自主水下航行器模糊自校正航迹控制*
2014-11-10 07:10:04赵新华辛久元
网络安全与数据管理 2014年8期
郝 阳 ,赵新华 ,辛久元
(1.中国人民解放军91439部队,辽宁 大连116041;2.哈尔滨工程大学 自动化学院,黑龙江 哈尔滨150001;3.中国人民解放军65066部队,辽宁 大连116100)
为了尽快到达目标位置并尽可能节省燃料,一般要求水下航行器 AUV(Autonomous Underwater Vehicle)以一定速度作直线航行,本文所提航迹控制就是指相邻转向节点之间直线航行阶段的航迹保持。AUV作为一种典型的非线性控制对象,其控制具有两个主要特点:一是控制对象的严重不确定性;二是水下海流扰动大且不可预知。应用传统控制方法时需要得到AUV在不同工作条件下的精确数学模型,相比传统控制方法,模糊控制不依赖于对象的数学模型,可以适应AUV控制的需要。近年来,国内外研究人员将模糊控制应用于水下航行器并取得了丰硕的成果。参考文献[1]中的AUV修改学习实时T-S模糊控制器的模糊模型并通过结合一个模糊目标进行拓展,提高了控制精度和适应性;参考文献[2]为AUV水平面运动提出了一种新的分层模糊/李雅普诺夫控制方法;参考文献[3]设计了一种简单有效的深潜救生艇模糊控制器;参考文献[4]给出了使用模糊控制器的AUV模糊模型和数学模型的数值仿真结果。本文采用模糊控制方法,一不依赖其数学模型,不受其工作条件限制;二为获得更好的控制效果并克服海流扰动的影响,引入模糊增益调节方法作进一步的优化。最后通过对比仿真验证了该方法的控制效果。
1 AUV水平面运动数学模型
AUV六自由度运动通常可以分解为垂直面运动和水平面运动,本文只研究AUV在水平面内的航迹控制。假定AUV在垂直面内受到良好的定深控制,且忽略横摇和纵摇运动对水平面运动的影响,则AUV水平面运动学方程为[5]:

其中 u、v、r分别为AUV在运动坐标系下的纵荡速度、横荡速度、首摇角速度;Ψ为首摇角;ξ、ζ分别为AUV在固定坐标系下的位置坐标。该运动学方程也可以看作由运动坐标系向固定坐标系的坐标变换方程。
忽略纵荡、横摇和纵摇运动,AUV水平面动力学方程为[5]:
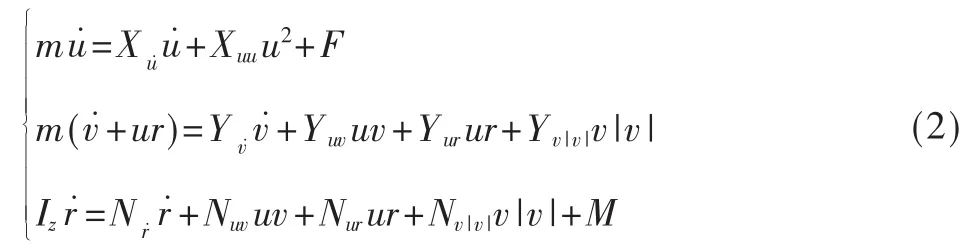
其中 m为 AUV的质量;I为转动惯量;X、Y、N为水动力系数[6];F为AUV的轴向推进力,取期望纵荡速度为u=2 m/s,容易得到轴向运动受力平衡后的推进力F=6.48 N。本文不考虑纵荡速度变化的影响,令推进力恒定;M为AUV在垂直舵面与推进器联合作用下产生的首摇转矩,即控制量。
将恒定推进力和鱼雷型水下机器人REMU100的有关参数[5]代入式(2),得到:
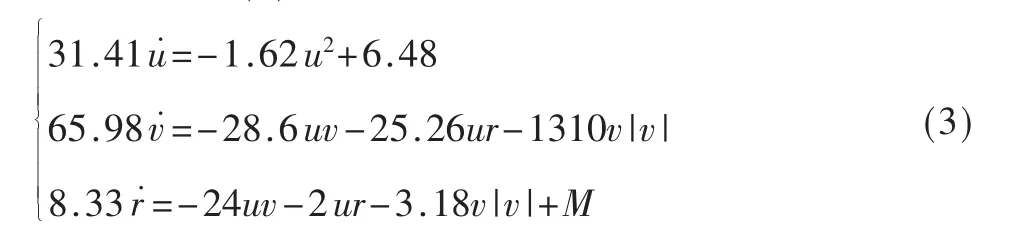
由于模糊控制不依赖于被控对象的数学模型,该模型只用于Matlab/Simulink仿真[7]。
2 控制方法及其实现
设 AUV实时位置坐标为(x(t),y(t)),其计划航迹的下一个转向节点坐标为(xd,yd),则此时AUV距该节点的距离以及驶向该节点所需的期望航向可由以下公式计算得到:

这里应注意:使用式(5)时需要判别象限。
基于模糊增益调节的模糊自校正AUV航迹控制方法的原理框图如图1所示。
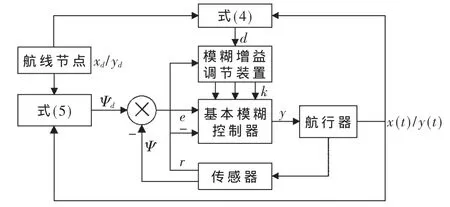
图1 模糊自校正AUV航迹控制原理框图
该控制方法包括 1个具有固定量化因子 Ke、Kr和Ky的基本模糊控制器和3个模糊增益调节装置,该调整装置也是一种可以改变基本模糊控制器输入输出量化因子的模糊控制器,它们的输出即比例因子ke、kr和ky,与固定量化因子相乘,获得新的量化因子 Keke、Krkr和Kyky是可调节的。
2.1 基本模糊控制器
基本模糊控制器有两个输入量:航向误差e和偏航率r,其输出y为作用于航行器的控制转矩M。其输入输出关系如表1所示的模糊规则定义。
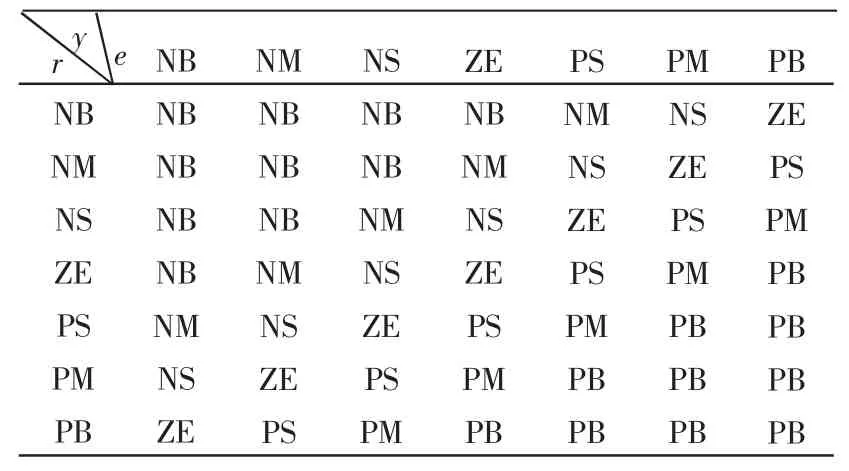
表1 基本模糊控制器规则库
表1中模糊语言变量为:NB:负大;NM:负中;NS:负小;ZE:零;PS:正小;PM:正中;PB:正大。 采用取大-取小近似推理和模糊蕴含规则实现输入量的模糊化;采用面积中心法实现输出量的清晰化[8]。其输入输出变量的隶属函数形式相同,如图2所示。
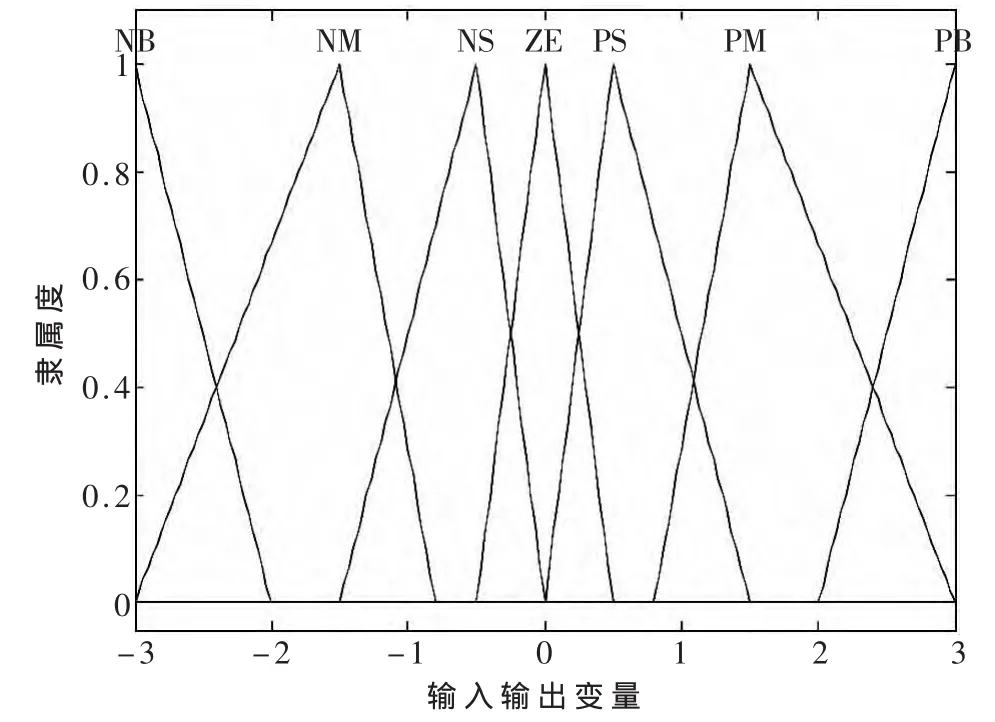
图2 基本模糊控制器输入输出变量隶属度函数
2.2 模糊增益调节装置
为克服海流扰动影响并获得更好的控制效果,引入该模糊增益调节装置,即对基本模糊控制器量化因子的模糊优化方法。该方法也是一种马丹尼型模糊控制器,有两个控制输入量:距离d和偏航角Ψ以及一个输出量:增益k。其完整控制规则定义如表2所示。
表2中模糊语言变量为:ZE:零;NE:负;PE:正。 这组规则同时适用于 ke、kr和 ky。 模糊增益调节装置采用取大-取小近似推理和模糊蕴含规则实现输入量的模糊化;采用面积中心法实现输出量的清晰化[8]。其输入变量距离d和偏航角Ψ以及输出变量增益k的隶属度函数分别如图3~图5所示。
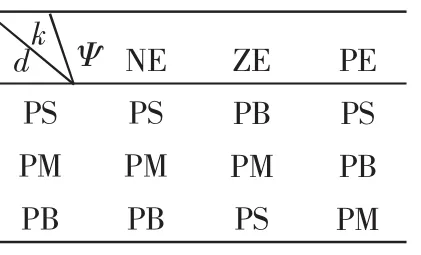
表2 模糊增益调节装置规则集
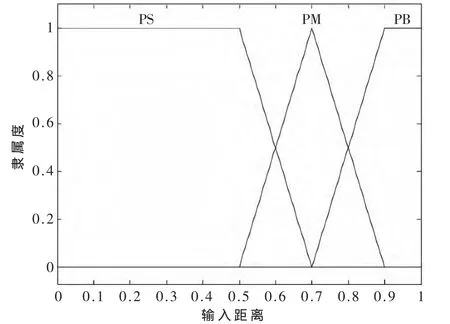
图3 输入变量距离d隶属度函数
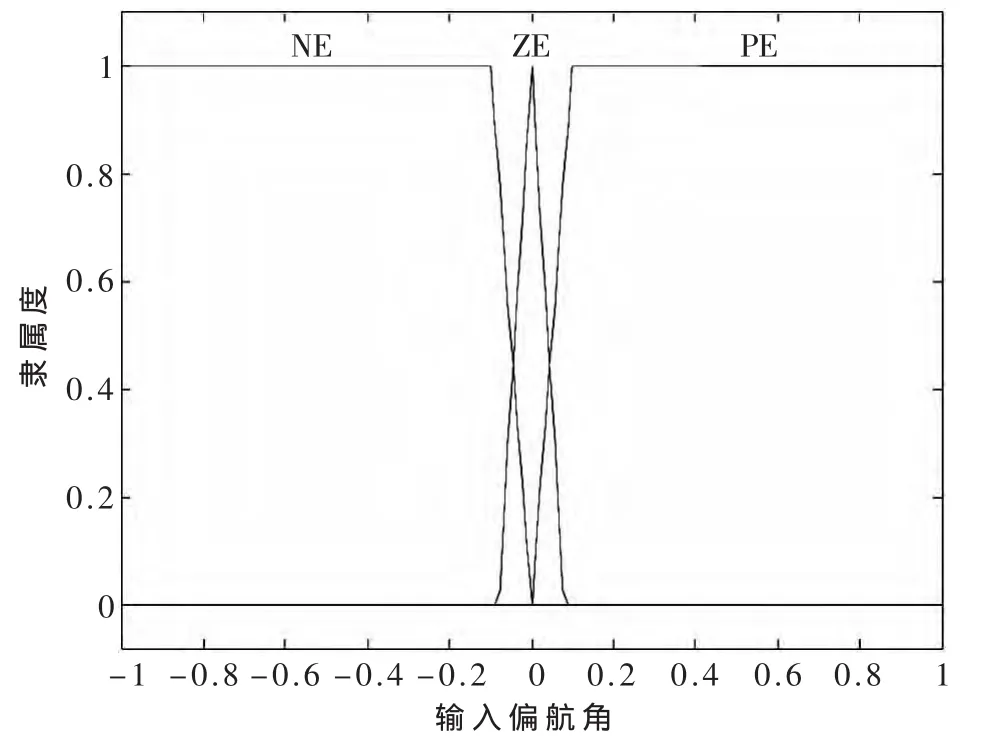
图4 输入变量偏航角Ψ隶属度函数
3 仿真结果与分析
为更好地说明模糊自校正航迹控制方法的优势,这里给出该模糊自校正控制与基本模糊控制的仿真结果,并进行比较,仿真条件统一设定为在垂直于AUV航向的海流扰动作用下,沿预定航迹航行600 m,仿真时间为310 s。图6所示为基本模糊控制器和模糊自校正控制器的仿真轨迹比较图。
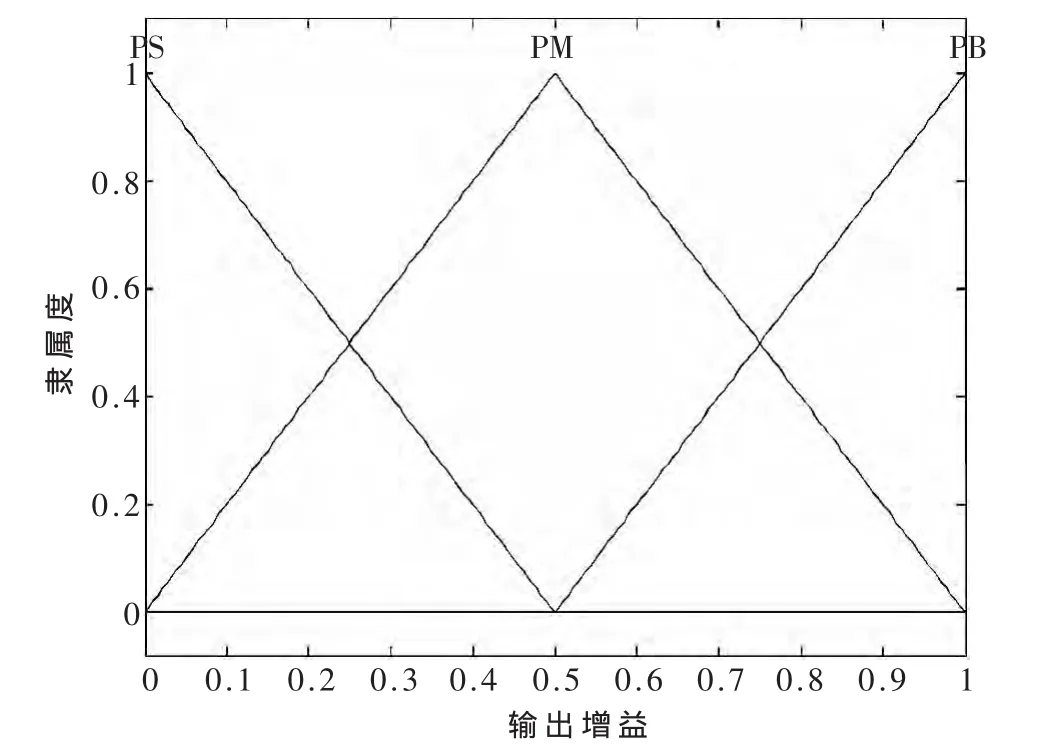
图5 输出变量增益k隶属度函数

图6 仿真轨迹比较图
海流扰动在仿真开始20 s后加入。由图6中可以看出,在相同条件下,基本模糊控制方法偏离目标航迹的最大距离为18 m,且航行轨迹不够平滑;而模糊自校正自动驾驶仪偏离目标航迹的最大距离为15 m,且航行轨迹非常平滑。仿真结束时,二者都能够使AUV基本达到目标航迹的转向节点。仿真结果显示,在海流干扰条件下模糊自校正控制器和基本模糊控制器都能控制AUV实时调整航向驶向目标航迹的转向节点以实现航迹保持;但模糊自校正控制器相对于基本模糊控制器对海流扰动的适应性更强且具有更好的控制效果。
本文在一种基本AUV航迹模糊控制方法的基础上,引入模糊增益调节方法对其量化因子进行实时优化,提出了一种模糊自校正AUV航迹控制方法,并对两者进行了比较。在海流扰动的作用下,基本AUV航迹模糊控制方法的控制效果并不理想,而模糊自校正AUV航迹控制方法具有更好的控制效果,特别是对海流扰动具有更强的适应性。结果表明,应用该模糊自校正控制方法为AUV设计航迹控制器是完全可行的。
[1]Wang Fang,Xu Yuru,Wan Lei,et al.Modified learning of T-S fuzzy neural network control for autonomous underwater vehicles[C].Proceedings of 2009 International Conference on Information Technology and Computer Science.IEEE Press,361-365.
[2]FRANCESCO M.RAIMONDI,MAURIZIO MELLUSO.Hierarchical fuzzy/lyapunov control for horizontal plane trajectory tracking of underactuated AUV[C].Proceedings of IEEE International Symposium on Industrial Electronics.IEEE Press,2010:1875-1882.
[3]AMJAD M,ISHAQUE K,ABDULLAH S S,et al.An alternative approach to design a fuzzy logic controller for an autonomous underwater vehicle[C].Proceedings of 2010 IEEE Conference on Cybernetics and Intelligent Systems.IEEE Press,195-200.
[4]HASSANEIN O,ANAVATTI S G,RAY T.Fuzzy modeling and control for autonomous underwater vehicle[C].Proceedings of the 5th International Conference on Automation,Robotics and Applications.IEEE Press,2011.169-174.
[5]苏玉民,曹建,徐锋,等.鱼雷形水下机器人非线性航迹跟踪控制[J].上海交通大学学报,2012,46(6):977-983.
[6]金鸿章,姚绪梁.船舶控制原理[M].哈尔滨:哈尔滨工程大学出版社,2001:1-13.
[7]薛定宇.控制系统计算机辅助设计-MATLAB语言与应用(第 2版)[M].北京:清华大学出版社,2006:183-236.
[8]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008:11-51.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:38
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03 01:04:00
青年歌声(2019年12期)2019-12-17 06:32:32
测控技术(2018年2期)2018-12-09 09:00:56
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中学数学杂志(高中版)(2016年6期)2017-03-01 18:51:01
上海大中型电机(2017年4期)2017-02-06 05:26:57
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
舰船科学技术(2015年8期)2015-02-27 15:38:47