基于激光传感器的船舶避碰预警系统
2014-11-14 03:20武汉理工大学能源与动力工程学院屈骁武汉理工大学工程训练中心郑卫刚
世界海运 2014年6期
武汉理工大学能源与动力工程学院 屈骁 武汉理工大学工程训练中心 郑卫刚
为了实现船舶的安全航行,航运技术主要采取两种措施,一种是船靠港时依赖于船舶交通管理系统 (VTS),另一种是依赖于船舶避撞规则。雷达一直是这两种措施的主要观测设备,用来检测和识别船只。作为普通雷达的发展,自动雷达标绘仪(Automatic Radar Plotting Aids,ARPA) 早已作为现代大型船舶上用于避免碰撞的主要仪器而得到普遍使用,对减少船舶碰撞发挥了重要的作用。随着计算机和通信技术以及自动化技术的发展,船舶自动识别系统(Automatic Identification System)作为未来海上识别、检测和通信系统,提高了船舶航行安全,避免了海上碰撞[1]。
无论是传统的雷达、ARPA 技术,还是自动识别系统AIS,都是确保海上安全航行、防止碰撞的有力手段。但是从中国目前的实际情况来看,大型商船均配备较为完善的检测系统,而中等船只和一般轻型吨位的渔船,由于现有设备的昂贵,很难大范围得到普及。因此对于中小船只来说,高性价比的防撞系统是必需的。现阶段防撞系统未考虑到船舶与船舶之间或者船舶与障碍物之间的相对速度、船舶之间相对的行驶方向、船舶前后左右不同方向预警距离要求不同这三种情况,而是机械地判断固定的相对距离而达到预警目的,现实应用局限性很大,比如靠码头、船舶并排行驶等正常情况下也会发生预警。
激光器件及测量技术的发展为解决海上船舶防撞提供了一个新的途径,它使得船舶导航、避撞甚至停靠的自动化和自适应成为可能。激光测量具有高方向性、高单色性、高亮度、测量速度快等优点,尤其是对雨雾有一定的穿透能力,大气抗干扰能力强。结合海上船舶间测距的特点,可以采用脉冲激光测距、激光定位、激光测速来及时连续的测量目标船只与周围船只的距离、测量目标船只与周围船只的相对运动方向、测量目标船只与周围船只的相对运动速度。
一、激光测距的基本原理
激光测距分为连续波相位测距和脉冲测距两种。连续波测距是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟[2],再根据调制光的波长,换算此相位延迟所代表的距离。连续波相位测距的精度极高,一般可达毫米级,但连续波相位测距较激光脉冲测距电路复杂,成本高。考虑到在船舶防撞系统中不需要那么高的精度,采用激光脉冲测距方法完全能够满足船舶防撞系统的要求[3]。
激光脉冲测距是利用测量往返脉冲间隔时间获知距离,测量方法是在确定时间起止间用时钟脉冲计数。这种方法可以得到10-10s以上的测量精度[3]。激光脉冲测距部分原理图如图1所示。由激光发射器产生作用时间为几纳秒、发射角为几豪弧度的激光脉冲经光学系统射向被测目标,经目标反射后返回到接收系统。通过主波脉冲和回波脉冲的时间差即可测出被测距离。设目标距离为S,安全距离为S0,光脉冲往返时间为t,光在真空中的传播速度为c(c=2.99×108m/s,光在空气中传输受介质、气压、温度的影响可忽略),则有

设在t时间内,有N个时钟脉冲进入计数器,时钟脉冲的震动频率为ƒ0,则:


图1 激光脉冲测距部分原理图
上述公式中,K=c/2ƒ0,表示每一个时钟所代表的距离增量;如果计数器计数N个时钟脉冲,则由式(4)可得目标距离S,K的大小决定了脉冲测距的测量计数精度。
二、船舶防撞系统的设计
1.双自由度云台的设计
本系统选择了由水平方向0°~355°和垂直方向-90º~+90º的两自由度云台,能有效满足大测量范围的需要。接线说明见图2[4]:
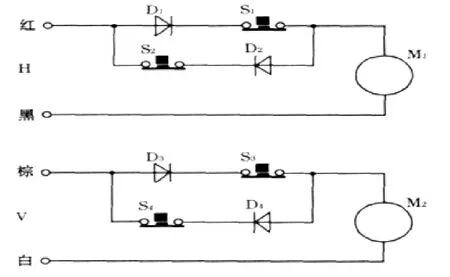
图2 电动云台电路原理图
红、黑为水平控制线,红正黑负为水平电机向左运转,红负黑正为向右运转。
棕、白为垂直控制线,棕正白负为垂直电机向上运转,棕负白正为向下运转。
图3是双自由度云台电源的逻辑控制示意图。89C52单片机P1接口的P1.4、P1.5、P1.6、P1.7控制4路信号实现云台水平和垂直方向的往返运动;P1.4、P1.5实现水平电机的电源换相,P1.6、P1.7实现垂直电机的电源换相。为确保云台正常工作,在同一时刻,水平和垂直方向电机只能有一个方向供电,74HC126中的4个缓冲(A1~A4)和74LS86中的3个异或门(M1~M3)构成一个封闭逻辑,实现4路信号的逻辑控制,以保证水平和垂直方向的唯一选通
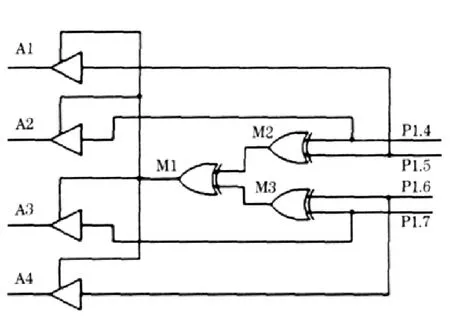
图3 云台电源的逻辑控制
2.船舶周围障碍物的三维坐标定位
采用激光测距、定位、测速的原理分别测得测量目标船只与周围船只(障碍物)之间的相对距离S、方位角θ、相对速度的大小v、相对速度与X轴正半轴的夹角β,O点为测量目标船舶电动云台激光测距传感器所在位置,A为周围船舶或者障碍物,B为周围船舶或障碍物距离测量目标船舶距离最小的位置,L为周围船舶或障碍物距离测量目标船舶最小距离,确定测量目标船舶周围障碍物的定位,如图4所示。

图4 测量目标船舶周围障碍物的定位
3.控制系统软件实现流程图
以测量目标船舶的船头为Y轴建立空间坐标系(如图4),船舶发生碰撞与β、L、θ、S有关。周围船舶或障碍物在不同象限β要求不同,如周围船舶A若在第一象限,那么只有β角在π~3π/2之间才有可能发生碰撞,其他角度没有必要预警。预警的时机与碰撞距离L和周围船舶从A到B行驶的时间t有关,即

其中,T表示从监测位置到距离可能发生碰撞位置船舶驾驶员的反应时间,只有L和T同时符合设定值L0和T0预警才是科学的,周围船舶所在的象限和β角大小有关。由于本系统是实时监测,因此即使在检测期间船舶走曲线也没有关系,一样可以做出科学预警。控制系统软件实现流程如图5所示。
三、结语
本系统采用激光测距传感器,对行船过程中船舶周围500m的障碍物进行实时监控。在设计中利用多块激光传感器和电动双自由度云台结合,实现水平和垂直两方向大范围侦测;能够不间断的监测目标船舶与周围障碍物的相对速度、距离和角度,并根据不同的复杂情况自主判定恰当的预警时机进行预警,有效克服了设定固定预警距离而忽略船舶间的相对速度、行驶方向的传统防撞预警系统预警时机的不恰当性。本系统具有良好的实用价值和应用前景,相信随着科学技术的不断发展,激光测距技术在船舶防撞报警过程中能够得到完美应用。

图5 控制系统软件实现流程
[1]章坚武,张数明.基于激光测距的船舶防撞定位系统设计[J].应用激光,2008(6):497-501.
[2]张召亮,张帆,马智远,等.激光测距在汽车智能防撞系统中的应用[J].中国水运,2007(7):53-54.
[3]丁洪影.基于激光测距技术的船舶防撞系统的研究[J].福建电脑,2010(4):144-145.
[4]刘岩川,王玲芬,栾慧,等.基于激光测距技术的汽车防撞系统的研究[J].仪表技术与传感器,2008(11):96-98.
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
摄影之友(影像视觉)(2020年2期)2021-01-14
电子制作(2019年23期)2019-02-23
小哥白尼(趣味科学)(2018年12期)2018-12-18
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
汽车工程师(2018年1期)2018-07-13
制导与引信(2017年3期)2017-11-02
中国公路(2017年13期)2017-02-06