
螺旋桨式测风传感器自动检测系统研究与开发
2014-09-26 03:48郭颜萍张志伟崔天刚王东明
电子设计工程 2014年2期
郭颜萍,张志伟,崔天刚,王东明
(山东省海洋环境监测技术重点实验室 山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
螺旋桨式测风传感器工作稳定可靠,测量范围和准确度满足常规要求,用于测风已经多年,在各类船舶、海上和陆地气象台站应用非常普遍。测风传感器一般安装于室外,长期经受降水、结冰、风沙的侵袭,再者转动部分的机械磨损、腐蚀也会使测风传感器产生误差[1],根据有关规定,运行使用中的测风传感器必须进行周期性的检测。目前常用的方法是将测风传感器置于符合标准的风洞中进行检测[2],但是这种方法必须将测风传感器从安装地点长途运输至风洞实验室,耗时费力而且价格昂贵。因此,有必要研制一套方便快捷的自动化检测系统,以解决螺旋桨式测风传感器进行大批量、周期性检测的需求。
1 总体设计与工作原理
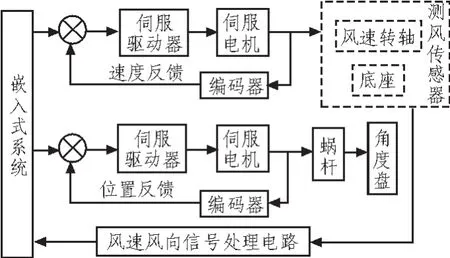
图1 自动检测系统原理框图Fig.1 Schematic diagram of automatic detection system
自动检测系统原理如图1所示,由嵌入式系统、伺服驱动器、伺服电机、编码器、蜗杆和角度盘等部分组成。风速部件检测原理:螺旋桨式测风传感器随风吹动,其风速转轴转数和输出的脉冲信号频率与风速大小基本成正比,在1~70 m/s风速测量范围内有较好的线性度。根据这一原理,利用一个伺服电机带动风速转轴连续转动,由嵌入式系统通过伺服驱动器设定不同的转速,伺服电机通过编码器将实时速度反馈给驱动器,形成一个闭环的控制系统。嵌入式系统通过信号采集电路得到测风传感器输出的实际风速值,比较风速设定值和实际值,即可得到测风传感器风速部件的检测结果。风向部件检测工作原理:测风传感器尾翼随风向变化转动,带动光电码盘电路输出格雷码,或者带动环形滑动电位器电路输出电压,可测出0°~360°的风向值。根据这一原理,将测风传感器固定在角度盘中央,尾翼固定不动,伺服电机通过蜗杆传动进而带动蜗轮角度盘同轴同角度旋转,使传感器尾翼与蜗轮角度盘作相对圆周运动[3],其步距角由嵌入式系统通过伺服驱动器设定,电机通过编码器将实时位置反馈给驱动器,形成一个闭环的控制系统。运动一周,比较角度盘示值和测风传感器输出的实际值,即可得到测风传感器风向部件的检测结果。
2 硬件设计
2.1 嵌入式系统
嵌入式系统采用基于ARM920T内核的S3C2440作为中央控制器,其内部集成了微处理器和常用外围组件,具有较高的性价比。以S3C2440微处理器为核心,设计的硬件电路框图如图2所示。存储器分为64M的FLASH和的64M SDRAM,FLASH用于存放程序代码和常量表,SDRAM用做程序的运行空间、数据和堆栈区。电源转换电路完成5 V到3.3 V,3.3 V到1.8 V和1.2 V电压的转换,提供内核和外围扩展电路所需工作电压[4]。JTAG接口用于仿真调试,键盘采用4×4矩阵式接口电路,SD卡接口采用S3C2440本身的SD卡接口控制器构建。液晶屏接口和RJ45以太网接口都需要通过外接相应的控制芯片来实现。
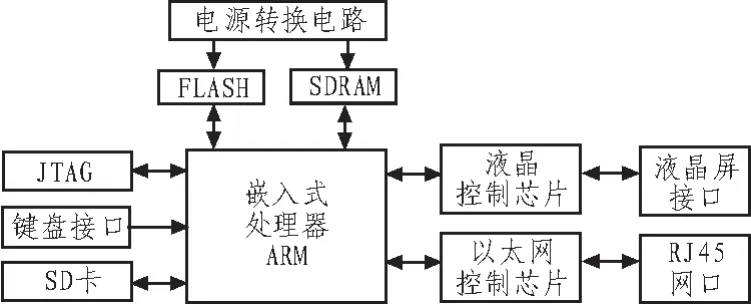
图2 嵌入式系统硬件设计框图Fig.2 Hardware block diagram of the embedded system
2.2 检测单元
风速风向检测单元包括RS232驱动器、伺服电机控制器、伺服电机、继电器、信号采集电路,电路框图如图3所示。为了防止外界干扰对嵌入式系统的损坏,利用光电隔离芯片将串口驱动电路、风速风向信号采集电路与嵌入式系统进行电气隔离。检测单元对电机的要求是精度高、转矩高、可靠性好,能实时反馈自身转速和位置信息,因此选择自带编码器的无刷直流伺服电机和配套的伺服电机驱动器[5-7]。螺旋桨式测风传感器的风速输出一般为脉冲或串口形式,据此设计了多种风速信号采集电路,风向输出一般为格雷码、电压或串口形式,据此设计了多种风向信号采集电路。操作人员通过屏幕设定传感器型号参数之后,系统软件控制继电器自动与对应的风速风向信号采集电路接通。
3 软件设计
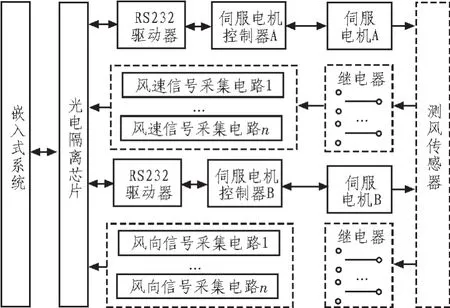
图3 检测单元硬件设计框图Fig.3 Hardware block diagram of detecting unit
系统应用软件基于嵌入式Linux平台,软件构成分成以下4个部分:引导加载程序、Linux内核、文件系统和应用程序。应用程序主要完成的功能包括提供人性化的彩色液晶显示界面、实时响应按键操作、检测风速和风向、SD卡存储、以太网通信等。为了满足风速和风向同时检测的需求,软件采用多线程的方式来实现。两个子线程的程序流程框图如图4所示。风速检测子线程中,按照GB/T 24559-2009海洋螺旋桨式风向风速计[8]中对风速检测点的要求,以及该型号传感器的参数,逐点设定测风传感器风速转轴的转速,稳定后采样测风传感器输出的实际风速值。风向检测子线程中,首先根据测风传感器风向分辨率等参数指标设定伺服电机的步距角和风向检测点n,然后每次按照步距角控制伺服电机转动,共计转动n次,采样测风传感器输出的实际风向值,并送给显示屏进行显示。所有检测点完成后,数据处理程序模块将实测值与设定值比较,如果两者的差值在允许误差范围内,则判定检测结果合格,否则如果两者差值超过允许误差,则判定检测结果不合格。
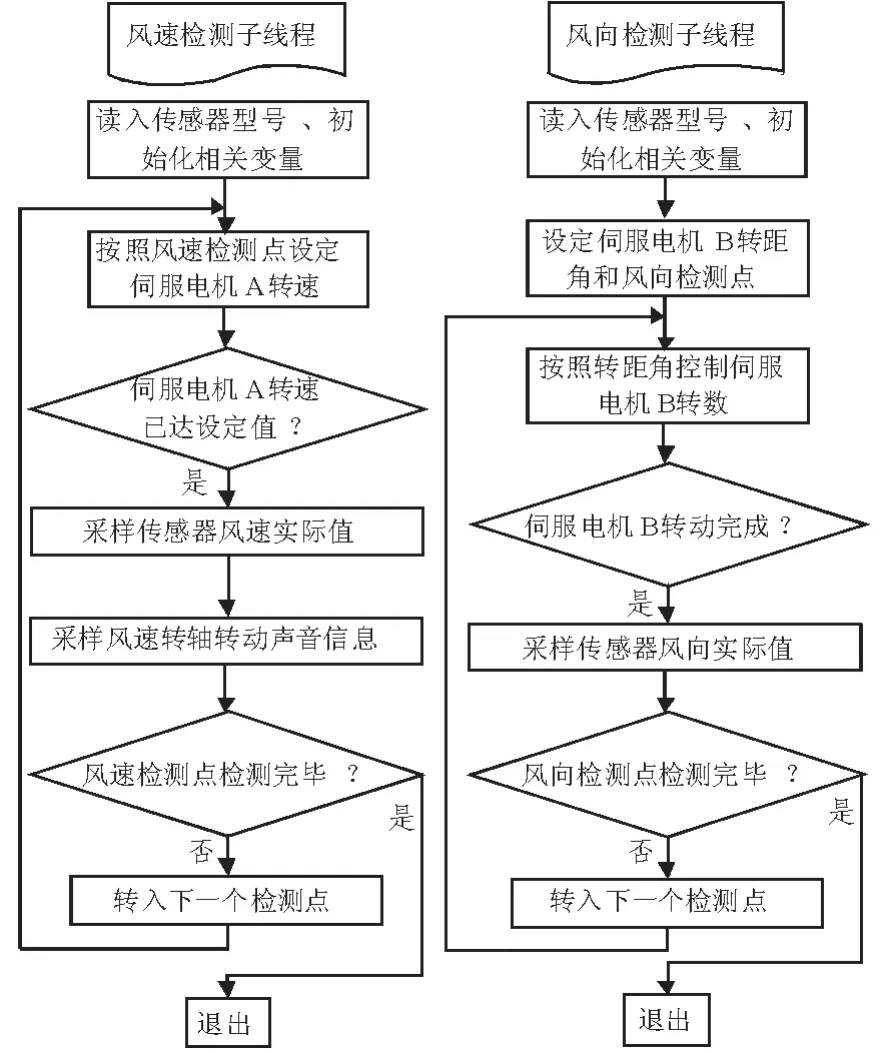
图4 风速风向检测子线程Fig.4 Child thread of detecting for wind speed and direction
4 测试运行
自动检测系统测试运行连接如图5所示。检测之前,需要进行风速转轴夹具固定、风向角度对零等一些准备工作。卸下紧固螺帽和螺旋桨,将伺服电机A通过联轴器与风速转轴联接,通过专用夹具套入测风传感器机身并固定。角度盘采用铝材制造,角度盘的圆周上均匀分布有360个蜗轮齿,并与蜗杆啮合良好。检测之前,把测风传感器安装在角度盘中心轴上,测风传感器尾翼通过支架固定不动,启动数据处理终端,在人机交互界面上选择参数设置,输入测风传感器尾翼当前所对的角度值,继而选择风向对零,软件控制伺服电机B带动蜗杆转动,进而带动角度盘绕中心轴旋转,使传感器机身投影线与角度盘上0°~180°方向一致,且传感器尾翼对准0°方向。
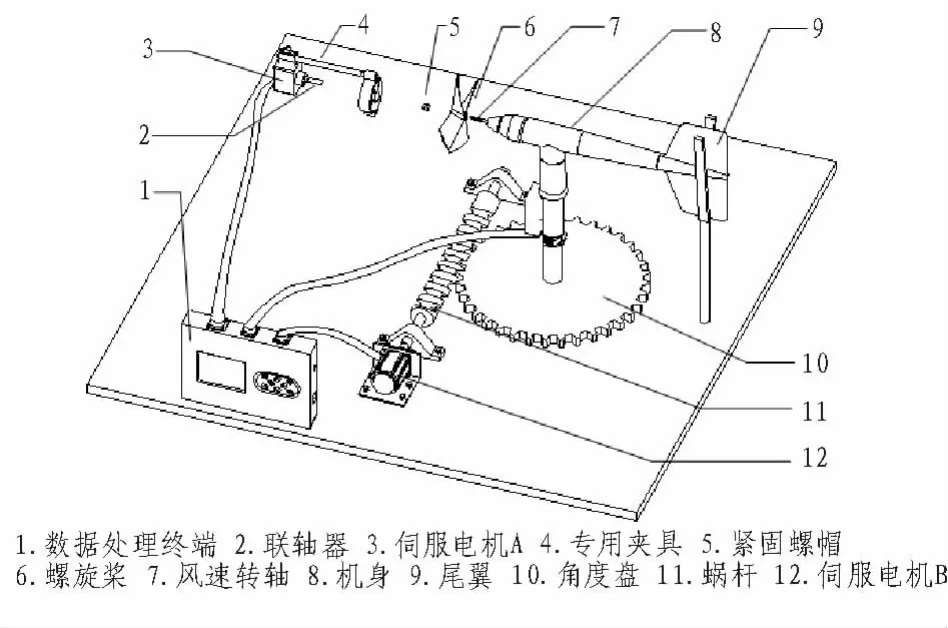
图5 系统测试运行连接图Fig.5 Connect drawing of the system working
准备工作完成以后,在数据处理终端人机交互界面上,选择风速风向检测功能后,自动检测系统自动开始对测风传感器进行测试,测试完毕显示屏显示检测结果,同时将数据通过以太网传送到远程服务器。应用该自动测试系统检测某台测风传感器,数据处理终端显示的风速和风向测试数据如图6所示。
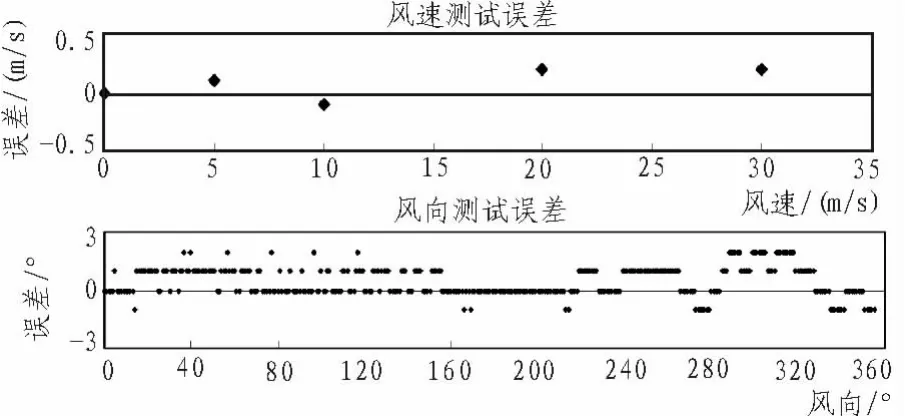
图6 风速风向测试数据Fig.6 Test data of wind speed and direction
5 结束语
本文针对设计定型后的螺旋桨式测风传感器,研发了一种拆卸方便、操作简单的自动检测系统,用于该类传感器的出厂检测、运行使用中的周期性检测等试验。主要的创新点如下:
1)系统涵盖了螺旋桨式测风传感器的多种信号输出形式,采样电路通过继电器自动接通,可对风速风向进行同时检测,大大提高了检测效率;
2)利用蜗杆蜗轮模型构建风向角度盘,采用伺服电机控制蜗杆传动进而带动蜗轮角度盘转动的方法,使风向测量精度精确到1度;
3)检测数据可通过SD卡保存在本地,也可通过以太网传送到远程服务器;
4)系统安装拆卸方便、操作简单,大大降低了检测成本,具有较高推广应用价值。
[1]刘连吉.气象仪器与测量[M].青岛:青岛海洋大学出版社,1998.
[2]江苏省无线电科学研究所.QX/T 1-2000Ⅱ型自动气象站[S].北京:中国气象局2000.
[3]边文超,郭瑞宝,韩广鲁.基于AVR单片机的风向传感器自动校准系统[J].气象科技,2012,40(2):175-179.
BIAN Wen-chao,GUO Rui-bao,HAN Guang-lu.Automatic calibration system of wind-direction sensor based on AVR single-chip compute[J].Meteorological Science and Technology,2012, 40(2):175-179.
[4]杨水清,张剑,施云飞.ARM嵌入式Linux系统开发技术详解[M].北京:电子工业出版社,2008.
[5]王军锋,唐宏.伺服电机选型的原则和注意事项[J].装备制造技术,2009(11):129-133.
WANG Jun-feng,TANG Hong.Servo motorselection principles and precautions[J]. EquipmentManufacturing Technology,2009(11):129-133.
[6]杨秀芹,姚海燕,邹开凤.基于最优控制的永磁同步电机伺服系统设计[J].工业仪表与自动化装置,2013(4):66-67,84.
YANG Xiu-qin,YAO Hai-yan,ZOU Kai-feng.Design of permanent magnet synchronous motor servo system based on theoptimal control[J].Industrial Instrumentation&Automation,2013(4):66-67,84.
[7]王法明,王鸿山.纠偏系统直流伺服电机的控制策略研究[J].工业仪表与自动化装置,2013(1):77-79.
WANG Fa-ming,WANG Hong-shan.Research on control strategy of DC servo motor of correction system[J].Industrial Instrumentation&Automation,2013(1):77-79.
[8]国家海洋局.GB/T 24559-2009海洋螺旋桨式风向风速计[S].北京:中国标准出版社,2010.
猜你喜欢
微特电机(2020年11期)2020-12-30
航空发动机(2020年3期)2020-07-24
中国诗歌(2018年6期)2018-11-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
物流技术与应用(2017年12期)2018-01-31
兰台世界(2017年10期)2017-06-01
工业设计(2016年6期)2016-04-17
小猕猴学习画刊(2015年10期)2015-10-26
中国舰船研究(2014年1期)2014-05-14
