应用水印旋转角度加密的双水印算法
2014-10-11 06:23吴新亚陈永红冯祥斌
华侨大学学报(自然科学版) 2014年4期
吴新亚,陈永红,冯祥斌
(华侨大学 计算机科学与技术学院,福建 厦门361021)
数字化信息未经授权的复制和发布,使得数字多媒体信息的知识产权的保护和认证成为近年来研究的热点.为了保护版权,Braudaway等[1]提出了一种早期的可见水印方法,利用非线性方程组来完成对空间域的亮度的修改.随后,可见水印方法也越来越多[2-5].朱从旭等[6]提出了一种基于提升小波变换和Liu混沌系统的图像双水印算法,通过混沌系统确定可见水印的嵌入系数,同时用系统量化实现鲁棒性水印的嵌入.罗永等[7]提出了一种小波变换结合纠错编码的半透明数字水印以标示版权,但是该算法在水印合法移除之后,载体图像会有一定的降质.Hu等[8-9]提出一种在小波域自适应嵌入可见水印的算法,该算法中在图像融合时的亮度掩蔽效应采用高斯截断函数.本文提出了一种结合图像旋转算法[10]的双水印版权水印算法,用于版权保护.

图1 纯旋转运动时像素点的移动Fig.1 Movement of pixel point after pure rotational motion
1 图像旋转及旋转角度估计算法
1.1 全局运动估计
当连续的图像序列围绕着任意的旋转中心(x0,y0)作纯旋转运动,且角度为θ时,图像帧之间的像素点运动如图1所示.如果把平移变换与纯旋转运动相结合,那么此时像素间的移动关系表达式为

式(1)中:dx和dy是各个帧分别沿着x和y方向上的平移变换.
假设旋转的角度很小,那么式(1)可以简化为

把式(2)用于图像帧间局部运动的所有个匹配点对上,可以得到一个由包含5个未知数(θ1,x0,y0,dx,dy)的显性方程组构成的系统.把式(2)重新排列成¯b=A¯x形式,即
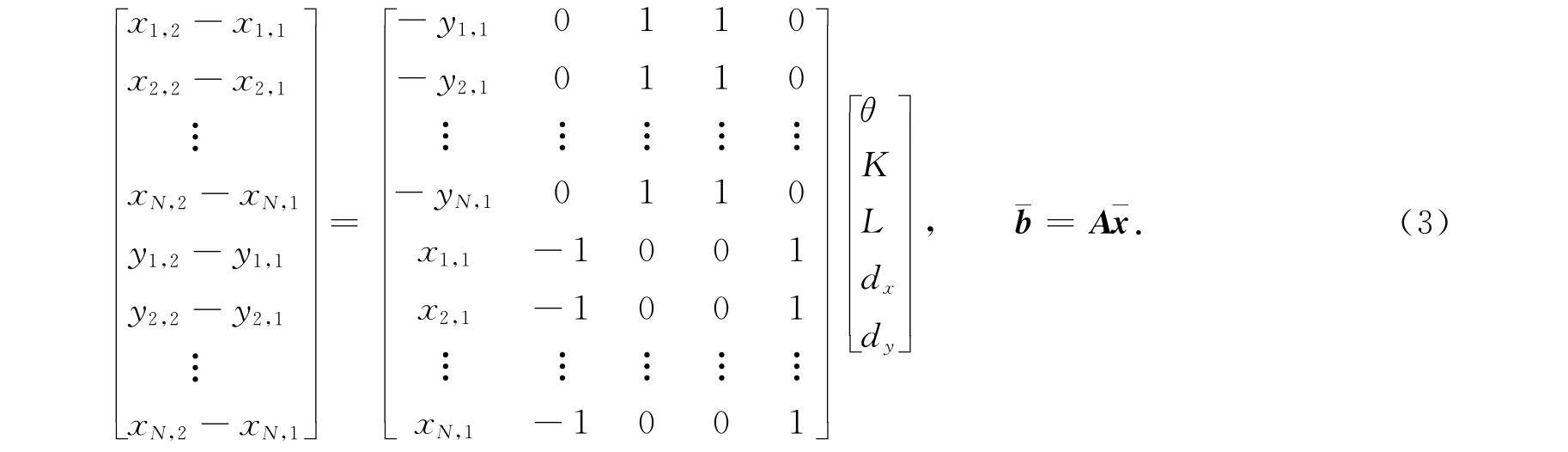
式(3)中:K和L分别替换了式(2)中的x0θ和y0θ.
因为矩阵A的秩是3,所以式(3)得到的5个未知数的解不唯一.为了估计这5个参数,需要连续帧间更多的信息或者使用其他的方法.
1.2 旋转算法
基于式(1),一个基本的旋转模型定义为

式(4)中:α和β分别表示像素点(x1,y1)在水平方向和垂直方向的平移运动量.
通过式(1),(4),可以推导出α和β为
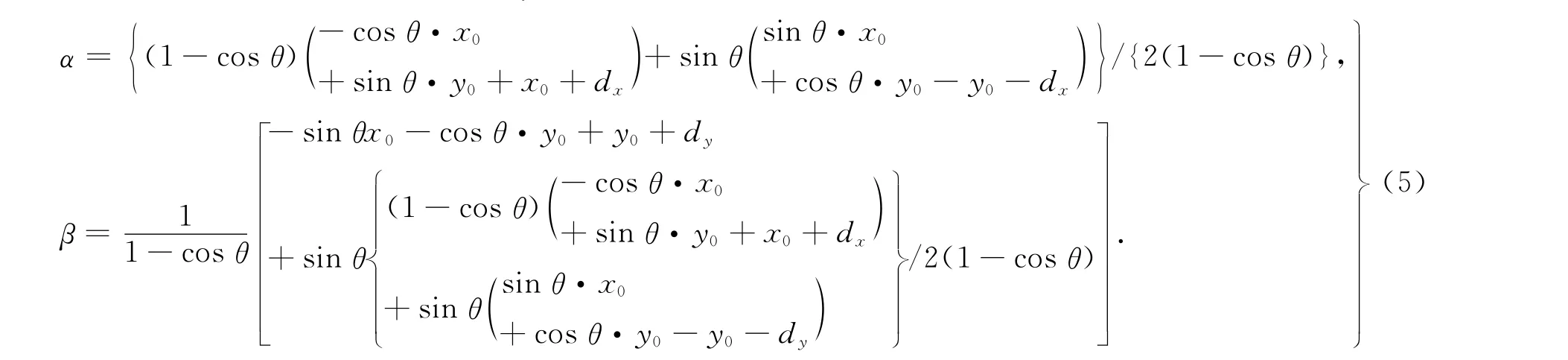
式(5)中:θ≠n·π(n是整数).
由式(4),(5)可以判断出旋转和平移变换运动都可以用单向旋转模型表示,同时可以使用全局运动估计来找到式(4)中所需要的参数,即旋转中心和角度.
1)旋转中心估计
块运动和中值滤波的结果是当前图像帧的每个像素点的局部运动矢量.而任意点(x,y)的局部运动矢量可以表示为u=x2-x1,v=y2-y1.第2个图像帧点(x2,y2)是第一个图像帧在经过纯旋转后所对应的点,u和v分别是x轴和y轴所对应的运动矢量.对于纯旋转运动的情况,运动矢量会在任意一点与一个圆的切线重合,而该圆的中心与图像旋转中心是同一个点.因此,任意点处与运动矢量垂直的垂直线会相交于一点,这样就可以描绘出旋转中心,如图2所示.图2中:点A,A1,A2的坐标分别为(x0,y0),(x1,y1),(x2,y2),A1和A2是带箭头的向量的起点.点A1(x1,y1)局部运动矢量的垂直平分线为y=a1x+b1,a1=u1/v1,b1=(y1+v1/2)-a1(x1+u1/2),而u1和v1是点A1(x1,y1)的局部运动矢量.点A1(x2,y2)局部运动矢量的垂直平分线为y=a2x+b2,其中a2=u2/v2,b2=(y2+v2/2)-a2(x2+u2/2),而u2和v2是点A2(x2,y2)局部运动矢量.
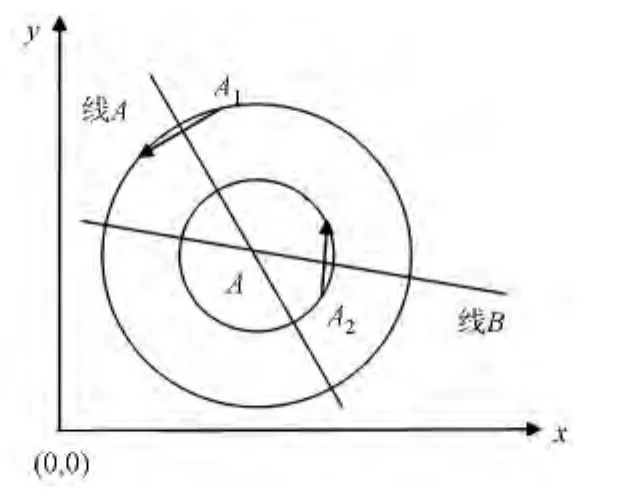
图2 旋转中心点估计Fig.2 Rotation center estimation
为了保证噪声环境下计算结果的鲁棒性,可以使用超定系统来替代3个匹配点的方法.对于N个匹配点的情况,可以得到

式(6)可以写成Ax=b,那么旋转中心可以表示为x=(ATA)-1ATb.
2)旋转角度估计
通过图1的第一个帧中的点(x1,y1)和与该点移动后相匹配的点(x2,y2),可以得到旋转角度,计算方法为

考虑到数值的可靠性,最终的估计结果是采用N个匹配点的估计值的平均值.
2 双水印算法
2.1 可见水印的嵌入与消除和提取
在小波域根据亮度和局部空间特征,自适应地嵌入可见水印,其过程有如下7个步骤.
1)设载体图像Z={Z(x,y),1≤x,y≤n},而水印信息表示为

其中:n能被2m整除,n/(2m)≥3.
2)对待嵌入的水印进行顺时针旋转-0.5°,得到处理后的水印图像信息Wi,j.
3)把原始载体图像Z分成大小为m×m的子块,选出一个大小为m×m的子块Z′作为嵌入可见水印的载体.
4)对载体图像Z′和水印图像进行小波分解(DWT).
5)计算选取的m×m的载体子图像的亮度掩蔽L(i,j),缩放其值的范围在[0.9,0.95].使用缩放后的L′(i,j)来计算载体图像和水印图像低频子带的缩放因子αl和βl,即αl=L′(i,j),βl=1-L′(i,j).
6)计算在一个高频子带上的坐标(i,j)处的σx的值.对σx进行标准化,且缩放处理至[0.9,1]内.这个缩放后的标准差σ′x可以用来确定该高频子带上的缩放因子αh(i,j)和βh(i,j),即

其中:σ′x表示坐标(i,j)处的标准差σx缩放处理后的值;L′(i/22-r,j/22-r)表示其亮度掩蔽.
7)按照选取的载体子图像的比例,把水印图像的每个子带的系数值缩放后加入载体图像的相应取值范围的子带中,以完成水印的嵌入,可表示为

其中:α和β是载体图像和水印图像分别所对应的缩放因子,它们是由低频子带的亮度掩蔽或者高频子带的亮度掩蔽,以及每个像素的空间活动级决定的;Ci,j和Wi,j分别表示小波分解后的载体图像和水印图像的小波系数,C′i,j指嵌有水印的图像的小波系数.小波进行逆变换,得到嵌有可见水印的图像.
本方案中消除该可见水印的数学表达式可以表示为Ci,j=[C′i,j-β(i,j)Wi,j]/α(i,j).作为标示作用的可见水印,一般情况下是不需要抽取的,而本算法为了通过旋转角度估计验证该可见水印是否是原水印,有必要对其进行抽取.抽取过程描述为:对嵌有可见水印信息的载体图像Z′(x,y)和原始载体图像进行分块处理,并进行 DWT分解;利用表达式Wi,j=[C′i,j-α(i,j)Ci,j]/β(i,j)对水印子块进行抽取;利用图像旋转算法对步骤2),得到可见水印信息进行逆处理,从而提取出可见水印图像.
2.2 不可见鲁棒水印的嵌入和提取
2.2.1 水印信息的预处理 为了使该鲁棒水印在不产生块效应和视觉冗余前提下嵌入到图像中,要对其进行如下5个步骤的预处理.
1)把载体图像分为2m×2m的图像子块,那么嵌入可见水印之后,用于嵌入鲁棒性水印的子块总数为i=[n/(2m)×n/(2m)-1]个,用s=(s1,s2,…,si)表示这些子块,并记做si;
2)用位平面分解方法对可见水印子块进行位平面分解操作,分解为8个m×m的位平面,接着把这些位平面逐个扫描成一维的二进制序列,得到长度为m×m×8的序列,并用0对其进行扩充得到长度为c=m×m×i的序列A′;
3)用初值混沌映射把序列A′映射成混沌序列L=(L1,L2,…,Lc);
4)对序列L进行索引排序得到L′=(Lb,1,Lb,2,…,Lb,c),那么其对应的索引B=(b1,b2,…,bc);
5)用索引B对序列A′进行处理,然后每截取长度为m的序列作为一列,最终得到i个m×m的水印矩阵,然后使用模糊归类的方法把这些水印矩阵嵌入到s=(s1,s2,…,si)的i个子块里面.
2.2.2 基于模糊归类的鲁棒性水印嵌入与检测 1)计算载体图像分块后得到的子图的边缘点数量sum{e(x,y)=0,(x,y)∈si},其中:e(x,y)是载体图像中提取的二值化边缘图的数学表示.
2)对分类后的原始图像的子块si进行DWT变换,得到低频子带LLi,利用步骤二中的归类结果,根据人眼的视觉掩蔽特性,使嵌入水印的强度同图像子块的纹理复杂度成正比,达到自适应水印嵌入的效果,嵌入水印的方法为

式(8)中:LLi(x,y)表示用于嵌入鲁棒性水印的载体图像的子块低频子带;δ表示嵌入强度;W′表示经预处理后的水印信息;LL′i(x,y)表示嵌入水印后的低频子带.对各图像子块进行DWT反变换,重构得到嵌有水印的图像Z′(x,y).
鲁棒性水印的检测:载入原始图像并对其进行分块分类处理,得到各分块的纹理复杂度隶属结果和相应的嵌入强度δ;对原始图像的各个分块进行DWT变换,得到小波域的低频子带LLi;对嵌入水印的图像Z′(x,y)也进行DWT变换,得到其小波域的低频子带LL′i;利用假设检测的方法进行水印的检测,同时用嵌有水印的图像子块系数减去原始载体图像子块的系数再除以嵌入强度,从而提取出水印信息;对水印信息实施水印信息预处理步骤2)的逆过程得到8个位平面,再利用该8个位平面重构得到加密的水印图像,进行混沌加密的逆过程得到最终的水印图像.
3 实验仿真结果
实验采用大小是512px×512px的灰度图像,鲁棒性水印和可见水印信息都是使用二值灰度图像,中文字为“华”,通过统计各子块的边缘点数得到各类的嵌入强度,分别取δ1=3,δ2=5,δ3=7.实验第一默认载体图像选用Lena的灰度图像,如图3所示.

图3 原始载体图像和二值水印图像Fig.3 Original carrier image and the binary watermark image
3.1 可见水印的嵌入效果
用大小为512px×512px的Lena和Goldhill图像作为载体图像,验证可见水印的嵌入效果和可消除性能,其效果如图4所示.从图4的(a),(c)可以看出:两图的左上角版权信息标志清晰可见,又不影响载体图像的观赏性,且嵌入双水印后的载体图像没有出现明显的降质,表明可见水印的嵌入效果良好.从图4(b),(d)可以看出:去除水印后载体图像没有明显的降质;去除可见二值水印信息的Lena和Goldhill与原始的Lena和Goldhill图像的峰值信噪比(RSN)分别是43.138 2和40.842 4,这说明可见水印算法的可移除性良好.合法移除可见水印信息后的图像质量对比,如表1所示.

表1 合法移除可见水印信息后的图像质量对比Tab.1 Comparison of image quality after the visible watermark is removed lawfully
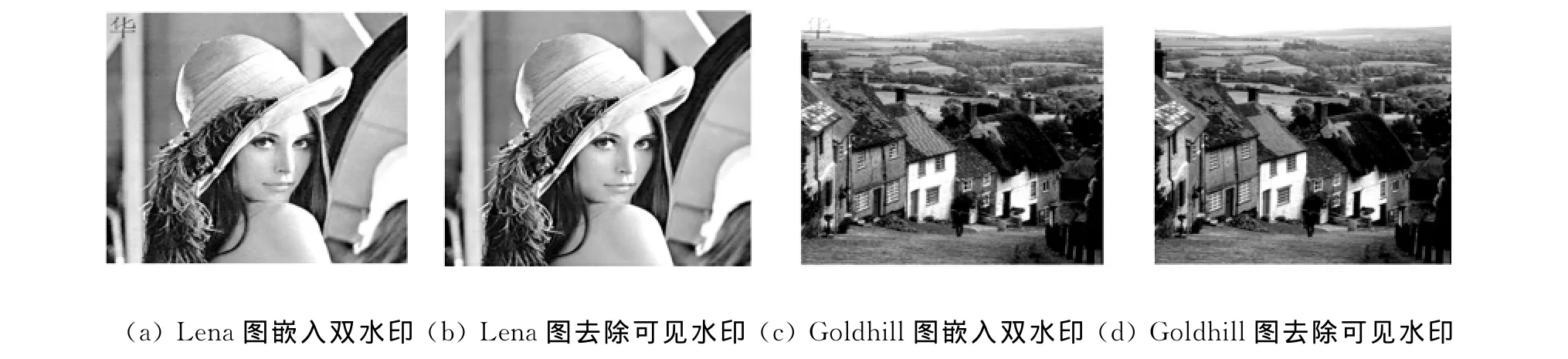
图4 Lena和Goldhill嵌入双水印和可见水印的合法消除效果图Fig.4 Results of embedding dual watermark and lawfully remove visible watermark based on Lena and Goldhill
从表1可以看出:当用户采用合法手段移除可见水印信息后,移除可见水印信息之后的载体图像与原始载体图像的峰值信噪比RSN的值在整体上优于文献[6-7]的算法方案.仅在Goldhill作为载体图像时,本算法略低于文献[6],但比文献[7]的算法方案好.这说明算法具有较好的可见水印合法去除性能.
3.2 可见水印的防篡改和恢复性能
3.2.1 可见水印的防篡改性能 为了提高多媒体信息的版权信息的篡改检测性能,在嵌入可见水印时对该水印信息做了图像旋转处理,旋转角度为-0.5°.因为肉眼对这个角度的旋转几乎是不可察觉的,这样就可以通过水印抽取方法得到该可见水印子块,再用水印旋转角度评估方法对水印旋转角度进行评估.实验结果表明:在接收端使用估计方法评估得到的角度是-0.476 8°.通过设置不同的旋转角度进行多次试验,有效地验证了该水印是原来嵌入的可见水印.另一方面,可以通过提取不可见信息,验证该标识的内容是否与原来一致.
3.2.2 可见水印篡改后的恢复性能 当通过水印信息预处理步骤1)发现当前载体图像上的版权可见水印信息不是合法的,那么有必要对其进行更正,以保护该多媒体信息的版权合法性.在此使用Goldhill作为载体,以验证该可见水印算法的恢复性能,把原来的版权标示信息“华”改为“侨”,随后对其进行恢复,结果如图5所示.在验证版权信息被修改之后,本算法能在不影响载体图像质量的情况下对其进行修正.
3.3 鲁棒水印的抗攻击性能
与文献[6]鲁棒性对比,使用Baboon作为载体,并使用诸如JPEG压缩、高斯噪声、滤波、剪切等对含水印载体的图像进行攻击后,用相似度系数NC衡量鲁棒性,实验结果如表2所示.

表2 鲁棒水印的抗攻击能力Tab.2 Anti-attack capability of the robust watermark
表2中:JPEG_20表示质量因子为20的JPEG压缩(即压缩掉80%的信息).从表2可以看出:本算法的鲁棒水印对于JPEG、缩放、剪切、噪声等噪声和几何攻击有良好的鲁棒性,并且除了对高斯噪声之外的其他几类攻击的鲁棒性优于文献[6]的算法,这使得版权信息更加安全和可靠.
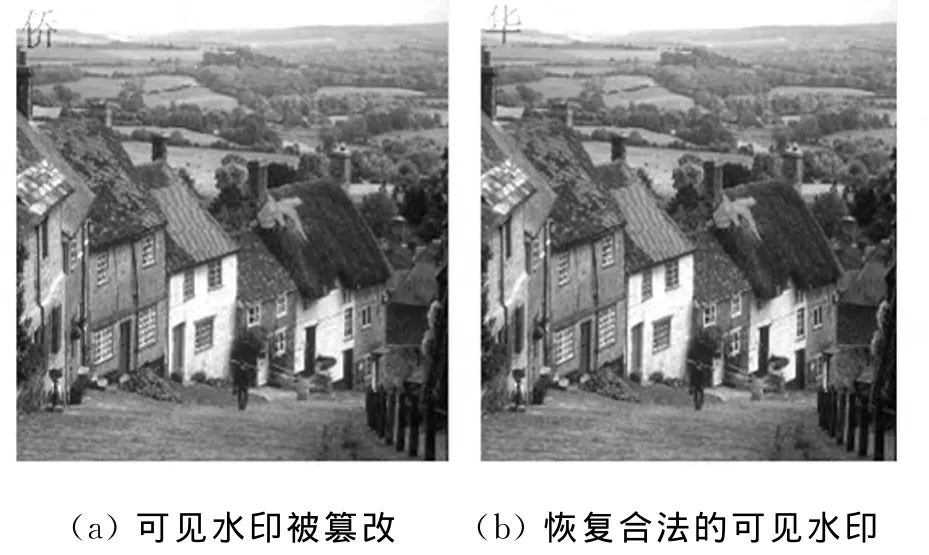
图5 可见水印信息的篡改后恢复效果Fig.5 Recovery result of visible watermark information after tampered
4 结束语
提出了一种结合水印角度旋转算法的新型双水印方案,该算法将可见水印信息进行微角度旋转后嵌入到选取的载体图像子图像中,保证了载体图像的视觉质量.不可见水印和可见水印的原始水印信息一致,增强了可见水印的篡改后恢复性能,且能起到保护可见水印的作用.实验结果表明:本算法中可见水印的可移除性良好,且在被恶意篡改之后恢复能力比较强,不可见水印对常见的JPEG、剪切、滤波、缩放等噪声和几何攻击有良好的鲁棒性.
[1] BRAUDAWAY G W.Protecting publicly-available images with an invisible image watermark[C]∥International Conference on Image Processing.Santa Barbara:IEEE Signal Processing Society,1997:524-527.
[2] HUANG Biao-Bing,TANG Shao-Xian.A contrast-sensitive visible watermarking scheme[J].Multimedia,2006,13(2):60-66.
[3] LUO Yong,WANG Jian-xin,LI Shu-xing,et al.A Lossless and visible watermarking algorithm[C]∥Third International Conference on Measuring Technology and Mechatronics Automation.Shanghai:IEEE Computer Society Conference Publishing Services,2011:95-98.
[4] CUI De-long,LING Bin.A visible watermarking algorithm based on wavelet domain with lossless recovery[J].Journal of Tibet University,2008,23(1):111-114.
[5] HSIEH W F,LIN Pei-yu.Imperceptible visible watermarking scheme using color distribution modulation[C]∥The 9th International Conference on Ubiquitous Intelligence &Computing and 9th International Conference on Autonomic & Trusted Computing.Fukuoka:IEEE Computer Society Conference Publishing Services,2012:1002-1005.
[6] ZHU Cong-xu,CHEN Zhi-gang,XU Xia.Image dual watermark algorithm based on lifting wavelet and liu chaotic system[C]∥The Sixth World Congress on Intelligent Control and Automation.Dalian:IEEE Robotics and Automation Society,2006:10476-10480.
[7] 罗永,成礼智,吴翊,等.小波变换结合纠错编码的半透明数字水印[J].计算机学报,2004,27(11):1533-1539.
[8] HU Yong-jian,KWONG S.Wavelet domain adaptive visible watermarking[J].Electronics Letters,2001,37(20):1219-1220.
[9] HU Yong-jian,KWONG S.An image fusion based visible watermarking algorithm[C]∥Proceedings of the 2003International Symposium on Circuits and Systems.Bangkok:IEEE Circuits and Systems Society,2003:III794-III797.
[10] YU Zhong-da,DONG Jun-yu,WEI Zhi-qiang,et al.A fast Image rotation algorithm for wptical character recognition of chinese documents[C]∥Proceedings of the2006International Conference on Communications,Circuits and Systems.Guilin:IEEE Circuits and Systems Society,2006:485-489.
猜你喜欢
智能计算机与应用(2022年10期)2022-11-05
空间电子技术(2021年4期)2021-11-10
现代计算机(2021年36期)2021-03-14
农业机械学报(2020年2期)2020-03-09
电子制作(2019年22期)2020-01-14
中华建设(2019年7期)2019-08-27
计算机应用(2018年12期)2019-01-07
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
系统工程与电子技术(2016年2期)2016-04-16