点云检测技术在高速公路边坡监测中的应用
2014-09-22 10:30李滨王汉顺段奇三廖子敬
城市勘测 2014年4期
李滨 ,王汉顺,段奇三,廖子敬
(1.北京大学遥感与地理信息系统研究所,北京 100871;2.厦门闽矿测绘院,福建厦门 361004;3.天元集思(北京)科技发展有限公司,北京 101300;4.北京昊云科技有限公司,北京 100085)
1 引言
点云是对英文point cloud的翻译,是对利用三维激光扫描技术获取的大量的、密集的、含有多种信息的散点数据的形象表述。三维激光扫描技术获取的点云,能快速、高精度精确、全面地记录目标对象的三维空间位置信息、反射率的信息和色彩纹理信息等。点云的出现,为人们获取丰富的空间信息提供了一种全新的技术手段。测绘人员从传统的单点数据采集变为连续自动地获取多点信息的面测量,从而提高了测量的效率,拓宽了测绘技术的应用领域。
高速公路边坡监测的技术手段多种多样,目前主要采用的方法有:常规测量、GPS测量、传感器测量等。利用常规测量方式进行变形监测需要在变形体上布设监测点,需要在变形体上布设监测点,由于监测点的数量有限、测量效率低、受天气等因素影响大,测绘新技术的引入与研究对于提高边坡监测的工作的可靠性和效率有重要的意义。在监测领域,国内外也逐步开展了开展了包括灾害监测、建筑物变形监测、沉陷监测等方面的研究[1~4]。
2 三维激光扫描技术和点云
三维激光扫描技术又称作实景复制或高清晰测量(High Definition Survey,HDS),是当今最先进的测量技术的体现之一。它是利用激光测距的原理,通过记录被测物体表面大量密集点的三维坐标、反射率和纹理等信息,可快速复建出被测目标的三维模型及线、面、体等各种图件数据。目前,三维激光扫描技术主要应用领域包括文物古迹保护、建筑、规划、土木工程、工厂改造、室内设计、建筑监测、交通事故处理、法律证据收集、灾害评估、船舶设计、数字城市、军事分析等[5]。
地面型三维激光扫描仪按照工作原理可分为基于往返时间测量的脉冲式扫描仪和基于相位波测量的相位式扫描仪两大类。在边坡监测中,比较适合采用长测程的脉冲式扫描仪。
点云作为三维激光扫描技术的原始数据,从内业流程上改变了传统测绘内页的作业模式,也为更多的定量分析和精确定性分析提供了可能。点云检测就是一种常规测量手段无法实现的新型检测技术,它是利用目标对象的两期扫描点云数据,或是单期点云数据与设计模型之间的对比,以检测出不同时期检测目标的变化情况。由于点云是属于面测量,因此其相对于传统单点测量,其分析是通过对大量点的拟合和统计分析,可以削弱范围噪音,提高拟合成果精度[6]。点云检测技术用于边坡、桥梁、大坝等有需要变形监测的对象,并能够从整体上检测出目标对象的变形情况。
3 点云检测技术用于监测的流程和方法
应用点云检测技术,进行高速公路边坡的监测,其数据获取和处理的主要流程和方法如下:
(1)监测控制点的布设:控制点位埋设基础要牢固、其稳定性应不受边坡体影响,保证距离待观测边坡100 m内;
(2)控制点基准值的测定:采用常规测量手段,建立监测控制网点假设坐标系;
(3)每次扫描前要对控制点进行复测,以验证控制点是否有位移情况,待验证无误后方可进行扫描工作;
(4)利用三维激光扫描仪对待测边坡实施三维激光扫描,同时扫描标靶,拟合出标靶中心站心三维坐标;
(5)利用全站仪免棱镜功能,对标靶靶心进行坐标测量;
(6)对采集到的边坡点云数据,进行拼接,形成边坡整体点云数据,并将点云数据转换到控制点假设坐标系下;
(7)对拼接好的边坡点云数据,在点云处理软件中进行后期处理。剔除干扰数据和无效数据后,输出点云坐标文件,供三维数据分析处理软件调用;
(8)在点云检测软件Geomagic中,导入边坡两期扫描点云,剔除噪音数据后分别构建两期实体模型,利用软件的色谱分析法进行模型面对比分析。色谱分析法的原理是利用采集的点云构建出观测对象的表面模型,通过两期模型的叠加,将某一坐标轴方向上的变化分量依据其数值的大小设定不同的颜色,每个颜色代表一个变化范围,从而可视化的形成监测对象的变化情况的一个色谱图。色谱图上颜色的数量和每一个颜色代表的变化范围的大小可根据实际需要设定。通常用暖色调表示正向变化,冷色调表示负向变化。因此从色谱图中可以定性的直观地看出边坡体整体区域的变化量情况,为边坡体的稳定性分析提供更加全面和准确的依据。同时对于任何一个感兴趣的点或区域,可定量的输出其在任意空间方向上的变形量的监测报告。所以色谱分析法可以定性和定量的对点云进行检测,从而实现对目标对象的监测分析。基于点云数据利用色谱分析法进行监测的整个流程如图1所示。

图1 基于点云的高速公路边坡监测流程
关于监测的精度问题,主要涉及扫描精度和拼接精度,国内外学者对这个问题也进行了相关的研究[7~9]。本次实验中,拼接转换残差数值分析控制的公共点的拼接误差均不超过 5 mm,因拼接转换过程是扫描仪与全站仪两种相互独立测量方式的整体转换与拼接,所以该拼接精度为包含各种测量误差后的整体平差转换精度。因此两种测量方法所产生的各种误差累积不超过 5 mm,也就是三维激光扫描获取的点云用于监测所能达到的监测精度。
4 数据处理分析
本文选取了浙江上三高速公路上嵊段三处高边坡体进行监测研究的实验区域,选择006号边坡K209+672~K210+095、122号边坡 K240+903~K241+103、130号边坡:K258+749~K259+110三处不同类型的边坡作为监测试点,为完善边坡安全防控体系,探索普遍适用且科学、经济的边坡监测方案。本文以130号边坡的数据为例介绍本次研究的方法和成果。
4.1 内业数据处理的关键技术要求
后期数据处理是三维激光扫描技术应用的关键阶段,为保证监测数据分析的科学性、有效性,在外业数据获取后的内业数据处理分析阶段主要遵循以下几个关键技术要求。
(1)在同一软件、同一坐标系统中处理数据;各次扫描数据根据控制点融合,做到同一坐标系统比较。
(2)必须对无效点云数据进行删除,如植被遮挡数据、扫描范围外的多余数据及其他干扰数据等,以保证数据分析的有效性。
(3)应对扫描产生的噪音数据进行剔除,并建立实体表面模型,在表面模型上进行数据分析,提高数据分析的精度。
(4)内业对比数据分析主要工作流程如下:点云数据整理——输出有效点云数据——在点云软件中构建实体模型——不同期实体模型数据的色谱分析。
4.2 边坡数据分析
图2是130号边坡的原始假彩色点云数据。图3是两期监测数据叠加的点云检测分析,三级坡面差值在 -0.003 m~0.001 m范围之间;二级坡面两期监测数据叠加分析,左侧差值在-0.003 m~0.001 m范围之间;右侧差值在 0.000 m~0.005 m范围之间;一级坡面两期监测数据叠加分析,左侧差值在 -0.003 m~0.001 m范围之间;右侧差值在 -0.001 m~0.005 m范围之间。综合考虑仪器测量精度,可知边坡体在本观测周期内并未发生明显的变动。
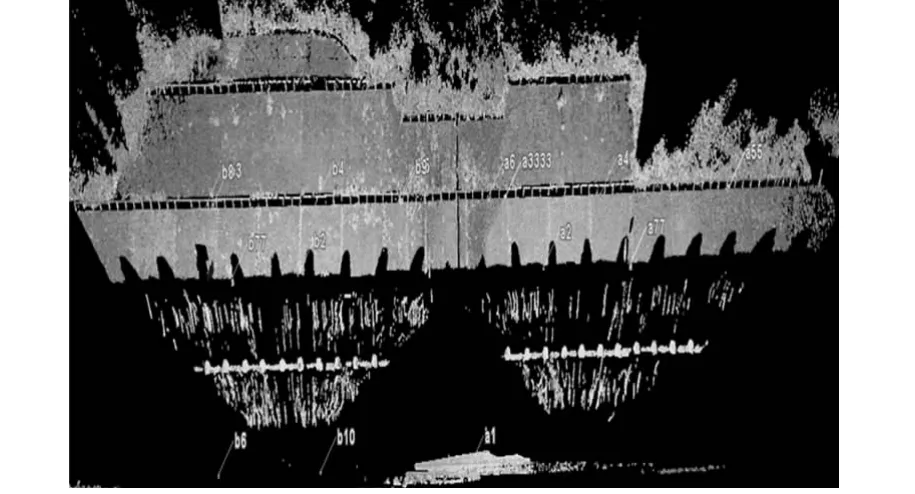
图2 130号边坡原始点云数据

图3 剔除噪音后的130号边坡色谱分析
4.3 重点部位监测
在外业测量作业过程中,通过对边坡体进行巡视,可以发现一些较明显地质灾害隐患,如边坡裂缝、边坡渗水等情况,但对于隐患部位的灾害演化情况或变化量,通过常规方法很难测定。采用点云检测技术,通过对灾害隐患部位进行精细扫描测量,建立其精细表面模型,通过对模型进行叠加对比分析,还可以测定其细微变化量,为灾害的分析预警提供科学依据。
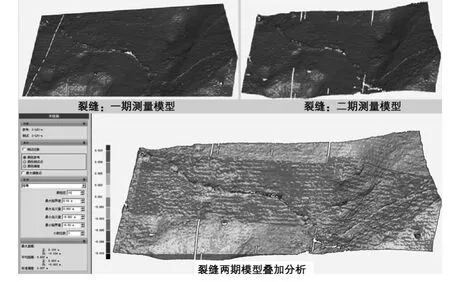
图4 130号边坡表面模型和色谱分析
图4是130号边坡的点云数据建模后得到重点部位的表面模型和色谱分析图。从图上可以清晰的得到裂隙的分布情况和变化情况,并可进行裂隙变化情况的定量检测。
5 点云检测技术用于监测的技术优势
利用三维激光扫描仪获取的点云进行边坡监测,与其他技术手段相比,其技术优势主要体现在以下几个方面:
(1)三维激光仪获取的点云是面测量方式,可以对边坡体进行整体测量,获取对象完整信息、保存测量时刻边坡状态信息、建立边坡基础数据库;
(2)点云数据将传统的单点数据采集变为连续自动的获取多点信息,将点监测变为面监测,克服传统监测以点代面的局限,可提高边坡监测工作的可靠性。
(3)测量及数据分析成果形象直观,除可以对边坡体进行整体分析外,更可以对重点监测部位进行精密监测;
(4)激光扫描非接触测量的方式、施工人员不需要靠近监测对象即可进行测量,可以实现对难以企级的目标和危险目标进行测量,确保人员安全,对道路交通无干扰;
(5)可以实现毫米级监测精度、构建模型进行数据分析后,数据精度更高;
(6)无需埋设监测设备、施工过程相对简单、监测费用不高。
6 结论
利用三维激光扫描仪获取点云数据进行高速公路边坡监测,具有速度快、实时性强、精度高、主动性强、全数字化的特点,可以快速获取真实三维场景数据,彻底改变传统测绘的单点测量的数据获取方式,为用户提供了全新的测量记录手段,更为测绘成果应用的多样性提供了可能。虽然目前点云检测技术在监测工作中应用还处于起步阶段,还有一些问题需要探讨,但它自身所具有的独特技术优势,必将成为监测技术发展的一个方向,为边坡工程安全管理及规划设计提供全新的技术支持手段。
[1]Abellán A.,Vilaplana J.M.,Calvet J.,García-Sellés D.,and Asensio,E.Rockfall monitoring by Terrestrial Laser Scanning-case study of the basaltic rock face at Castellfollit de la Roca(Catalonia,Spain)[J].Natural Hazards and Earth System Science,2011,829 ~841.
[2]张宏,李滨.灾害监测中的新技术应用[J].中国城市经济,2012(1):105.
[3]吴侃,黄承亮,陈冉丽.三维激光扫描技术在建筑物变形监测的应用[J].辽宁工程技术大学学报·自然科学版,2011(2):205~208.
[4]戴华阳,廉旭刚,陈炎等.三维激光扫描技术在采动区房屋变形监测中的应用[J].测绘通报,2011(11):44~46.
[5]李滨.徕卡三维激光扫描系统在文物保护领域的应用[J].测绘通报,2008(6):72~73.
[6]李滨,李跃明,宋济宇.地面三维激光扫描系统中的“五度”研究[J].测绘通报,2012(3):43~45.
[7]李海泉,杨晓锋,赵彦刚.地面三维激光扫描测量精度的影响因素和控制方法[J].测绘标准化,2011(1):29~31.
[8]辛培建,韦宏鹄.三维激光扫描技术中的点云拼接精度问题探讨[J].山西建筑,2012(7):219~221.
[9]石银涛,程效军,张鸿飞.地面三维激光扫描建模精度研究[J].河南科学,2010(2):182~186.
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30
科学与财富(2021年36期)2021-05-10
水电站设计(2020年4期)2020-07-16
农药科学与管理(2019年7期)2019-11-29
浙江国土资源(2019年10期)2019-10-31
建材发展导向(2019年10期)2019-08-24
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
现代工业经济和信息化(2016年22期)2016-08-23
邢台学院学报(2016年4期)2016-02-28