急救车载担架人工肌肉隔振系统特性分析
2014-12-05 11:54孙大刚梁培根
噪声与振动控制 2014年3期
高 蓬,孙大刚,梁培根,沈 毅
(太原科技大学 机械工程学院,太原 030024).
急救车担架的振动舒适性对于病人尤其是危重病人来说具有重要意义。目前很多急救车担架都是直接与车体相连,因此有必要对担架进行“二次隔振”,以提高病人的乘卧舒适性[1,2]。本文将气动人工肌肉应用于急救车担架缓冲装置上,建立仿生缓冲隔振平台,隔振平台直接与车厢底板固定相连,担架上车后,用固定装置可将其快速锁定到隔振平台上,以此来缓冲传递给病人的振动。缓冲担架在车厢内的布置和人工肌肉在担架隔振平台的布置如图1和图2所示。
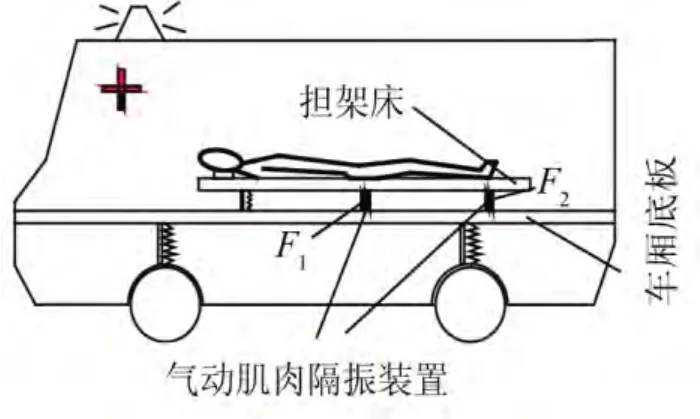
图1 急救车缓冲担架车厢布置
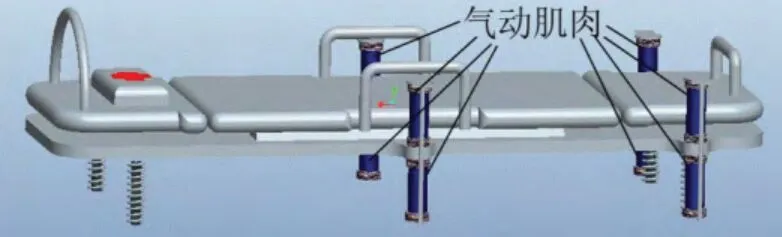
图2 PAM在缓冲担架的结构
气动人工肌肉(Pneumatic artificial muscle简称PAM)是由一段外部包裹着特殊纤维编织网的橡胶套筒和两端的接头连接组成的仿生学元件,如同生物肌肉那样可产生很强的收缩力,可制成一种新型仿生气动执行机构。其工作原理是:运用控制方法,控制执行机构对PAM充气,此时PAM因充气而膨胀,产生主动轴向拉力,而放气时则几乎无轴向力的产生,故PAM为一种单向主动力执行器,因此可利用其对振动进行主动控制。与其他缓冲机构相比,该机构具有以下优点[3—7]:构造简单;输出力/重量比大(收缩力为同直径气缸的10倍);无粘着、爬行现象;刚度可变、响应快、动作平滑;通过调节压力可实现中间定位。本文以PAM作为急救车仿生担架隔振平台的缓冲执行器,采用模糊PID控制方法,对车载担架的减振特性进行了研究。
1 PPAAMM力学特性
本文采用Wickramatunge的实验模型[8],将PAM视为变刚度的弹簧,充气收缩过程为硬刚度的弹簧,放气伸长过程为软刚度的弹簧。PAM轴向收缩力Fe和气压p、伸长量ls以及刚度k的函数关系式为

式中k为PAM刚度,N/m;ls为PAM伸长量,m;p为PAM充气压力,MPa。c0、c1、c2、c3为k与p和ls函数关系的系数。
考虑橡胶套筒的弹性力作用,弹性力Fs为

式中D0、l0、θ0分别为PAM的初始直径,mm;初始长度,mm;初始纤维角度,°。E为橡胶筒弹性模量,MPa;t为 PAM 橡 胶 筒 壁 厚 ,mm;,ε=1-l/l0为PAM收缩率,l0为PAM自由长度。单个PAM输出力为

2 PPAAMM担架及模型建立
2.1 PPAAMM担架结构及缓冲减振机理

图3 PAM收缩舒张示意图
急救车的行驶路面绝不限于城市的街道,尤其在偏远山区的道路上行驶将会对病人的身体造成更大影响;不仅要在城市街道上经历多次减速带的颠簸,更要承受山区不可预知的路况。有关资料表明,车身俯仰角振动比侧倾角振动大得多,对轴距小、车身刚度较高的车辆来说,车身的扭转和弯曲振动影响不大,因此本文仅考虑车身及担架的垂向振动和俯仰角振动。由于PAM只产生收缩力而无轴向伸张力,因此采用PAM机构在担架平台上下对称布置的对拉形式。
随着从地面传至担架的激励作用,担架台上的加速度传感器将实时测量质心加速度的变化,角加速度传感器测量俯仰角加速度的变化,将垂向加速度和俯仰加速度的变化传至控制系统,控制系统通过执行机构控制指定的PAM或充气收缩或放气伸长。床中部的上下两组PAM充气或放气产生主动力F1来控制垂向加速度的变化,床尾上下两组PAM充气或放气产生主动力F2来控制俯仰角加速度的变化,图3为PAM收缩舒张示意图。由于质心垂向加速度和俯仰角加速度的同时存在,床中部和床尾的PAM会同时工作,故通过床头和床尾的PAM联合作用,会有效缓冲担架质心的垂向振动和俯仰角振动,提高病人的舒适度。
2.2 PPAAMM缓冲担架模型的建立
假设:
1)PAM膨胀后的形状为理想圆柱体;
2)忽略橡胶层厚度的影响;
3)气体流动过程为等熵绝热过程;4)担架系统是一个对称于纵向平面的线性系统;
5)急救车其他人员及设备质量均归为车身质量上;
6)车架、担架等均为刚体,人体与担架一起运动。基于以上假设,建立了PAM担架—车辆振动二分之一模型(见图4)。
图中,m1、m2为非簧载质量,m3为簧载质量,m4为担架与人体质量;k1、k2为轮胎刚度,k3、k4为悬架刚度,k5、k6为担架刚度;c1、c2为悬架阻尼,c3、c4为担架阻尼;q1、q2为路面激励;z1、z2分别为前后车轮位移,z3为车身位移,z4为担架位移;θ1、θ2分别为车身及担架俯仰角;F1和F2为PAM主动输出力;a、b为车身质心距前后支承的距离,a'、b'为担架质心距其前后支承距离,l1、l2为车身质心距担架前后支承的距离,l3为车身质心和担架质心的距离。
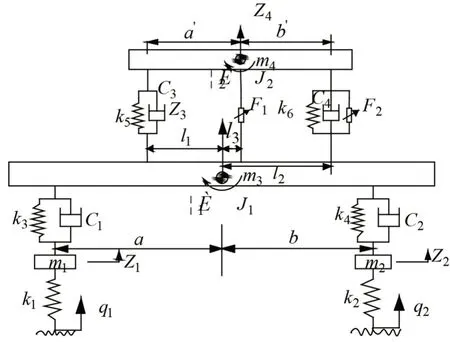
图4 PAM担架力学模型
根据模型得振动微分方程为

式中[M]为质量矩阵,[C]为阻尼矩阵,[K]为刚度矩阵。
3 仿真及分析
3.1 模糊PPIIDD自适应控制
考虑到PAM的非线性,本文采用模糊自整定PID算法对其进行控制[9]。在设计急救车担架缓冲装置控制器时,为提高伤病员受振舒适性,应尽量使伤病员承受垂直振动负荷较小;同时,由于病人为卧姿状态,故应尽量保证人体承受俯仰振动冲击较小。因此,设计了两个模糊控制器,一个是将担架质心处垂向速度Z'4及其变化率Z"4作为输入,kp1、ki1、kd1为输出;另一个是以担架俯仰角速度θ'2及其变化率θ"2作为输入,kp2、ki2、kd2作为控制器输出。模糊控制器的输入误差量e、误差变化量ec和模糊控制器输出均取7个语言值,即负大(NB)、负中(NM)、负小(NS)、零(Z0)、正小(PS)、正中(PM)、正大(PB)。输入输出变量的隶属度函数选为高斯型隶属度函数,其表达式为

式中σ取为0.6。
第一个模糊控制力为

第二个模糊控制力为式中a为担架垂向加速度,a0为理想担架垂向加速度,取值为0;α为担架俯仰角加速度,α0为理想担架俯仰角加速度,取值也为 0;kp1、ki1、kd1、kp2、ki2、kd2为PID最终控制参数;kp0、ki0、kd0为初始设定参数,为保证控制系统的稳定性,根据试凑法,分别取600、120、3;µ1、µ2为模糊控制器输出量;λp1、λi1、λd1、λp2、λi2、λd2为修正系数。模糊推理使用Mamdani法,解模糊判决用bisector法,控制规则采用专家经验。
3.2 路面激励
以白噪声产生的路面谱作为车辆行驶时的路面输入[10],则

式中q-路面位移;f0-下截止频率;U0-测量车速;G0-路面不平度系数;W(t)-均值为零的高斯白噪声。
根据路面功率谱密度,GB7031-1987《车辆振动输入-路面不平度表示方法》将路面分为8个等级,用Matlab/Simulink仿真软件可以构造出积分白噪声模型。
3.3 仿真系统设计与仿真分析
选用Festo公司MAS-20-N300-AA-MCHK型气动肌肉为仿生担架所用PAM机构。其主要参数为:l0=0.3 m,D0=0.02 m,θ0=20°,最大工作载荷为 1 500 N,最大收缩率为额定长度的25%.担架及车辆参数为:m1=60 kg,m2=72 kg,m3=1.6×103kg,m4=95 kg,k1=1.6×105N/m,k2=1.5×105N/m,k3=3.2×104N/m,k4=2.6×104N/m,k5=5×103N/m,k6=1×104N/m,c1=1×104N·s/m,c2=1×104N·s/m,c3=500 N·s/m,c4=500 N·s/m,j1=9 060 kg·m2,j2=98 kg·m2,a=2.1 m,b=2.4 m,a'=0.8 m,b'=1.3 m,l1=0.2 m,l2=1.9 m,l3=0.6 m。
根据急救车的实际工作状况,选择B级路面,D级路面,B级路面过减速带作为车辆行驶路面,对应车速分别为65、36、18 km/h,代表急救车城市行驶、山区行驶以及特殊路况行驶3种典型工况。分析加装PAM后与被动情况下担架的垂向加速度和俯仰角加速度的时域曲线,如图5,6所示。
图5及表1可知,在选定的三种工况下,PAM担架比传统担架垂直加速度的振幅最大值分别减小了48.8%、48.8%和73.4%,最小值分别减小了54.1%、54.1%和68.8%,标准差分别减小了48.8%、48.82%和59.6%。
对比图6及表1可知,对于俯仰角加速度,对应三种工况下,振幅最大值分别减小了58.1%、58.1%和73.9%,最小值分别减小了59.6%、59.3%和72.5%,标准差也分别减小了51.4%、51.45%和49.1%。
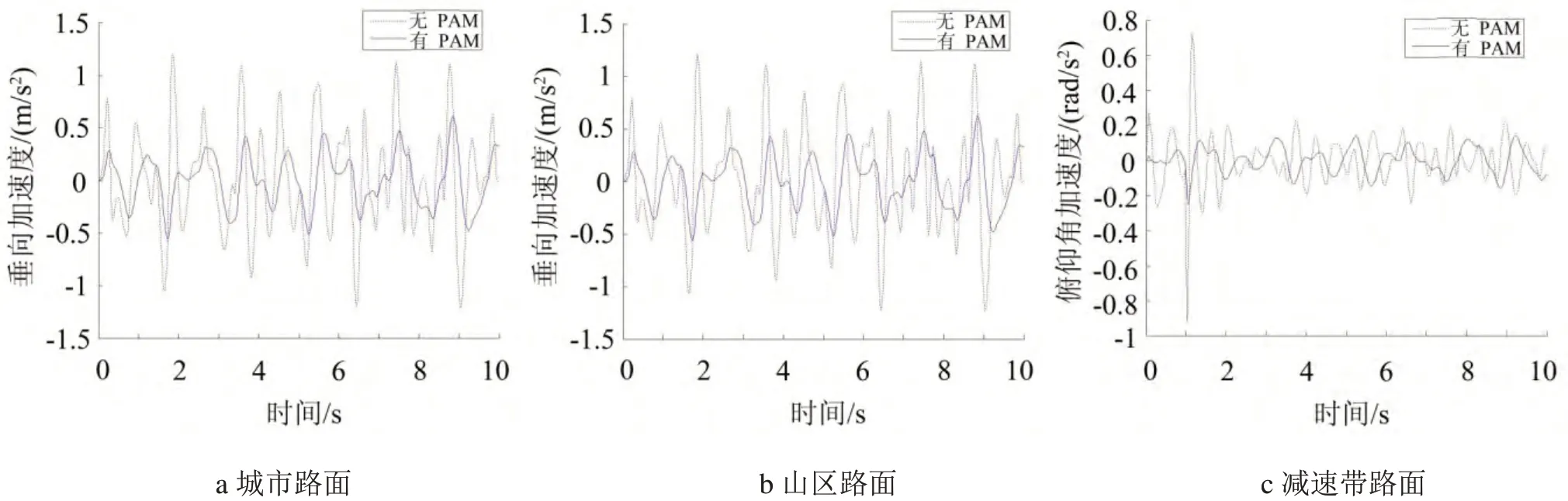
图5 三种工况下担架垂向加速度对比
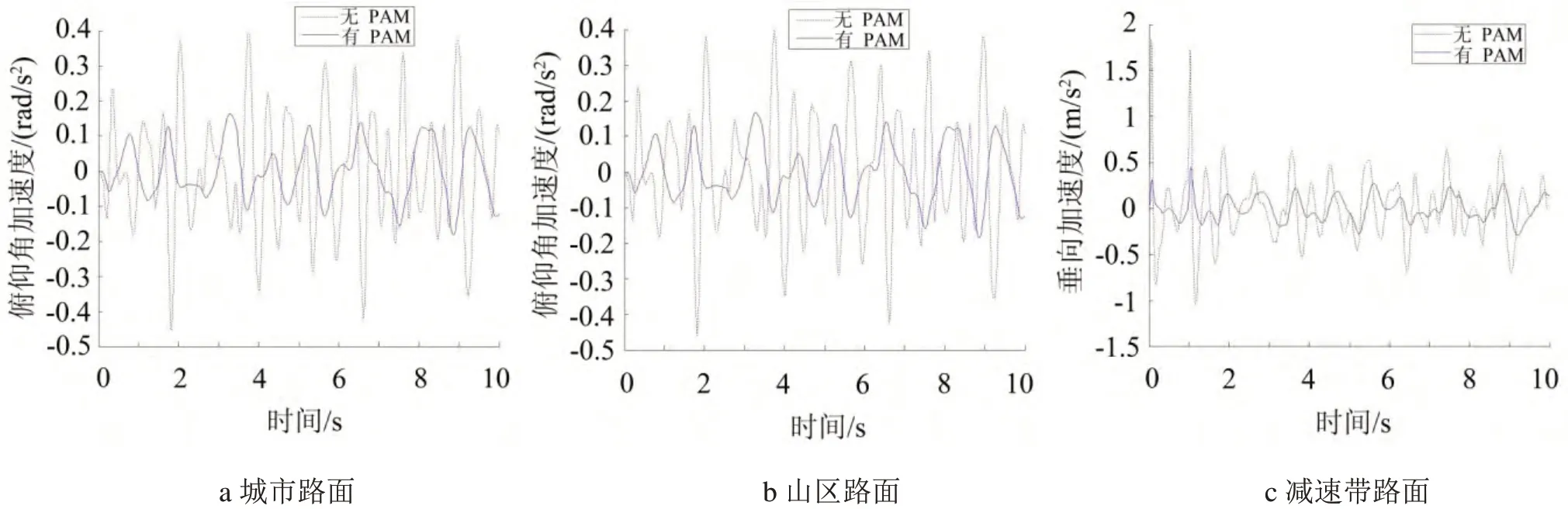
图6 三种工况下担架俯仰加速度对比
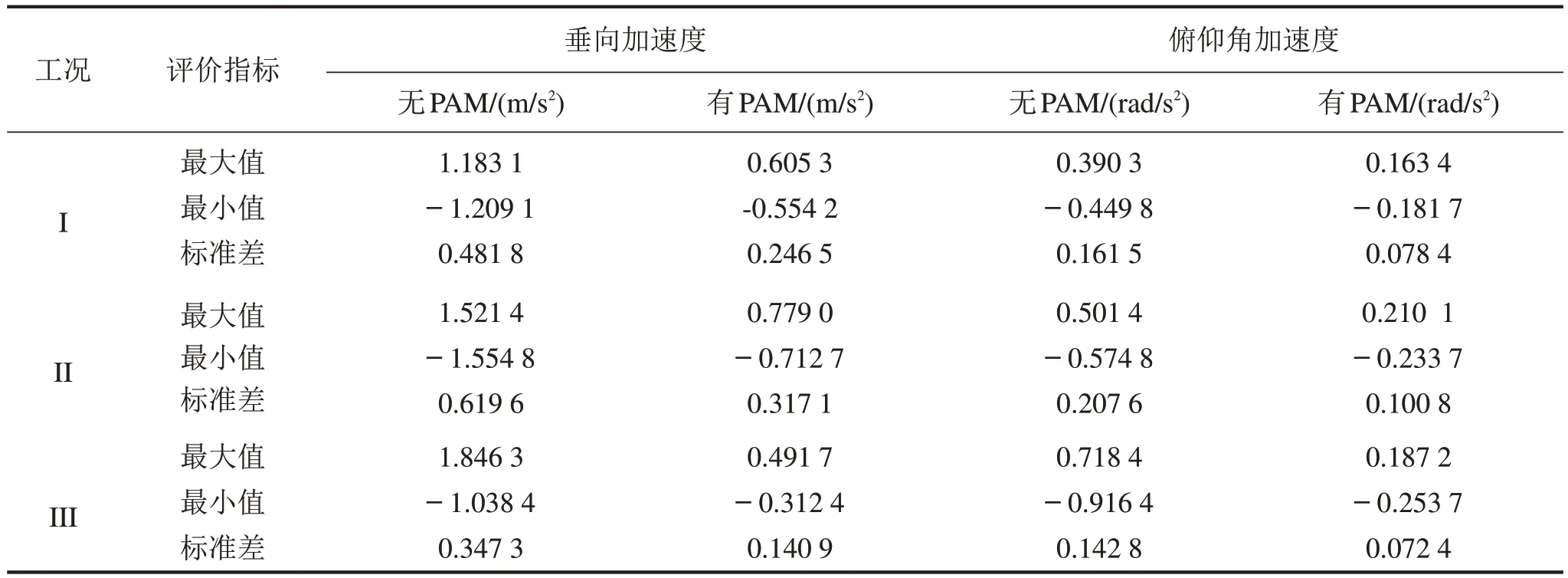
表1 仿真结果
由图5及图6中对比可知,加装PAM后,担架的垂向加速度和俯仰角加速度的总体变化更为平缓,这与PAM良好的柔顺特性有关。
综上所述:PAM仿生担架隔振平台可有效缓冲路面传至病人的振动冲击,对于选定的3种工况,垂向加速度与俯仰角加速度的振幅均有大幅度的衰减,明显提高了乘卧病人的受振舒适性。对于B级路面过减速带这种特殊工况,在急救车前轮和后轮分别通过减速带的瞬时,担架垂向加速度和俯仰加速度振幅都经历了尖峰突变,使病人承受了巨大的冲击;而加装PAM后,在过减速带的瞬时,担架的垂向加速度以及俯仰角加速度振幅衰减尤为明显,有效缓冲了担架人体所承受的瞬时冲击,提高了病人的舒适度。
4 结语
(1)本文尝试将PAM应用于急救车车载担架隔振平台,建立担架振动力学模型,采用智能模糊PID控制,经simulink仿真分析表明,PAM仿生担架隔振平台可有效缓冲路面激励传至担架及病人的振动与冲击,提高了卧姿病人的乘卧舒适性。
(2)表明建立的担架-车辆振动系统合理可行,验证了自适应模糊PID控制运用于担架非线性控制具有一定的效果。
(3)PAM作为担架隔振平台主动减振的执行器,以其具有良好的动态特性以及动作平滑、柔性好、响应快等优点,可为急救车担架的设计提供一定的参考。
[1]王 猛,徐新喜,任旭东.某型急救车担架台隔振特性仿真分析与优化设计研究[J].振动与冲击,2008,27(8):77-80.
[2]孙景工,牛 福,高振海,等.基于磁流变隔振技术的某型越野救护车乘卧舒适性试验与分析[J].噪声与振动控制,2009,29(6):156-160.
[3]Klute G K,Czerniecki J,Hannaford B.McKibben artificial muscles:pneumatic actuators with biomechanical intelligence.In:Proceedings of the IEEE/ASME international conference on advanced intelligent mechatronics,1999:221-226.
[4]Ahn K K,Thanh T U D C.Improvement of the control performance of pneumatic artificial muscle manipulators using an intelligent switching control method[J].KSME International Journal,2004,18(8):1388-1400.
[5]Ahn K K,Anh H P H.Design and implementation of an adaptive recurrent neural networks(ARNN)controller of the pneumatic artificial muscle(PAM)manipulator[J].Mechatronniiccss,,2009,19(6):816-828.
[6]隋立明,张立勋.气动肌肉与气缸的特性对比研究[J].液压与气动,2011,11:99-102.
[7]隋立明,王祖温,包 钢.气动肌肉与生物肌肉的力学特性对比研究[J].机床与液压,2004,06:22-24.
[8]Wickramatunge K C,Leephakpreeda T.Study on mechanical behaviors of pneumatic artificial muscle[J].International Journal of Engineering Science,2010,48(2):188-198.
[9]陈 兵,曾 鸣,尹忠俊.车辆半主动悬架的模糊控制策略设计与仿真研究[J].系统仿真学报,2008,20(2):420-424.
[10]刘 伟,刘大维,陈焕明,符朝兴.基于联合仿真的半主动悬架车辆行驶平顺性研究[J].农业机械学报,2009,06:16-22.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
环球时报(2022-04-28)2022-04-28
北京航空航天大学学报(2021年4期)2021-11-24
军事文摘·科学少年(2021年6期)2021-06-24
环球时报(2020-12-08)2020-12-08
工业设计(2020年3期)2020-05-14
中国惯性技术学报(2019年6期)2019-03-04
作文与考试·初中版(2016年2期)2016-01-06
中国卫生产业(2015年20期)2015-01-04
航天器工程(2014年5期)2014-03-11