自适应阈值激光光斑中心定位方法研究
2014-09-22 10:30徐亚明束进芳安动动
城市勘测 2014年4期
徐亚明 ,束进芳,安动动
(1.武汉大学测绘学院,湖北武汉 430079;2.精密工程与工业测量国家测绘地理信息局重点实验室,湖北武汉 430079)
1 引言
摩天楼是现代城市的图腾,是当今建筑技术高度发达的标志,是城市实力的象征[1]。我国目前在建的摩天大楼总数已超过200座,预计未来3年,平均每5天就有一座摩天大楼封顶[2]。在摩天大楼的施工过程中,为了指导平面控制网的竖向传递,了解和掌握超高层建筑物的周日变形是十分必要和不可缺少的工作。目前,常用的超高层建筑物周日变化监测方法有全站仪法[3]、正倒垂仪法[4]、倾斜仪法[5]等,而上述方法存在着设备昂贵,易受施工环境影响,不利于自动化连续监测等缺点。由于激光具有截面形状不随传播距离变化、抗传输介质干扰能力强和传播距离远等特点,采用激光准直法来对超高层建筑物进行周日变化监测具有很大优势。
激光准直法超高层建筑物周日变化监测的基本原理为利用工业测量相机拍摄激光准直仪发射出来的激光光斑,对激光光斑图像进行处理,最终得到超高层建筑物的周日变形规律。对激光光斑图像处理的关键技术是提取光斑图像的中心,这需要首先提取光斑的边缘,再利用相应的算法计算中心点的位置。基于图像二值化的边缘提取方法简单,但其分割阈值不好确定,而现有的最大类间方差法[6,7]以及迭代法[8]等对具有小面积比特点的激光光斑图像分割效果不理想。于是本文提出一种针对激光光斑图像的自适应阈值图像二值化分割方法,然后提取二值化图像的边缘并利用最小二乘椭圆拟合来确定其中心。实验结果表明,该方法计算量小,实时性好且定位精度高。
2 激光光斑中心位置的确定
确定激光光斑中心的位置,首先需要确定光斑的区域范围,这就需要对光斑图像进行预处理。同时想要得到光斑的具体位置,还需要获得圆环区域的外边界,因此需要寻找一种自适应的方法对光斑图像进行分割,即本文将提到的自适应阈值的二值化方法。除了得到分割后的二值图像之外,还需要进一步提取图像的边缘,对边缘点拟合,求取拟合后图形的中心点的坐标,这样才能够真正获得激光光斑中心的坐标。
2.1 自适应阈值二值化
无衍射激光束图像具有同心圆特征,且激光光斑图像在图像处理中表现为R波段有较强的分量,这是由人眼的视觉效应所引起的。因此,首先要提取R波段的分量,再利用数学形态学法对提取出的光斑图像进行滤波处理,消除噪声干扰的影响。在对去噪后的激光光斑进行二值化处理时,针对光斑图像的亮度与相机的曝光量成一定比例关系的特点,提出一种自适应二值化阈值计算方法,对光斑图像进行二值化分割,提取图像边缘。本文所提出的自适应二值化阈值的计算方法,是在迭代法的基础上衍生出来的一种方法,其具体做法如下:
(1)计算经过滤波去噪处理后的光斑图像的平均像素值T0,作为图像分割的初始阈值:

式中:g(i,j)是图像中(i,j)的灰度像素值。
(2)根据初始阈值T0将激光图像分为目标和背景两个部分,同时计算出目标所占图像区域的范围imin,jmin,imax,jmax。
(3)计算目标范围内所有像素点的像素平均值Tl:

(4)根据图像亮度与相机曝光量之间的关系,以步骤(3)中确定的阈值Tl乘以比例系数K(经大量实验验证,此处K值为0.8)作为最终二值化的阈值Tf,对图像进行二值化分割。

2.2 椭圆拟合中心定位
在进行椭圆拟合中心定位之前,需要提取上述二值化图像的圆环边缘坐标作为输入数据。利用边缘追踪的方法来提取输入数据的边缘信息,其具体提取过程如下:
(1)利用重心法计算出光斑的大体的中心位置;
(2)以此中心位置作一条水平线,沿着该水平线找寻像素突变点;
(3)以每一个突变点为起始点,通过边缘追踪寻找每个圆环的边缘点。
由于激光束图像具有同心圆特征,需要针对提取的每个圆环进行最小二乘拟合。本文利用椭圆方程对提取的边缘进行拟合,椭圆的一般方程为[9]:

其中(xi,yi)(i=1,2,…n)为每个圆环边缘的坐标。
椭圆拟合完成之后,计算椭圆拟合的残差和中误差。将计算所得的残差较大的点以及中误差过大的椭圆剔除掉,进行二次拟合。同样计算二次拟合的中误差和残差,直到拟合之后的残差符合要求。拟合出的椭圆的中心坐标可按下式计算:

计算得出每个椭圆的中心坐标之后,取所有椭圆中心的坐标平均值作为最终的中心定位坐标:

其中(Xi,Yi)为每个拟合椭圆的中心坐标,m为拟合椭圆的总个数。
对激光光斑图像处理最终获取其中心坐标的处理流程图如图1所示:
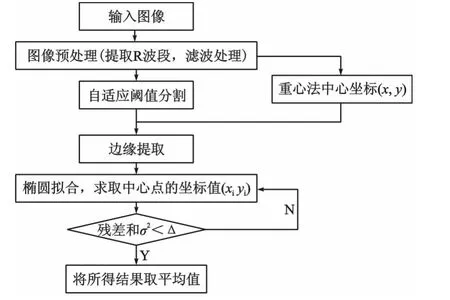
图1 激光光斑中心提取流程
3 实验分析
为了验证本文所提方法的实用性和定位精度,选取了一栋15层的大楼进行了模拟实验。将激光准直仪架设在一楼,工业测量相机分别架设于距离激光准直仪约 10 m,50 m的楼层处,分别拍摄不同情况下的激光光斑图像,然后利用本文的算法提取 10 m,50 m及 50 m加噪声(高斯白噪声)情况下的激光光斑中心坐标。并与最大类间方差法阈值分割的结果、局域亮度最大值法[10]以及重心法[11]的结果进行了比较,实验结果如表1所示。

不同激光光斑中心定位方法结果及时间比较 表1
从表1所显示的结果可以看出,重心法,局域亮度极大值法和本文的方法定位结果相近,而利用最大类间方差法所获得的阈值对图像进行二值化分割,再提取边缘并椭圆拟合进行中心定位,所得到的结果与本文选用的方法以及局域亮度极大值法和重心法所得到的结果的差异较大,进一步验证了最大类间方差法不适用于小面积比的激光光斑图像。具体比较了最大类间方差法和自适应阈值法所计算的阈值,前者所得到的阈值要远远小于后者,且两者之间不存在任何比例关系。
同样,在表1中,对于 50 m加噪声的图像,重心法的结果与其他几种方法相比偏差较大,主要是因为在滤波处理的过程中噪声没有被完全剔除造成的影响。应用本文所提出的方法可以完全避免噪声未剔除干净而产生的影响。对于 10 m,相对距离较近的激光光斑图像,由于其能量发散的小,表现出来的同心圆图像就像一个光斑一样,不能提取出每一个亮环的亮度极大值及其对应的像素位置,故此时无法利用局域亮度极大值法计算中心坐标。
在图像处理过程中,从每种方法的运行效率来看,最大类间方差法和本文方法所花费的时间相差不多,一般所花费的时间为 200 ms左右。重心法的运行效率较高,仅需几十毫秒,局域亮度极大值法处理完一幅图像通常需要花费一千多毫秒。而重心法受噪声的影响较大,综合来看,本文方法具有较好的时间效率。
为了更好地说明本文算法的准确性,本文还采取了将相机测量得到的结果与步进机的结果进行对比。首先对相机进行标定,将相机坐标系下的坐标转换至实际坐标系下,然后将激光准直仪架设于步进机上,将工业测量相机架设于 50 m处进行拍摄。通过移动步进机,记录步进机移动的长度与光斑图像移动的距离,再将两者的结果进行比较,其结果如表2所示。

步进机的移动距离与本文算法提取的中心移动距离之间的比较 表2
表2的结果显示了步进机的移动距离与圆环中心之间移动距离的比较,且计算了实验测试过程中的点位移动的中误差,结果表明本文的算法具有较高的精度。
4 结语
本文提出的适用于小面积比的激光光斑中心定位算法首先通过自适应阈值对图像进行二值化分割并提取边缘,再利用最小二乘椭圆拟合确定光斑中心位置。对比试验表明,该方法较最大类间方差法阈值分割、局域亮度极大值法以及重心法具有更高的定位精度以及时间效率。该方法适合用于解决激光准直法周日变化监测系统中的激光光斑中心定位问题。
[1]郑方,冯琪.浅议超高层办公建筑的功能与设施[J].城市建筑,2010(8):28~31.
[2]中国在建摩天大楼超过二百座[J].共产党员,2012(18):26.
[3]殷文彦,黄声享,刁建鹏.超高层倾斜建筑周日变形监测数据分析[J].测绘信息与工程,2008(2):19~21.
[4]赵小阳,刘业光.超高层建筑平面控制网竖向传递实践与研究[J].测绘信息与工程,2010(4):28~29.
[5]喻永平,黄伟明.利通广场超高层建筑日周期摆动监测方法研究[J].测绘通报,2012(S1):134~135.
[6]齐丽娜,张博,王战凯.最大类间方差法在图像处理中的应用[J].无线电工程,2006(7):25~26,44.
[7]王茜,彭中,刘莉.一种基于自适应阈值的图像分割算法[J].北京理工大学学报,2003(4):521~524.
[8]冯驰,孟浩.双光斑中心识别算法比较[J].应用科技,2009(8):21~24.
[9]俞缙,吴亮清.基于椭圆拟合的人工标志中心定位法[J].郑州轻工业学院学报·自然科学版,2009(4):75~78.
[10]常治学,王培昌,张秀峰.一种基于局域亮度极大的环栅激光图像边缘检测[J].光电子激光,2008(4):546~548.
[11]孔兵,王昭与谭玉山.基于圆拟合的激光光斑中心检测算法[J].红外与激光工程,2002(3):275~279.
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
无线互联科技(2020年22期)2021-01-11
弹箭与制导学报(2020年2期)2020-09-01
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
摄影之友(影像视觉)(2019年3期)2019-03-30
传感器与微系统(2018年7期)2018-08-29
自动化学报(2017年4期)2017-06-15
小天使·六年级语数英综合(2017年5期)2017-05-27
现代工业经济和信息化(2016年19期)2016-05-17