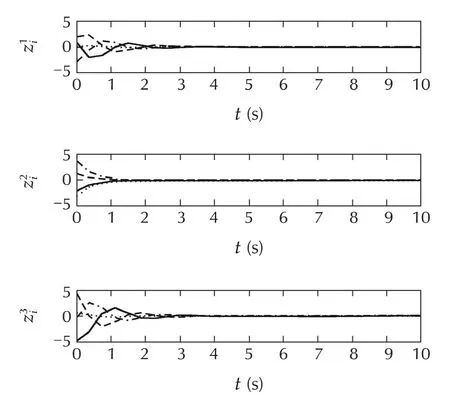
Fig.3 State outputswith protocol(3)under arbitrary switching case.
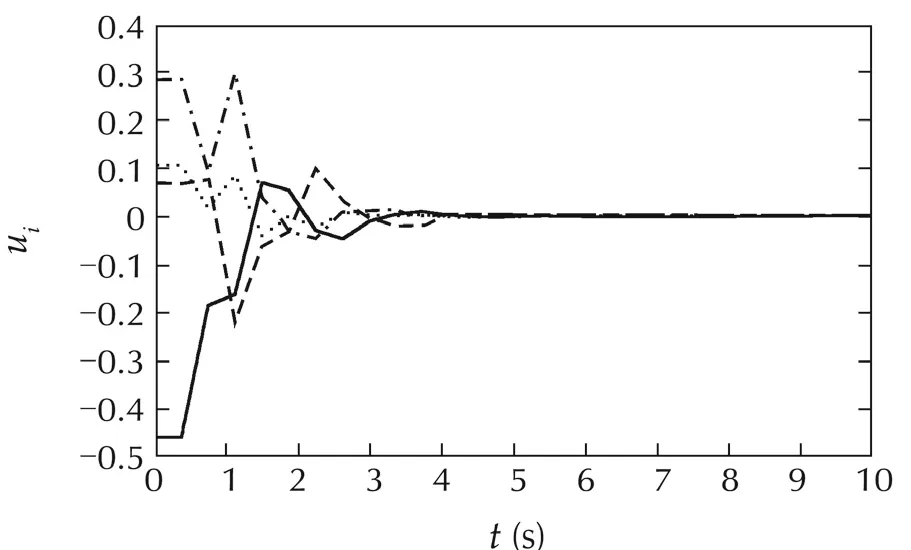
Fig.4 Input generated by protocol(3)under arbitrary switching case.
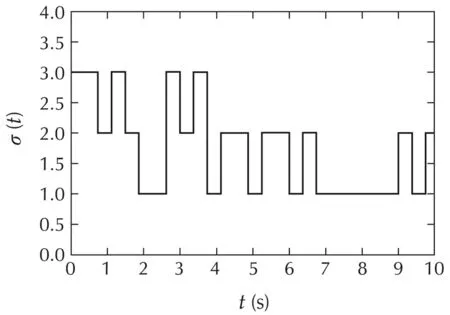
Fig.5 Switching signal σ(t)under arbitrary switching case.
4.2 Mean-square consensus and stochastic passivity under slow switching case
The switching network topologies is still given in Fig.1.For given scalars μ =1.05,α =0.2,β =0.3,and d=0.8,from Theorem 4,by solving the LMIs(31)and(32)gives the control gain Kias follows:

The simulation results are shown in Fig.6–9 and we also have
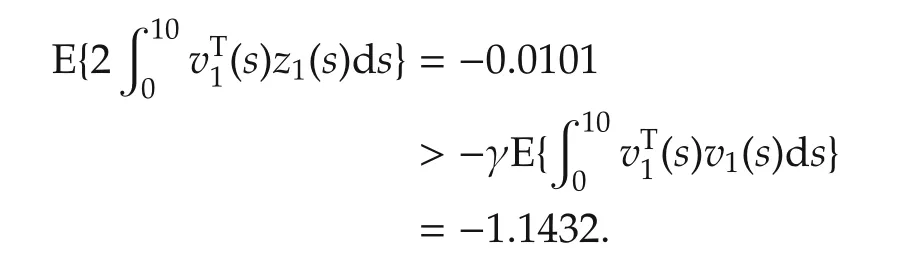
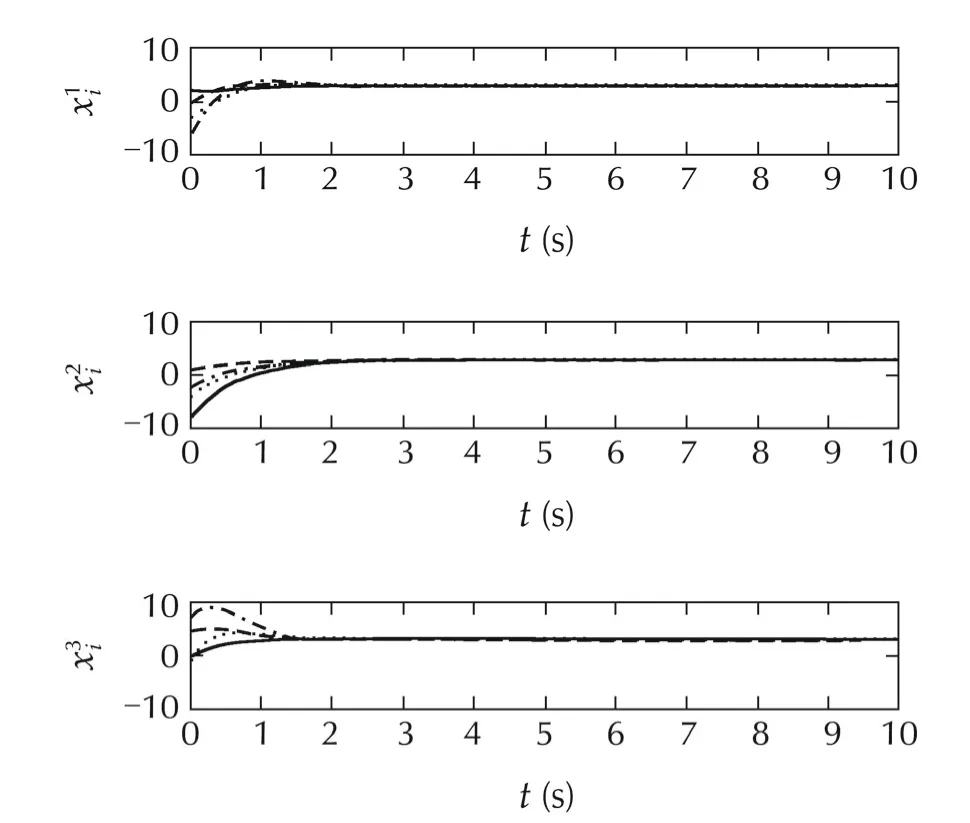
Fig.6 Stateswith protocol(18)under slow switching case.

Fig.7 State outputswith protocol(18)under slow switching case.
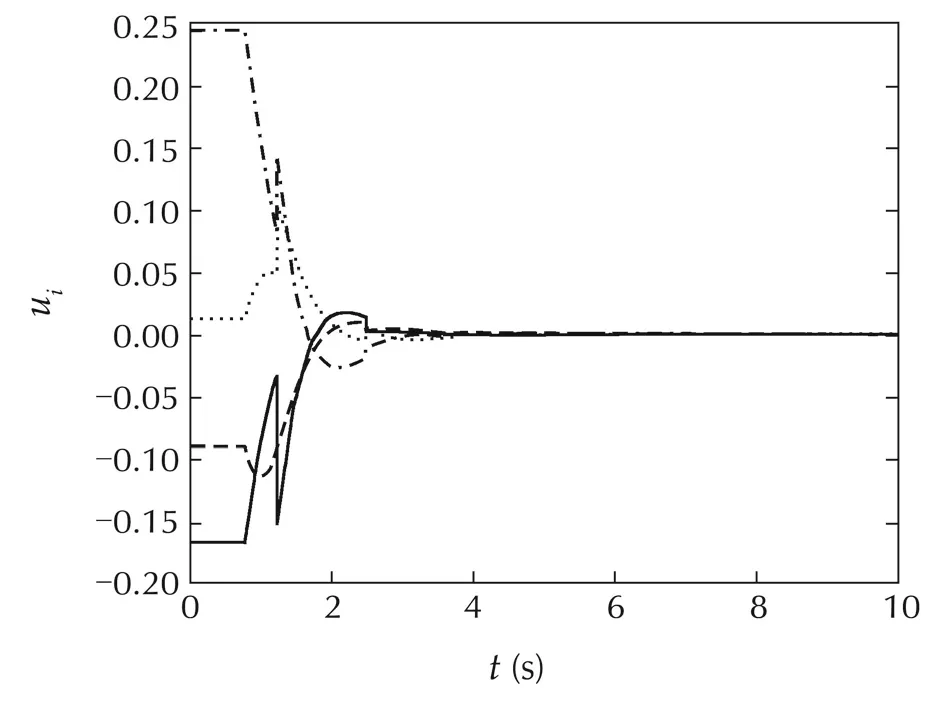
Fig.8 Input generated by protocol(18)under slow switching case.
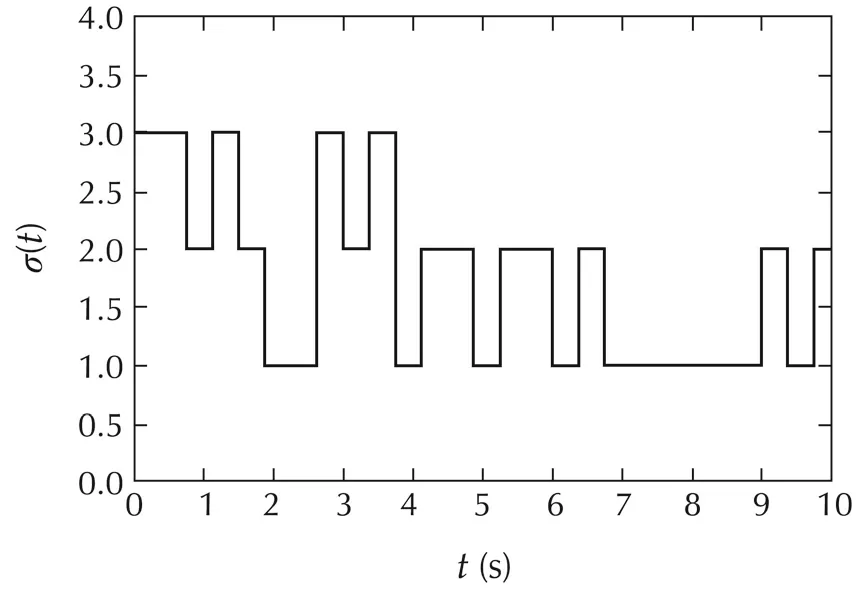
Fig.9 Switching signal σ(t)under slow switching case.
On the other hand,from(21),it also givesTaking Ta=1,then by(30),the estimate of state decay is given by E{‖ξ(t)‖} ≤1.9046e−0.3756(t−t0)E{‖ξ(t0)‖c}.Thus,the simulations results have shown that under the designed protocol(18),system(1)can reach mean-square exponential consensus and stochastic passivity.
5 Conclusions
In this paper,we investigated the passivity consensus analysis and passification problems for stochastic linear multi-agent systems with arbitrary and slow switching topologies.The distributed passive stochastic protocols containing the communication time-varying delays were designed to solve these two problems.By applying the Lyapunov function methods together with the approaches from passivity theory,stochastic theory,and algebraic graph theory,we established delay-dependent sufficient conditions under which the proposed protocols guaranteed mean-square exponential consensus and stochastic passivity.Then,for both switching cases,we designed system gain matrices by passification via solving the LMIs.Numerical simulations were provided to illustrate the effectiveness of the theoretical results.
[1]R.Olfati-Saber,R.M.Murray.Consensus problems in networks of agents with switching topology and time-delays.IEEE Transactions on Automatic Control,2004,49(9):1520–1533.
[2]W.Ren,R.W.Beard.Consensus seeking in multi-agent systems under dynamically changing interaction topologies.IEEE Transactions on Automatic Control,2005,50(5):655–661.
[3]Y.Hong,J.Hu,L.Gao.Tracking control for multi-agent consensus with an active leader and variable topology.Automatica,2006,42(7):1177–1182.
[4]G.Xie,L.Wang.Consensus control for a class of networks of dynamic agents.International Journal of Robust Nonlinear Control,2007,17(10):941–959.
[5] R.Olfati-Saber.Flocking for multi-agent dynamic systems:algorithms and theory.IEEE Transactions on Automatic Control,2006,51(3):401–420.
[6]R.Olfati-Saber,J.A.Fax,R.M.Murray.Consensus and cooperation in networked multi-agent systems.Proceedings of the IEEE,2007,95(1):215–233.
[7]W.Ren,R.W.Beard,E.M.Atkins.Information consensus in multivehicle cooperative control.IEEE Control Systems Magazine,2007,27(2):71–82.
[8]G.Lafferriere,A.Williams,J.Caughman,et al.Decentralized control of vehicle formations.Systems&Control Letters,2005,54(9):899–910.
[9] R.Olfati-Saber,J.S.Shamma.Consensus filters for sensor networks and distributed sensor fusion.Proceedings of the 44th IEEE Conference on Decision and Control,and the European Conference.Seville,Spain:IEEE,2005:6698–6703.
[10]H.Qing.Finite-time rendezvous algorithms formobile autonomous agents.IEEE Transactions on Automatic Control,2011,56(1):401–420.
[11]Y.Sun,L.Wang,G.Xie.Average consensus in networks of dynamic agents with switching topologies and multiple timevarying delays.Systems&Control Letters,2008,57(2):175–183.
[12]P.Lin,Y.M.Jia,L.Li.Distributed robust H∞consensus control in directed networks of agents with time-delay.Systems&Control Letters,2008,57(2):643–653.
[13]G.Hu.Robust consensus tracking of a class of second-order multi-agent dynamic systems.Systems&Control Letters,2012,61(1):134–142.
[14]L.Guo,X.Nian,H.Pan.Leader-following consensus of multiagent systems with switching topologies and time-delays.Journal of Control Theory and Applications,2013,11(2):306–310.
[15]J.Kuang,J.Zhu.On consensus protocols for high-order multiagent systems.Journal of Control Theory and Applications,2010,8(4):406–412.
[16]P.Lin,Y.Jia,S.Yuan.Distributed leadless coordination for networks of second-order agents with time-delay on switching topology.Proceedings of the American Control Conference.Seattle:IEEE,2008:1564–1569.
[17]J.Qin,H.Gao,W.Zheng.Second-order consensus for multiagent systems with switching topology and communication delay.Systems&Control Letters,2011,60(6):390–397.
[18]F.Jiang,L.Wang,G.Xie.Consensus of high-order dynamic multiagent systems with switching topology and time-varying delays.Journal of Control Theory and Applications,2010,8(1):52–60.
[19]H.Yang,Z.Zhang,S.Zhang.Consensus of second-order multiagent systems with exogenous disturbances.International Journal of Robust Nonlinear Control,2011,21(9):945–956.
[20]J.Hu,G.Feng.Distributed tracking control of leader¨Cfollower multi-agent systems under noisy measurement.Automatica,2010,46(8):1382–1387.
[21]Y.Liu,Y.Jia.Consensus problem of high-order multi-agent systems with external disturbances:an H∞analysis approach.International Journal of Robust and Nonlinear Control,2010,20(14):1580–1593.
[22]Z.Li,Z.Duan,G.Chen.On H∞and H2performance regions of multi-agent systems.Automatica,2011,47(4):797–803.
[23]J.C.Willems.Dissipative dynamical systems–Part I:general theory.Archive for Rational Mechanics and Analysis,1972,45(5):321–351.
[24]D.Hill,P.Moylan.The stability of nonlinear dissipative systems.IEEE Transactions on Automatic Control,1976,21(5):708–711.
[25]R.Lozano,B.Brogliato,O.Egeland,et al.Dissipative Systems Analysis and Control Theory and Application,London:Springer,2000.
[26]J.Yao,Z.Guan,D.J.Hill.Passivity-based control and synchronization ofgeneralcomplex dynamicalnetworks.Automatica,2009,45(9):2107–2113.
[27]L.Wu,W.Zheng.Passivity-based sliding mode control of uncertain singular time-delay systems.Automatica,2009,45(9):2120–2127.
[28]M.S.Mahmoud.Delay-dependent dissipativity analysis and synthesis of switched delay systems.International Journal Robust and Nonlinear Control,2011,21(1):1–20.
[29]J.Liang,Z.Wang,X.Liu.On passivity and passification of stochastic fuzzy systems with delays:the discrete-time case.IEEE Transactions on Systems,Man,and Cybernetics–Part B:Cybernetics,2010,40(3):964–969.
[30]M.Arcak.Passivity as a design tool for group coordination.IEEE Transactions on Automatic Control,2007,52(8):1380–1390.
[31]H.Bai,M.Arcak,J.T.Wen.Adaptive motion coordination:using relative velocity feedback to track a reference velocity.Automatica,2009,45(4):1020–1025.
[32]J.Yao,H.Wang,Z.Guan,et al.Passive stability and synchronization of complex spatio-temporal switching networks with time delays.Automatica,2009,45(7):1721–1728.
[33]Y.J.Igarashi,T.Hatanaka,M.Fujita,et al.Passivity-based attitude synchronization in SE(3).IEEE Transactions on Control Systems Technology,2009,17(5):1119–1134.
[34]T.Hatanaka,Y.J.Igarashi,M.Fujita,et al.Passivity-based pose synchronization in three dimensions.IEEE Transactions on Automatic Control,2012,57(2):360–375.
[35]L.Ma,X.Chen,H.Zhang.Passivity-based decentralized stabilization of multi-agent systems with uncertainty and mixed delays.Journal of Control Theory and Applications,2013,11(4):579–585.
[36]X.Zhu,G.Yang.Jensen integral inequality approach to stability analysis of continuous-time systems with time-varying delay.IET Control Theory and Application,2008,2(6):524–534.
[37]D.Liberzon,A.S.Morse,Baisc problems in stability and design of switched systems.IEEE Control System Maganize,1999,19(5):59–70.
[38]J.P.Hespanha,A.S.Morse.Stability of switched systems with average dwell time.Proceedings of the 38th IEEE Conference on Decision and Control.Phoenix:IEEE,1999,2655–2660.
[39]B.Boyd,L.E.Ghaoui,E.Feron,et al.Linear Matrix Inequalities in System and Control Theory.Philadelphia:SIAM,1994.
[40]R.Diestel.Graph Theory,Graduate Texts in Mathematics.New York:Springer,1997.
3 July 2014;revised 9 July 2014;accepted 9 July 2014
DOI10.1007/s11768-014-4096-9
†Corresponding author.E-mail:gqhu@ntu.edu.sg.Tel.:+(65)67904362;fax:+(65)67933318.
The work was supported by Singapore MOE AcRF Tier 1 Grant RG60/12(2012-T1-001-158).
©2014 South China University of Technology,Academy of Mathematics and Systems Science,CAS,and Springer-Verlag Berlin Heidelberg
Appendix
Proof of Theorem 1By Lemma 2,we denote

where ξ(t)andˆξ(t)describes the average disagreement states and the agreement states of all agents,respectively.
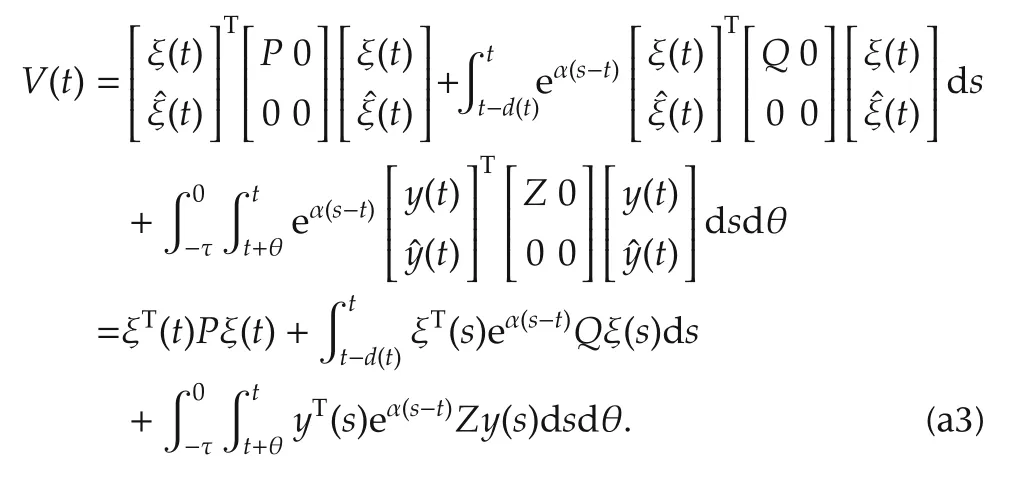
Choose a Lyapunov functional candidate
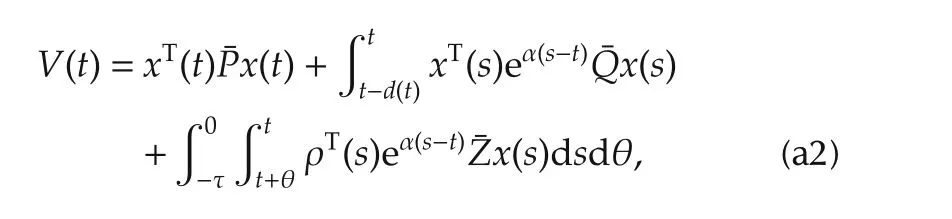
Thus,it can follow from(a2)that
The proof of Theorem 1 will be given in two steps where the stochastic passivity analysis is firstly considered for system(1)withand then the obtained passive result implies sufficient condition on mean-square exponentially consensus.
Step 1(Stochastic passivity) Considering system(5)by introducing the free-weighting matrix T yields
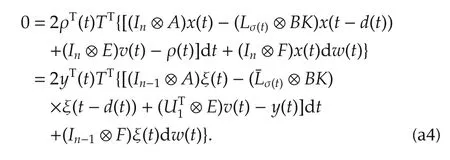
where

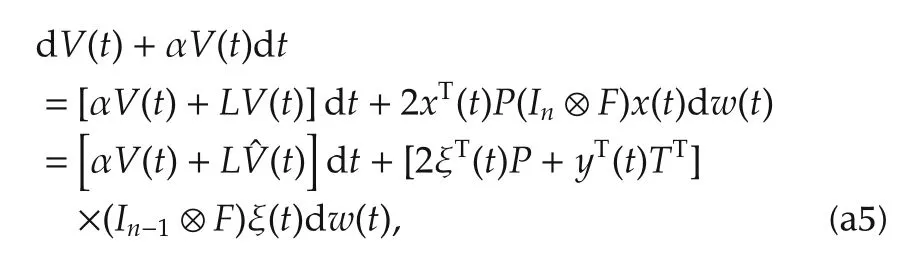
Thus,we further obtain that

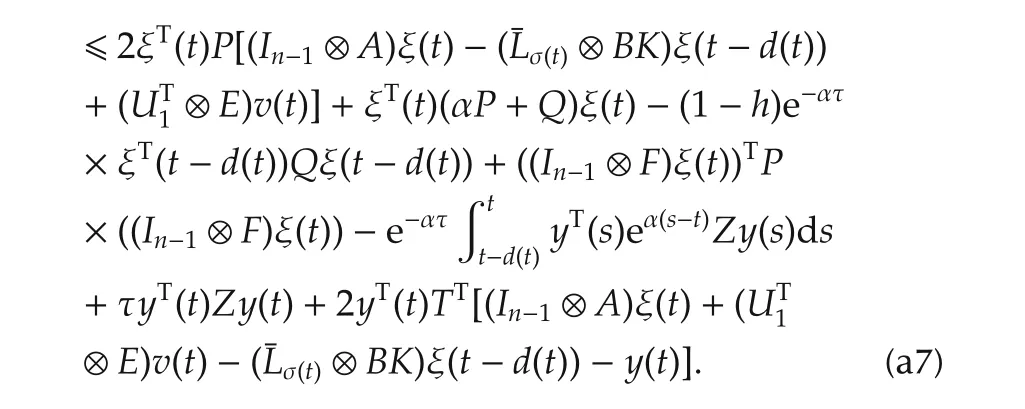
Combining(a7),Lemma 2,and(3)gives


Since interaction graphs Gσ(t)are all connected,matricesare positive definite by Lemma 2 and there exist orthogonal matrices U1∈ Rn×(n−1)such that

where λiσ(t),i=1,2,...,n − 1 are the positive eigenvalues of¯Lσ(t).Next,performing a congruence transformation to(a9)viayields

Then,by Lemma 4,(a11)is equivalent to the condition(10)in Theorem 1.Therefore,it follows from(a8)thatholds,which implies that

Substituting the above inequality into(a5)leads to

Integrating both sides of(a13)over t∈[tk,tk+1),and then taking expectation yields

Without loss of generality,we consider zero initial conditions and t0=0,(a14)can be written as

Since V(t)>0,it in turn gives the inequality in Definition 2,system(1)is stochastically passive.
Step 2(Mean-square exponential consensus)Next,we give the sufficient condition on mean-square exponential consensusforsystem(1)withv(t)=0.Similarto(a8)thefollowing inequality is obtained:


Following similar procedures in(a10)to(a11),it is not difficult to show that(10)implies Ψ<0.Then,LˆV(t)+αV(t)≤0.Thus,we can get

In addition,from(a3),it can be obtained that


Therefore,it can be obtained that the closed-loop multiagent system with v(t)=0 is mean-square exponentially stable.In addition,note that ξ(t)=(U1⊗ Im)Tx(t),thus,Definition 1 is satisfied,which implies that the multi-agent system(1)is able to reach exponential consensus in the mean square sense.The proof is completed.

Zhi FENGreceived his B.S.degree in Automation from Anqing Normal University,Anqing,China,in 2009 and M.S.degree in Control Engineering from Dalian University of Technology,Dalian,China,in 2012.He is currently a Ph.D.candidate with Nanyang Technological University,Singapore.His main research interests are switched systems,cooperative control of multi-agent systems,and stochastic control.E-mail:zfeng001@e.ntu.edu.sg.

Guoqiang HUreceived his B.Eng,M.Phil,and Ph.D.degrees from University of Science and Technology of China,the Chinese University of Hong Kong,and University of Florida,in 2002,2004,and 2007,respectively.He is currently an assistant professor in the School of Electrical and Electronic Engineering at Nanyang Technological University,Singapore.Prior to his current position,he was a postdoc research associate at University of Florida in 2008 and an assistant professor at Kansas State University from 2008 to 2011.His research interests include distributed control and optimization,multi-agent systems,visual servo control,and game theory,with practical applications to smart grid,smart buildings,and smart robots.He serves as Subject Editor for International Journal of Robust and Nonlinear Control,Associate Editor for Unmanned Systems,Asian Journal of Control,and the Conference Editorial Board of IEEE Control Systems Society.E-mail:gqhu@ntu.edu.sg.
 Control Theory and Technology2014年3期
Control Theory and Technology2014年3期
- Control Theory and Technology的其它文章
- Progressive events in supervisory control and compositional verification
- Introducing robustness in model predictive control with multiple models and switching
- Design of two-layer switching rule for stabilization of switched linear systems with mismatched switching
- On the ℓ2-stability of time-varying linear and nonlinear discrete-time MIMO systems
- A noninteracting control strategy for the robust output synchronization of linear heterogeneous networks
- A learning-based synthesis approach to decentralized supervisory control of discrete event systems with unknown plants