超大圆环内支撑变形自动化监测与分析
2014-09-22 10:30:36张西平刘俊生赵升峰
城市勘测 2014年4期
张西平,刘俊生,赵升峰
(南京市测绘勘察研究院有限公司,江苏南京 210019)
1 引言
近年来,自动化监测技术的应用范围越来越广泛,应用程度也更加深入。自动化监测技术的普遍应用,极大地把监测员从繁杂的体力劳动和不安全的工作环境中解放出来,显著地改善了人类的工作环境和提高了人类的生活质量,而且自动化监测可以克服常规监测方法涉及设备多、布点要求高、所需观测人员多及监测成本大等弊端[1]。不仅如此,自动化监测技术的应用,还明显地增强了监测数据的说服力[2]。
基坑工程自动化监测方面,付艳华[3]分析了地铁隧道自动化监测系统的组成以及工作原理,并通过实践表明自动化监测可以真实反映出隧道结构的变形情况。胡仲春[4]通过专门的数据采集装置进行自动接受、采集、传输和处理,远程监控基坑的地表位移、深部变形和相应的变形速率等,实现了对基坑支护体系变形发展的动态监控和预报。刘沛[5]利用高精度自动全站仪的自由设站加极坐标法对一级基坑进行变形监测,结果表明自动全站仪在变形监测中是快速的、准确的。周二众[6]采用自动数据采集技术、数据传输技术、数据存储技术以及数据分析处理技术,实现了对深基坑自动智能化监测。郑加柱[7]开发出了深基坑监测数据管理及可视化系统,实现了深基坑监测数据的动态管理、分析、查询及三维动画显示等功能。翟万雨[8]使用测量机器人对运营隧道进行自动化监测,并介绍了方案设计、监测方法、数据处理等重要过程。
本文借鉴已有研究,以南京新城科技园国际研发总部园为对象,介绍了用于该工程内支撑变形监测的先进仪器的性能、使用方法以及由这种仪器组成自动化监测系统的方式。对超大圆环型内支撑在施工过程中的变形进行了数据采集和处理,得到一些有益的数据,可为今后类似的监测提供一些借鉴。
2 项目背景
2.1 工程概况
拟建工程地上建筑由3幢24层综合楼、2幢20层综合楼、2幢16层综合楼以及1幢3层创意廊组成;地下为2层地下车库。基坑面积约 57500 m2,基坑总延长米约 965 m,开挖深度 9.20 m~13.50 m,基坑南北向边长约 250.00 m,东西向边长约 240.00 m。
2.2 环境概况
北侧为1幢3层建筑物,为待拆迁建筑物,且地下室外墙距离该侧用地红线约为 3.0 m;东侧用地红线外侧距离地下室外墙约 20 m处有几栋建筑物;南侧奥体大街,距离地下室外墙线最近距离约为 20 m;西侧泰山路,距离地下室外墙线最近约 15 m。基坑西侧、南侧道路下埋有较多在基坑开挖影响范围之内的管线。
2.3 地质概况
拟建场地地表层为人工填土,其下主要由全新世晚期沉积的灰黄、灰色粉质粘土,淤泥质土以及粉土、粉砂、粉细砂等组成,下部为上更新世沉积的含砾中粗砂,底部为基岩。支护设计计算所采用的土层主要物理力学性质参数如表1所示。
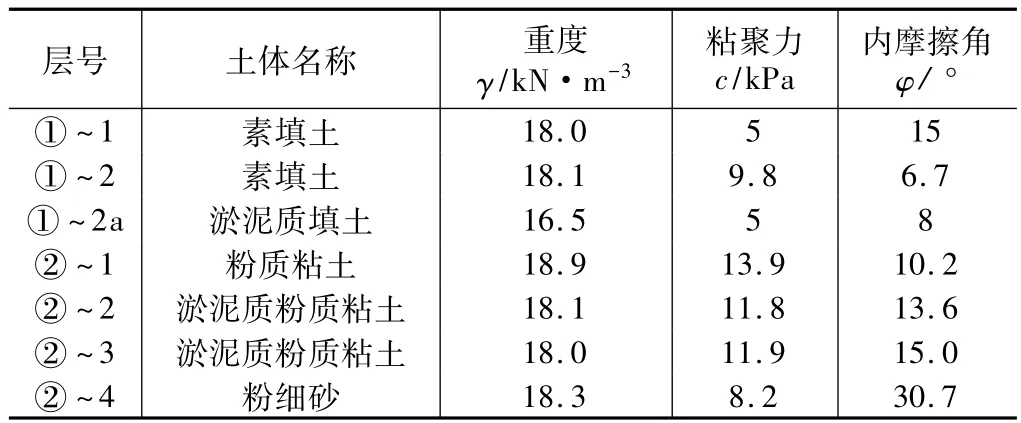
土层主要力学参数 表1
拟建场地岩土层自上而下分述如下:
①~1杂填土:松散,层厚 0.4 m~3.6 m;①~2素填土:可~软塑,层厚 0.2 m~3.0 m;①~2a淤泥质填土:流塑,层厚 1.5 m~2.6 m;②~1粉质粘土、粘土:软 ~可塑,层厚 0.0 m~2.6 m;② ~2粉质粘土、淤泥质粉质粘土:流塑,局部软塑,层厚 6.3 m~13.8 m;②~3淤泥质粉质粘土、粉质粘土:软~流塑,层厚 5.4 m~25.6 m;② ~4粉细砂:中密,层厚0.0 m~20.2 m;②~4a淤泥质粉质粘土:流塑,层厚0.5 m~4.3 m;② ~5粉细砂:密实,层厚 13.2 m~21.6 m;② ~5a淤泥质粉质粘土,层厚 0.6 m~7.3 m。
2.4 水文概况
勘探深度范围内所揭示的地层均为含水层。地下水的水理特征绝大部分属于潜水性质,但由于场地含水层中上部①层填土、②~1、②~2和②~3层粘性土和下部②~4、②~5层砂性土渗透性差异大,呈典型的“二元结构”特征,下部砂性土中的地下水具弱承压性。下部承压含水层水头埋深在地面下 1.55 m~2.10 m,高程为 4.80 m~4.85 m。由于场地孔隙潜水与下部弱承压水之间无良好的隔水层,其水位相近,弱承压水头高程较潜水位略低,水位随季节不同有升降变化,年变幅在 0.5 m左右。
2.5 基坑支护型式
本基坑工程采用顺做法施工,根据场地土层性质以及基坑周边环境保护要求,围护体采用Φ900@1100、Φ1100@1300及 Φ1200@1400钻孔灌注桩结合外侧Φ700@500双轴水泥土搅拌桩止水帷幕的形式,竖向设置二道混凝土圆环形支撑。
3 环形内支撑自动化监测
3.1 自动化监测的优势分析
由于传统的监测手段受气候环境、人为因素等影响较大,测量误差无法精确控制,监测的及时性也无法保障,故本工程对环形支撑的变形,采用自动化监测的手段实时监测。自动化的优势主要有以下几点:
①监测成果全面,应用自动监测系统控制测量机器人进行全天候监测,获取真实、完整的结构变形数据;②稳定、快速的通信技术,研发的RTU(数据采集单元)应用了 3 G无线通信技术进行通信传输,相比国内目前广泛使用的 2 G(GPRS)技术,监测时间缩短了三分之二,单点单面测量时间 8 s,双面测量时间20 s;③高精度,百米内三维监测成果精度优于0.5 mm,监测精度实例如图1所示。④自动化程度高。从数据采集、传输、稳定性分析及平差、短信报警、Web发布(生成报表)实现全自动化监测,其自动化监测流程如图2所示;⑤监测数据的连续性。数据处理系统自动判断及提醒异常基准点及监测点,保证人工及时补点,同时自动将破坏前的累计位移量统计到补点后的数据中去,保证监测数据的连续性;⑥人工辅助分析。在各阶段施工过程中,派专人定期对施工现场情况进行跟踪记录,同时亦对周边邻近项目进展情况进行跟踪记录,结合各项目施工状况综合分析支护结构变形的真实原因。采用人工辅助与自动化相结合的监测方案,大大节约了监测成本,定期进行人工辅助监测,当人工自动化比测成果出现较大差异的时候,立刻由控制系统提高自动化监测频率,及时分析数据,找到真实的变形值,为基坑安全提供准确、及时的检测数据与预警预报;⑦短信实时预警。监测系统及时将报警值、警戒值分级发送给相关人员,同时进行人工辅助分析变形原因。
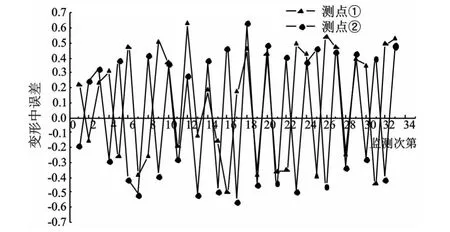
图1 监测精度
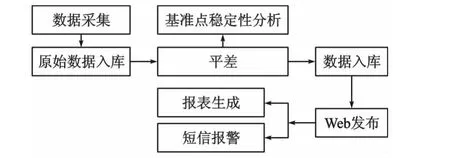
图2 自动化监测流程
3.2 自动化监测方案设计
本工程环形支撑变形监测使用一套Leica TM30(0.5″,0.6+1 ppm)测量机器人(Georobot)进行自动变形数据采集,采用南京市测绘勘察研究院有限公司最新研发的“南京地铁隧道结构自动化监测系统”进行管理。自动变形数据采集设备与自动化结构监测系统的高度融合,形成从自动数据采集、数据处理、数据分析、预警预报和数据传输分发高度智能的自动化安全监测管理系统。图3为自动化监测系统结构图。
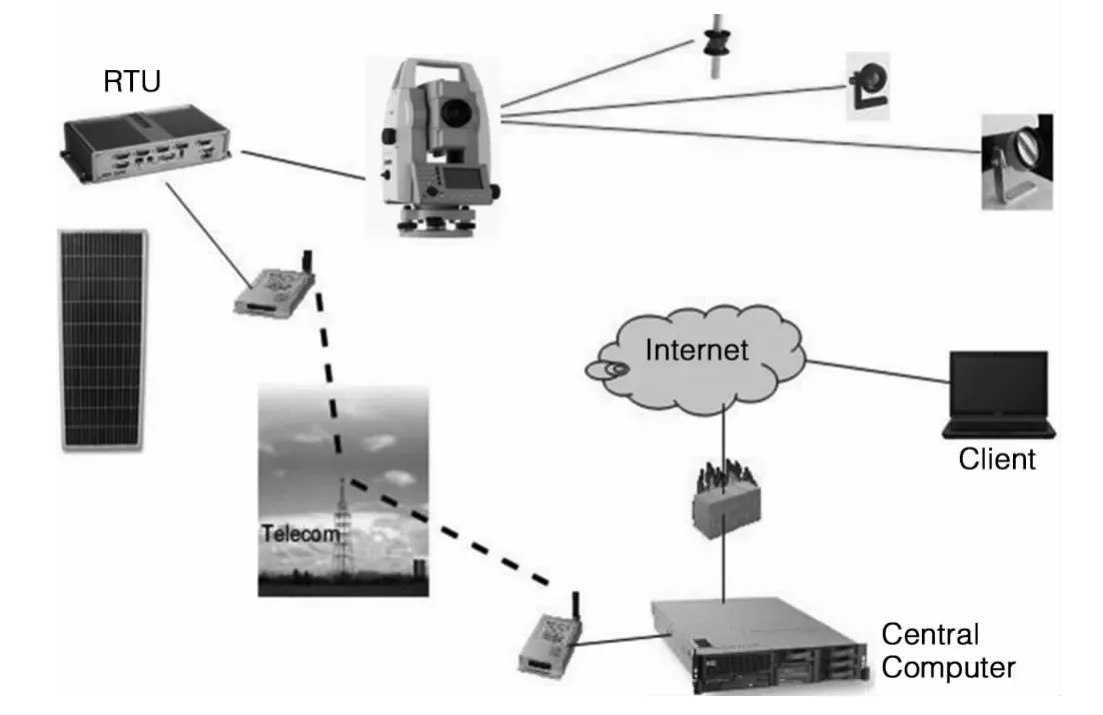
图3 自动化监测系统示意图
高程采用相对高程系;平面采用相对坐标系(起算边方向为Y轴方向,X方向垂直于Y轴方向)。在点位及设备埋设时,统一考虑人工及自动化监测设备及点位埋设,尽快实施自动化监测。基准点作为变形监测的起始依据,其稳定性十分重要。基准点要求稳定可靠,在基坑变形区外 100 m~300 m布设1个基准点组,基准点组布设8个L型迷你棱镜;全站仪上架设Leica 360°同轴棱镜作为基准传递点,且在工作基点公共断面上布设360°小棱镜基准传递点。基准点组布设示意图如图4所示。
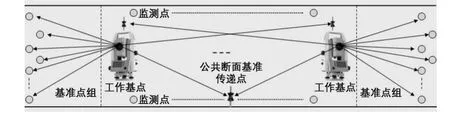
图4 基准点布置示意图
根据TM30(0.5″,0.6 mm+1 ppm)的标称精度及实测数据的比较分析,我们推算出其在测距 100 m范围内三维测量精度可达到 1 mm以内,满足《城市轨道交通工程测量规范》的相关要求。根据此项标准,工作基点在基坑南侧新城科技园大楼顶部布设一个强制对中支架,用于架设测量机器人进行数据采集。
3.3 监测点的布设
一道混凝土支撑,沿圆形支撑每 50 m左右设置一组变形监测点,每组布设2个监测点,分别布设在圆形支撑的内外环对应位置,一道环形支撑共布设位移变形点共计24个;受通视条件影响,二道环形支撑大多被一道支撑遮挡,故其变形监测点的布设密度放宽至 100 m左右,二道环形支撑共布设12个变形监测点。测点布设位置及分布情况如图5所示。
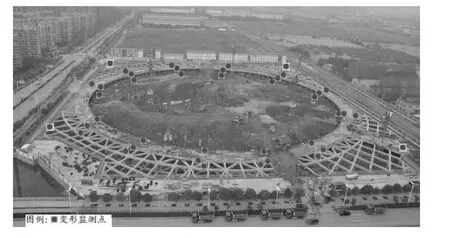
图5 监测点布置示意图
另外,在一道支撑系统的4个拐角各设置1个临时观测墩,每个观测墩上设置1个变形监测点。观测墩同时作为人工测量的工作基点使用,具体的布点方法如图6所示。

图6 监测点及观测墩的布设图
3.4 基准网测量
(1)基准网高程测量。自动化监测垂直基准为基准点组,首次采用任意设站三角高程法与对应位置的人工垂直基准点进行联测,以得到各基准点组内8个L型迷你棱镜的高程,之后由自动化监测系统实时观测。
(2)基准网平面坐标测量。由一个工作基点与基准点组构成监测网坐标框架,采用极坐标法获取基准网初始坐标,其余工作基点的平面坐标依次通过基准传递点传递与解算获取,最终闭合至另一基准点组。初始坐标值观测两次,每次水平角观测4个测回,平距观测2个测回,两次坐标计算值互差不大于 1.2 mm时,取平均值作为各基准点的初始坐标值。
(3)监测点测量。在工作基点上安置测量机器人并与RTU相连接,通过“南京隧道结构变形自动化监测系统”对测量机器人进行基准点、工作基点、监测点的数据采集和数据通讯管理(可以多台测量机器人协同作业),首次需进行学习测量,本次使用1台测量机器人进行观测,对基坑支护结构进行安全监测,实时发现支护结构的形变,监测网测量要求如表2所示。
全站仪型号为LeicaTM30,其主要技术参数为测角精度为0.5″,测距精度 0.6 mm+1 ppm。初始值应连续测量两次,其两次X、Y、Z较差值小于 1.5 mm时,取中数作为初始值,反之重测直至符合要求为止。

监测网测量要求 表2
4 数据处理与监测成果分析
4.1 自动化监测数据处理
自动化监测数据处理系统自动对数据进行平差处理及报表生成,具体步骤为:先将监测数据进行分类,第一步对监测数据进行置信度检验,剔除不合理(异常)的监测数据,第二步将受基坑开挖影响的数据分离出来,第三步留下观测质量好的数据,利用建好的数学模型进行数据处理分别研究支护结构在不同环境下的变形情况。
各监测点在工作基点平差成果的基础上用支导线的方法计算获取X、Y、Z,这样可以更加客观的反映支护结构变形情况。根据监测点的X、Y、Z值计算平面、垂直位移量,同时计算支护结构差异垂直位移。当个别监测点破坏时,应及时布设监测点,恢复正常监测。
4.2 自动化监测成果分析
研究拟定合理的数学模型,在项目的中后期通过大量的监测数据对其进行验证调试,最终获得较稳定的变形预测模型,对环形支撑变形趋势进行预测预报。
图7(a)、(b)和(c)为同平面相同位置处内外环支撑变形曲线。由于施工过程中,部分监测点位被遮挡,无法测得完成的数据,所以在图7中给出部分完整测试数据的环形支撑变形结果。由图看出,在基坑开挖过程中,随着基坑深度的不断加深,支撑各测点都呈线折线波形,其间支撑变形累计最大为BX1监测点,其值达到 8.65 mm。


图7 同平面相同位置处内外环支撑变形曲线
从图7看出,圆形支撑折线波变形,但是同平面同位置内外两圆环梁的变形趋势接近。其相对位移差较小。环形支撑梁变形,大致是由温差、施工荷载和轴力荷载引起的,而且前期变形小,后期大,这与基坑开挖加深,支撑轴力加大是一致的,尤以环形梁径向杆件梁端及附近为大。
图8(a)和(b)为同一支撑环上不同测点处支撑变形曲线。从图中看出,除了BX1监测点个别监测频次中变形较大外,其余各测点变形变化幅度平稳。同一圆形支撑上各个监测点的支撑变形规律较一致,总体上反映了环形内支撑的变形规律,这与理论计算的结果接近。以监测时间间隔和变化量计算分析,平均每天变化量在 0.2 mm以内,非常小,趋于稳定。各测点变化量也均很小,都在 -0.5 mm~0.8 mm之间,反映出超大环形内支撑在基坑应用中是合理的,自动化监测的手段也是可行的。
5 结论
(1)基坑支护体系的自动化监测系统具有安装简单、成本低廉、操作方便等特点,具有良好的实施性和操作性。实时有效地对基坑支撑体系变形进行自动化监测和控制,对基坑支护体系的稳定有着非常重要的作用。
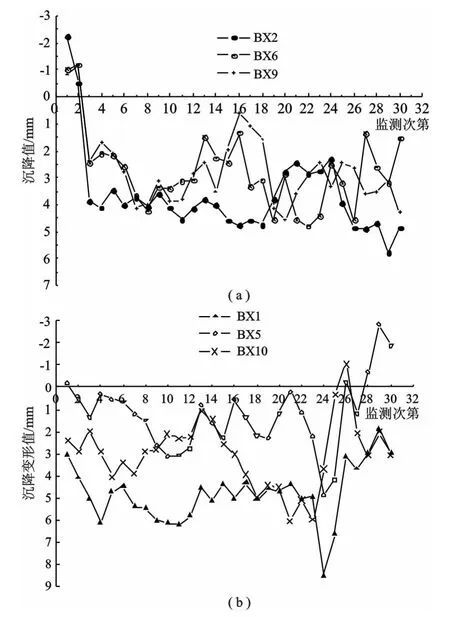
图8 同一支撑环上不同测点处支撑变形曲线
(2)自动化监测实现了自动观测、数据实时传输、变形趋势可视化显示等全自动化作业,克服了传统测量方法的不足,极大地提高了工作效率。
(3)随着地下建设规模的扩大。基坑规模不断增加,涉及的测量范围也越来越广,特别在内支撑变形控制测量方面,自动监测已经成为必不可少的一种测量方法和手段,发挥着日益重要的作用。
[1]庞红军,卫建东,黄威然.基于测量机器人的深基坑围护结构变形监测技术探讨[J].隧道建设,2012,32(4):552~556.
[2]付艳华,冯玮光,宋责生.既有地铁线隧道结构的自动化监测[J].矿山测量,2012(4):81~83.
[3]胡仲春,任高峰,崔云龙.软土基坑支护体系监测的自动化管理[A].第2届全国工程安全与防护学术会议,2010.
[4]刘沛.自动化全站仪在高层建筑基坑变形监测中的应用[J].测绘与空间地理信息,2011,34(2):239~231.
[5]翟万雨,徐顺明,闫文斌.自动化监测在广州地铁工程中的应用[J].工程建设与设计,2011(6):153~156.
[6]周二众.基于测量机器人的深基坑安全监测预警系统研究[D].重庆:重庆大学,2012.
[7]戴加东,王艳玲,褚伟洪.静力水准自动化监测系统在某工程中的应用[J].工程勘察,2009(5):80~84.
[8]郑加柱,李国芬,光辉.深基坑监测数据管理及可视化系统开发[J].城市勘测,2008(4):158~160.
猜你喜欢
煤气与热力(2022年4期)2022-05-23 12:44:56
华中建筑(2022年4期)2022-04-14 07:50:52
建材发展导向(2021年22期)2022-01-18 06:12:28
水利水电科技进展(2021年6期)2022-01-07 02:58:02
建材发展导向(2021年18期)2021-11-05 09:19:04
建材发展导向(2021年12期)2021-07-22 08:06:52
现代测绘(2021年1期)2021-04-28 10:19:56
水电站设计(2020年4期)2020-07-16 08:23:48
建材发展导向(2019年3期)2019-08-06 04:43:10
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55