
通用航空综合运行支持流程设计
2014-11-27 02:03吴仁彪王晓亮
中国民航大学学报 2014年3期
吴仁彪,王 鹏,王晓亮
(中国民航大学智能信号与图像处理天津市重点实验室,天津 300300)
通用航空是民航事业的两翼之一,在国家经济社会建设中具有不可替代的作用[1]。中国民用航空局印发的《关于加快通用航空发展的措施》明确指出要科学规划通用航空发展,推动空域保障环境的改善,促进通用航空快速发展[2]。
随着中国在低空空域管理改革方面的深入,低空空域管理政策法规相继出台,极大地促进了中国通用航空事业的发展,但目前尚没有制定明确的通用航空综合运行支持流程。本文根据航空器跨越的空域种类将飞行拆分成若干基本场景进行流程设计,实际飞行将是若干基本场景的组合。
1 通用航空综合运行支持流程设计依据
1.1 空域划分
国务院、中央军委发布的《关于深化我国低空空域管理改革的意见》(以下简称《改革意见》)中将低空空域分为管制空域、监视空域和报告空域3类[3]。管制空域通常划设在飞行比较繁忙的地区,以及机场起降地带、空中禁区、空中危险区、空中限制区、地面重要目标、国(边)境地带等区域的上空。监视空域通常划设在管制空域周围。报告空域通常划设在远离空中禁区、空中危险区、空中限制区、国(边)境地带、地面重要目标以及飞行密集地区、机场管制地带等区域的上空[4]。各类低空空域垂直范围原则为真高1 000 m以下,可根据不同地区特点和实际需要,具体划设低空空域高度范围。
1.2 空域职责
《改革意见》中规定了各空域的职责:“管制空域,航空用户申请飞行计划,空管部门掌握飞行动态,实施管制指挥;监视空域,航空用户报备飞行计划,空管部门监视飞行动态,提供飞行情报和告警服务;报告空域,航空用户报备飞行计划,向空管部门通告起飞和降落时刻,自行组织实施,空管部门根据用户需要,提供航行情报服务。”
1.3 中心服务站及远端站
中国拟建立由中心服务站和远端站共同组成的通用航空综合运行支持系统。远端站完成通用航空飞行目标监视信息获取及地空通信保障。中心服务站利用远端站提供的低空空域监视信息对通用航空中执行飞行任务的各类通用航空器进行监视并为其提供必要服务。
2 通用航空综合运行支持流程设计
2.1 空域责任主体
《改革意见》发布时国内还没有明确提出中心服务站的概念,本文结合《改革意见》中关于空域职责的规定以及中心服务站的功能,参照美国通用航空飞行服务站的运行方式,初步设计了各个空域的责任主体。
管制空域的责任主体是空管部门,由空中交通管制员提供飞行服务,具有监视、通信功能。管制空域内,航空用户申请飞行计划,空中交通管制员掌握飞行动态,实施管制指挥。监视空域的责任主体是中心服务站,由中心服务站监控服务员提供飞行服务,具有监视、通信功能。监视空域内,航空用户报备飞行计划,中心服务站监控服务员监视飞行动态。报告空域的责任主体是中心服务站,由中心服务站报告服务员提供飞行服务,具有通信功能,绝大部分报告空域不具备监视功能。报告空域内,航空用户报备飞行计划,向中心服务站报告服务员通告起飞和降落时刻,自行组织实施。
2.2 飞行跨越空域种类
根据空域划设规则及飞行过程中跨越的空域种类,将飞行划分为3种类型:无跨越空域(如图1线1、2、3所示)、跨越 2种空域(如图 1线 4、5、6、7所示)、跨越3种空域(如图1线8、9、10所示)。

图1 飞行跨越空域种类示意图Fig.1 Schematic diagram of airspace acrossing type
根据飞行中跨越的空域种类可将飞行过程拆分成如下基本场景:管制空域起降、监视空域起降、报告空域起降、管制空域到监视空域、监视空域到报告空域、报告空域到报告空域、报告空域到监视空域、监视空域到管制空域。实际飞行将是以上基本场景的组合,如航空器从管制空域起飞,报告空域降落,途经管制空域、监视空域及报告空域,则该航空器飞行流程可由管制空域起飞、管制空域到监视空域、监视空域到报告空域、报告空域降落4种基本场景组合而成。
图1中连线表示跨越的空域,不代表真实的飞行路径。图1只是例举了一个简单的场景,实际场景会更复杂,但飞行一般可划分为如上3种类型,拆分成上述基本场景。
2.3 飞行计划状态
飞行计划状态的变更反映了航空器飞行过程中相应事件的发生[5]。通用航空综合运行支持流程主要体现为计划状态在不同条件下的改变。根据通用航空在低空空域飞行的特点,本文对中国运输航空中已有的飞行计划状态进行了适当的简化及重新设计。本文所设计的通用航空飞行计划状态包括未激活(NACT)、预激活(PREA)、协调(COOR)、激活(ACTV)、移交(HND)、结束(FIN)。
2.4 通用航空综合运行支持基本场景运行流程
当航空器在管制空域中飞行时,假设航空器具有ADS-B、GPS、VHF收发机、二次雷达应答机,远端站具有二次雷达、红外监视设备、ADS-B、VHF收发机。当航空器在监视空域中飞行时,假设航空器具有ADSB、GPS、VHF收发机,远端站具有低空监视雷达、红外监视设备、ADS-B、VHF收发机。当航空器在报告空域中飞行时,假设航空器具有GPS、VHF收发机,远端站具有VHF收发机。
2.4.1 航空器起飞
航空器起飞包括航空器从管制空域起飞、监视空域起飞及报告空域起飞3种基本场景。
航空器从监视空域起飞,假设起飞机场为A点,如图2(a)所示。飞行沿途各管制部门、中心服务站接到计划审批部门发送的领航计划(FPL)报之后生成一个未激活状态的飞行计划并将飞行计划预处理。预计起飞前 30 min(30为可变系统参数(VSP)),起飞机场所在中心服务站将此飞行计划变更为预激活状态。
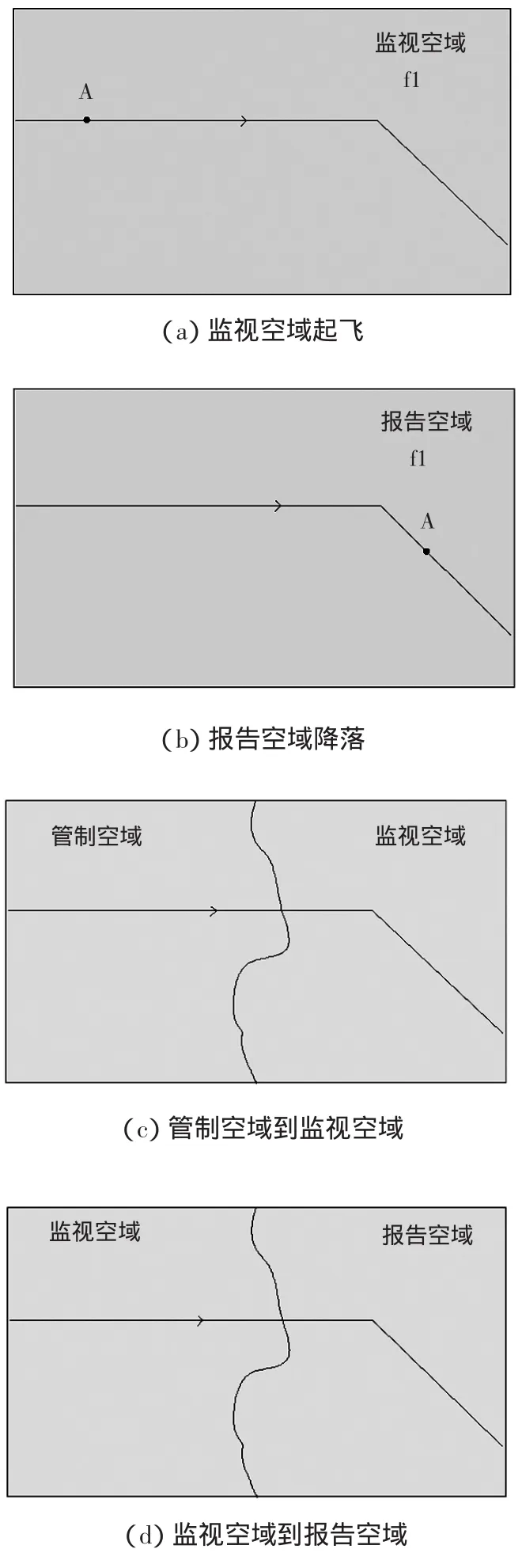
图2 飞行场景示意图Fig.2 Flight scene diagram
航空器起飞前,中心服务站监控服务员与飞行员进行人工协调,飞行计划状态变更为协调状态。监视空域雷达探测到目标后,飞行计划与雷达目标相关,飞行计划状态变更为激活状态,中心服务站系统向沿途各部门发送起飞(DEP)报,同时向系统内部发送消息,各管制部门、中心服务站根据实际起飞时间重新进行航迹估算。此时航空用户在监视空域飞行,接受监控服务员服务,其流程如图3所示。
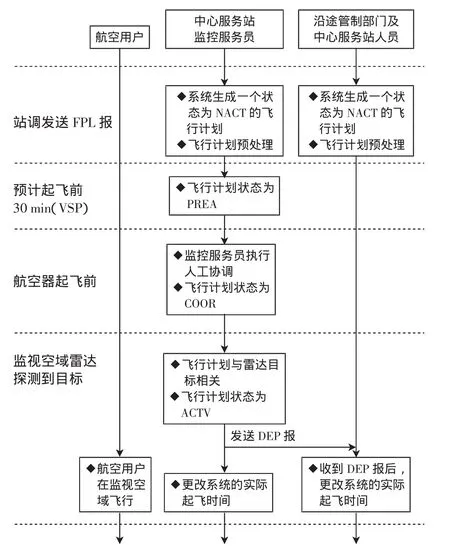
图3 监视空域起飞流程图Fig.3 Flow diagram of taking off from monitoring airspace
航空器从管制空域起飞与航空器从监视空域起飞综合运行支持流程相同。航空器从报告空域起飞与航空器从监视空域起飞综合运行支持流程略有不同,其主要区别在于报告空域中没有监视设备,无法显示航迹,飞行计划与航迹无法相关,航空用户必须向中心服务站通告起飞时刻,中心服务站报告服务员在接到航空用户报告后,飞行计划状态变更为激活状态。
2.4.2 航空器降落
航空器降落包括航空器从管制空域降落、监视空域降落及报告空域降落3种基本场景。
航空器从报告空域降落,假设降落机场为A点,如图2(b)所示。航空器降落后,航空用户联系中心服务站报告服务员告知降落。中心服务站系统向沿途各部门发送落地(ARR)报,同时向系统内部发送消息。此时中心服务站系统停止对该飞行计划的航迹估算,飞行计划变更为结束状态。沿途各部门接到ARR报后不做处理,其流程如图4所示。若航空器未按规定时间关闭飞行计划,则中心服务站将产生未按规定时间关闭飞行计划的警告。中心服务站服务人员看到警告后与报告区降落机场联系,若航空器已在机场降落,表明航空器安全着陆但未关闭飞行计划,则将对航空用户进行相应处罚;若降落机场未发现该航空器,表明该航空器可能出现意外,此时中心服务站人员将该航空器最后报告位置提供给相关部门进行搜救。
航空器从管制空域、监视空域降落与航空器从报告空域降落综合运行支持流程相同。
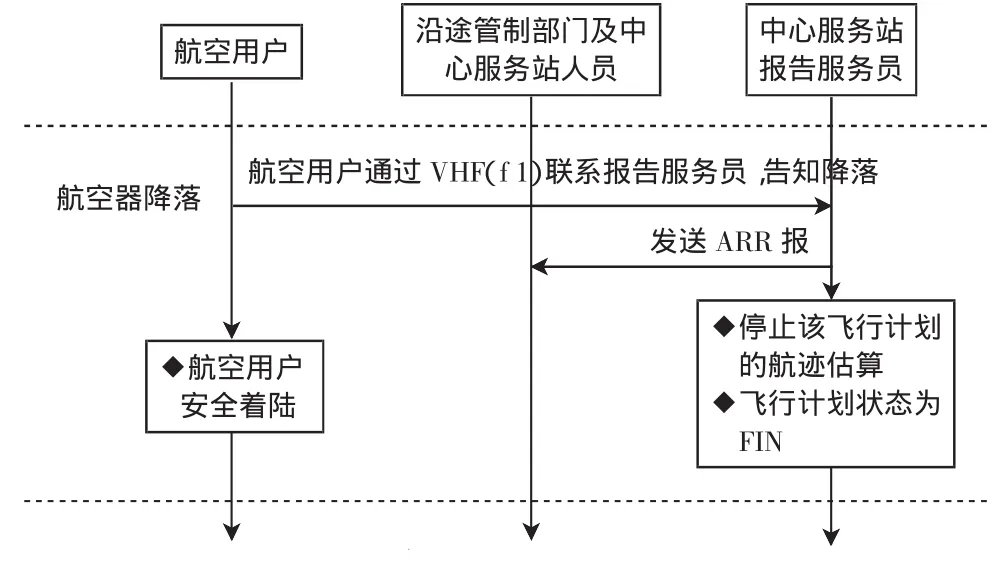
图4 报告空域降落流程图Fig.4 Flow diagram of landing from reporting airspace
2.4.3 不同责任主体间的移交
不同责任主体间的移交包括航空器从管制空域到监视空域、监视空域到管制空域、不同中心服务站间报告空域到报告空域3种基本场景。不同责任主体间移交时,当前责任主体需提前与下一个责任主体进行联系,获得批准后方可移交。
航空器从管制空域飞向监视空域,如图2(c)所示。在预计到达边界前30 min(VSP),服务于监视空域的中心服务站系统飞行计划状态变更为预激活状态。预计到达边界前10 min(VSP),管制部门系统向中心服务站系统发送预计飞跃(EST)报,此时中心服务站系统飞行计划状态变更为协调状态。中心服务站系统向管制部门系统发送管制协调接受(ACP)报。监视空域雷达探测到目标后,飞行计划与雷达目标相关。预计到达边界前1 min(VSP),管制部门系统向中心服务站系统发送管制移交(TOC)报,飞行计划状态变更为移交状态。中心服务站系统接到TOC报后,飞行计划状态变更为移交状态,中心服务站系统向管制部门系统发送管制移交接受(AOC)报。监控服务员手动接收该航空器,飞行计划状态变更为激活状态。离开边界后10 min(VSP),管制部门系统停止对飞行计划的航迹估算,飞行计划状态变更为结束状态,其流程如图5所示。
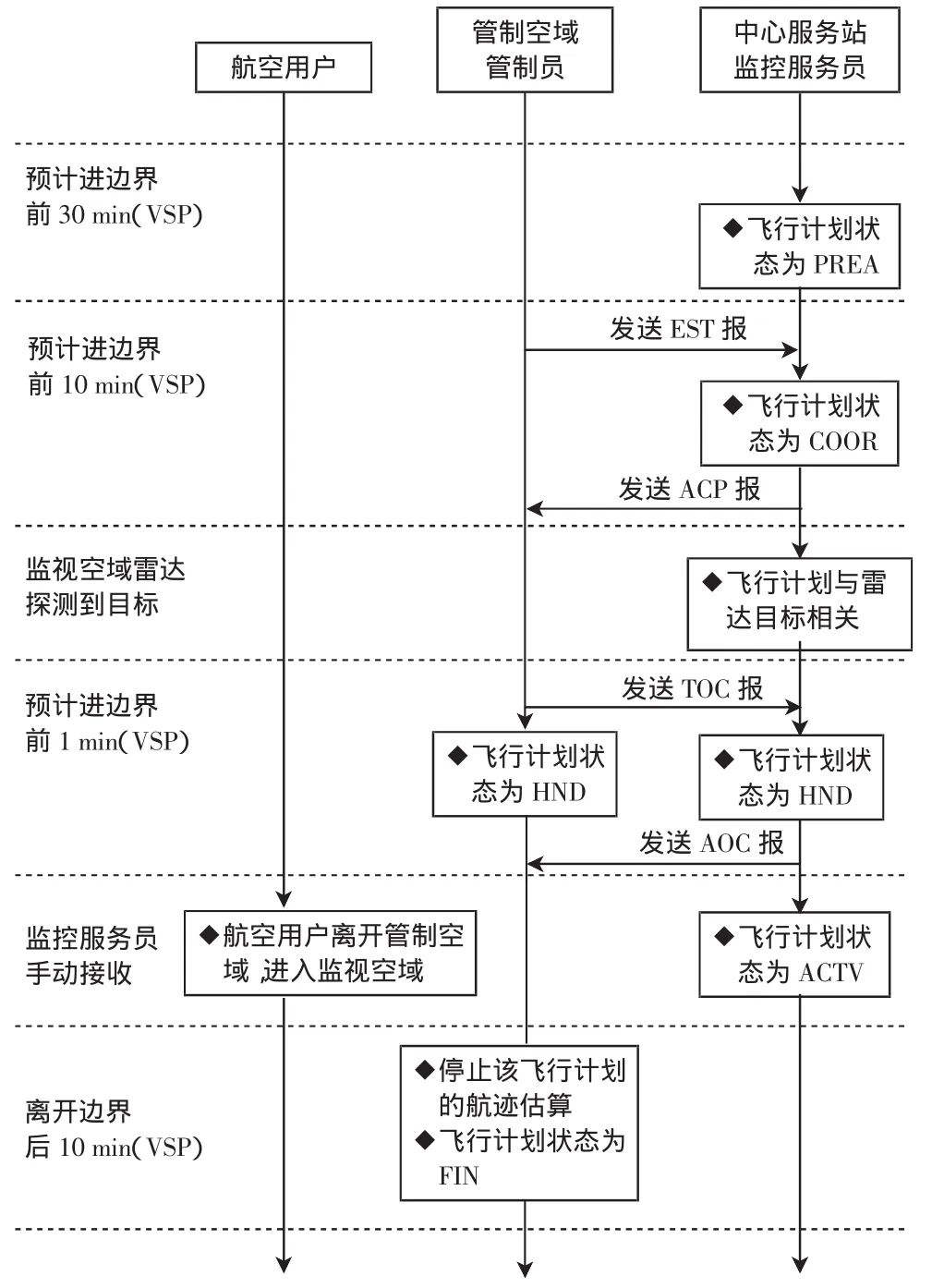
图5 管制空域到监视空域流程图Fig.5 Flow diagram of flying from controlled airspace to monitoring airspace
航空器从监视空域飞向管制空域与航空器从管制空域飞向监视空域综合运行支持流程相同。不同中心服务站间报告空域飞向报告空域与航空器从管制空域飞向监视空域综合运行支持流程略有不同,主要区别在于报告空域中没有监视设备,无法显示航迹,中心服务站报告服务员只通过电子进程单为航空器进行服务。
2.4.4 责任主体内不同空域间的移交
责任主体内不同空域间的移交包括监视空域到报告空域、报告空域到监视空域两种基本场景。责任主体内不同空域间移交时,无需提前进行联系,到达空域边界时便可移交。
航空器从监视空域飞向报告空域,如图2(d)所示。在预计到达边界前1 min(VSP),中心服务站系统内部发送消息,飞行计划处于移交状态。报告服务员手动接收,飞行计划状态变更为激活状态。此时航空器离开监视空域,进入报告空域,其流程如图6所示。
航空器从报告空域飞向监视空域与航空器从监视空域飞向报告空域综合运行支持流程相同。

图6 监视空域到报告空域流程图Fig.6 Flow diagram of flying from monitoring airspace to reporting airspace
2.5 通用航空综合运行支持综合场景运行示例
航空用户从天津报告空域飞往石家庄监视空域。飞行路径在天津中心服务站与石家庄中心服务站范围内,途经天津报告空域、石家庄报告空域、石家庄监视空域。飞行过程可拆分为报告空域起飞,报告空域到报告空域,报告空域到监视空域,监视空域降落4个基本场景,假设飞行空域划分如图7的飞行示意图所示。假设航空器具有ADS-B、GPS、VHF收发机,远端站具有低空监视雷达、红外监视设备、ADS-B、VHF收发机。
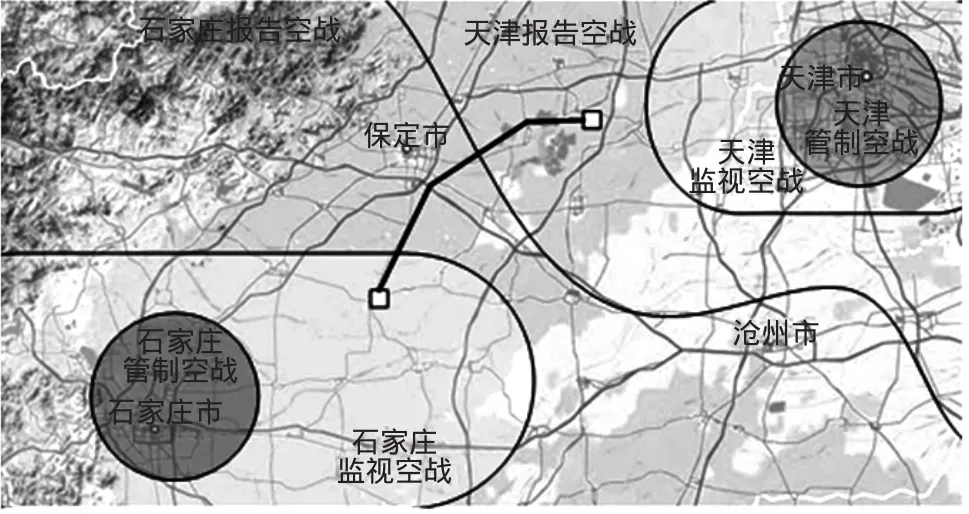
图7 飞行示意图Fig.7 Flight schematic diagram
飞行当天,计划审批部门向天津中心服务站、石家庄中心服务站发送领航计划报。各中心服务站在接到领航计划报之后,通用航空中心服务站系统(以下简称系统)生成一个未激活状态的飞行计划并将飞行计划预处理。预计起飞前30 min,天津中心服务站系统将此飞行计划变更为预激活状态。航空器起飞前,报告服务员与航空用户进行人工协调,飞行计划变更为协调状态。航空器起飞时,航空用户联系报告服务员,告知起飞,天津中心服务站系统向石家庄中心服务站发送起飞报。各系统根据实际起飞时间重新进行航迹估算,天津中心服务站飞行计划变更为激活状态。此时航空用户在天津中心服务站报告空域飞行,接受报告服务员服务。到达预计报告点时,航空用户向报告服务员报告当前位置,报告服务员记录报告内容后系统将自动更新该航空用户的电子进程单信息。由于报告空域内看不到航迹,报告服务员将根据航空用户电子进程单信息了解航空器的飞行动态。同时报告服务员将根据航空用户需求为其提供最新的气象信息。
随后航空用户由天津中心服务站报告空域飞向石家庄中心服务站报告空域。预计到达边界前30 min,石家庄中心服务站系统的飞行计划变更为预激活状态。预计到达边界前10 min,天津中心服务站向石家庄中心服务站发送预计飞跃报。石家庄中心服务站系统接到预计飞跃报后,飞行计划变更为协调状态,同时向天津中心服务站发送协调接受报。预计到达边界前1 min,天津中心服务站向石家庄中心服务站发送移交报,此时天津中心服务站飞行计划状态为移交状态。石家庄中心服务站在接到移交报后飞行计划状态变更为移交状态,同时向天津中心服务站发送移交接受报。石家庄中心服务站报告服务员手动接收,飞行计划变更为激活状态。离开边界后10 min,天津中心服务站系统停止对飞行计划的航迹估算,飞行计划变更为结束状态。
随后航空器从石家庄报告空域飞向石家庄监视空域。预计到达边界前1 min,石家庄中心服务站飞行计划变更为移交状态。监控服务员手动接收,飞行计划状态变更为激活状态。此时航空器离开报告空域,进入监视空域。监视空域内,石家庄中心服务站监控服务员监视飞行动态,当系统产生偏航告警、短期冲突告警、最低安全高度告警、危险区入侵告警时,监控服务员根据告警类别督促航空用户调整航向,用以确保航空用户安全,同时防止航空用户在未提交计划的情况下闯入管制空域,以保护管制空域安全。
航空器降落后,航空用户联系石家庄中心服务站监控服务员告知降落。中心服务站系统向天津中心服务站发送落地报。此时石家庄中心服务站系统停止对该飞行计划的航迹估算,飞行计划变更为结束状态。天津中心服务站接到落地报后不做处理。
3 结语
本文根据中国低空空域划设情况以及国务院、中央军委发布的《关于深化我国低空空域管理改革的意见》,结合中国运输航空及美国通用航空飞行服务站运行方式,初步设计各空域的责任主体,根据航空器跨越的空域种类将飞行拆分成管制空域起降、监视空域起降、报告空域起降、管制空域到监视空域、监视空域到报告空域、报告空域到报告空域、报告空域到监视空域、监视空域到管制空域等基本场景,实际飞行将是若干基本场景的组合,针对不同基本场景对通用航空综合运行支持流程进行设计,并对其中部分基本场景流程设计进行详细说明,最后举例介绍通航综合运行支持综合场景的流程。本文可以为通用航空综合运行支持系统的设计开发提供依据,也可为中国低空空域改革和通用航空发展提供决策参考。
[1]中国民用航空局.中国民用航空发展第十二个五年规划(2011年至2015年)[G].北京:中国民用航空局,2011.
[2]中国民用航空局.关于加快通用航空发展的措施[G].北京:中国民用航空局,2010.
[3]中华人民共和国国务院,中华人民共和国中央军事委员会.关于深化我国低空空域管理改革的意见[G].北京:国务院,中央军委,2010.
[4]蔡 军.低空开放不等于低空放开[EB/OL].[2011-05-30].http://news.xinhuanet.com/mil/2011-05/30/c_121475110.htm.
[5]王 选,李永宁.飞行计划的状态管理及程序实现[J].中国民航飞行学院学报,2003:14(4),21-23.