基于OTSU改进的布匹检测算法研究
2021-01-11 13:52:34解祥新江小静刘琴琴
无线互联科技 2020年22期
解祥新,江小静,刘琴琴,魏 燕
(南通理工学院,江苏 南通 226002)
0 引言
基于阈值分割的布匹疵点检测算法可以大致分为以下几个步骤,首先对采集到的布匹图像进行降噪,消除无关信息,增强细节对比度等[1],再利用阈值分割算法进行图像分割,最后将得到的分割后的图像进行疵点分类等后续处理。在实际生产中,疵点类型主要以破洞、断经为主[2],因此本文中所检测的疵点类型基本为破洞、断经。
1 改进最大类间方差法
OTSU全称最大类间方差法,该方法将待检测样本的前景和背景分离开来。本文将素色布匹的正常底纹看作背景,把待检测素色布匹的瑕疵区域看作前景。通过OTSU阈值分割算法把素色布匹瑕疵区域和标准纹理背景信息进行解耦[3],得出的最佳阈值将布匹瑕疵与纹理背景分割开来,实现瑕疵检测。
最大类间方差算法具有检测周期短和运算速度快等优点[4],可以满足工业现场的实时检测要求。
传统最大类间方差算法原理:假定待检测的素色布匹图像共有L个灰度级,nq是灰度级为q的像素点个数,则图像灰度级的概率Pq如下式:
(1)
K级灰度以下像素的灰度概率均值和累积值分别是ωk和μk,如式(2)和式(4)所示:
(2)
ω(L-1)=1
(3)
(4)
假设按照灰度阈值T把待检测素色布匹样本图像分为布匹正常底纹和表面瑕疵区域两类:C0类(灰度级为从0到T),C1类(灰度级为从T+1到L-1)。则C0类和C1类两类的概率公式为式(5)和式(6)所示:
(5)
(6)
两类的均值可以用式(7)和式(8)表示:
(7)
(8)
对于整个图像来说,其灰度均值为式(9):
μ=μ0ω0+μ1ω1
(9)

(10)
传统的最大类间方差法的缺点:
(1)对于一些灰度级不连续的图像来说,通过传统的最大类间方法所计算出来的阈值很难收敛到全局最优。
(2)若背景图像与前景图像分布差异非常大,那么最大类间方差算法将有可能会失效。
(3)当图像中仅有两种类别时,最大类间方差能够很好地适用;但是当超过两种类别时,就需要改进增加额外阈值,来进行分割。
因此针对以上传统最大类间方差法的缺点进行如下改进:
(1)计算图像灰度级L。计算图像的灰度平均值μT,将μT取整|μT|作为图像的灰度级,即L=|μT|;
(2)给分割次数赋以初始值J=1;
(3)利用最大类间方差法计算图像的像素N、阈值K、阈值选择函数η、类内方差σw;
迭代,N(J)=N;K(J)=K;L=K;η(J)=η;σ(J)=σw;J=J+1;
(4)如果J≤1,那么返回步骤3;若大于1,则计算出ε的值。
(11)
(5)如果ε≥0,那么返回步骤3;若小于0,则查找最大η(J)所对应的阈值,作为最佳阈值K。
2 实验步骤及仿真
本节算法的流程如图1所示。
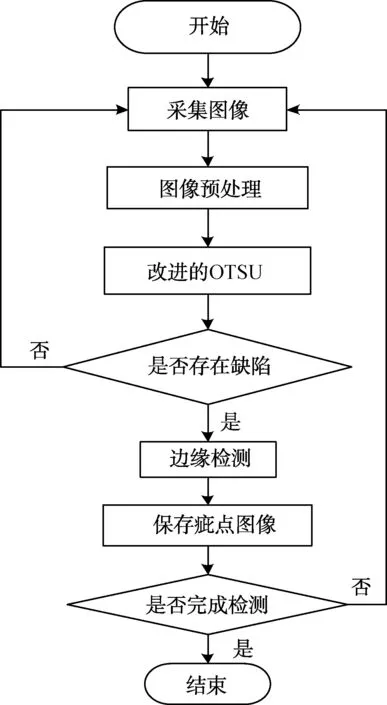
图1 基于改进最大类间方差法的检测算法流程
具体步骤如下:
步骤1:采集现场布匹图像,进行双边滤波处理,经过双边滤波处理之后能够较好的滤除低频信息,减少低频信息的干扰,并且能够很好地保存图像边缘处的细节信息。双边滤波的数学表达式如下:
(12)
其中,(k,l)为模板窗口的中心坐标;(i,j)为模板窗口的其他系数的坐标;σd为高斯函数的标准差。
步骤2:将双边滤波处理后的图像再通过中值滤波滤除斑点噪声及椒盐噪声,中值滤波在降噪的同时也能够有效保存边缘处的细节。用中值滤波处理双边滤波处理后的图像g(i,j):
G(x,y)=mid{g(x-a,y-b),a,b∈W}
(13)
其中,G(x,y)为进行中值滤波后的二阶矩阵,W为选择的二维模板,选取3×3的区域;
步骤3:将预处理后的图像,利用改进的最大类间方差法进行阈值分割。计算图像灰度级L,计算图像的灰度平均值μT,令L=|μT|;给分割次数赋以初始值J=1;利用最大类间方差法计算图像的像素N、阈值K、阈值选择函数η、类内方差σw;再进行迭代,直到计算出最佳阈值K。
步骤4:分割完成后判断是否存在疵点,如果不存在疵点,则继续采集图像进行疵点检测;若存在疵点,则进行边缘检测,标识出疵点,进行数据保存后,再继续采集图像。
传统最大类间方差法在阈值分割时,并不能很好地将疵点分割出来,而通过改进的最大类间方差法,能够很好地分割出疵点。传统最大类间方差法检测准确率只有78%,而改进后的最大类间方差法检测准确率可达到94%。
3 结语
本文主要研究基于改进最大类间方差法的检测算法。并通过实验仿真分析这种算法在针对无样本的疵点检测上精度高,具有一定的效果。
猜你喜欢
弹箭与制导学报(2020年2期)2020-09-01 02:08:56
深圳职业技术学院学报(2020年3期)2020-06-19 09:20:52
计算机与生活(2019年8期)2019-08-12 02:11:34
传感器与微系统(2018年7期)2018-08-29 00:44:42
软件导刊(2018年4期)2018-05-15 08:31:14
中国诗歌(2017年12期)2017-11-15 04:04:05
自动化学报(2017年4期)2017-06-15 20:28:55
人生十六七(2015年21期)2015-11-14 03:22:54
物联网技术(2015年1期)2015-01-26 15:26:22
电视技术(2014年3期)2014-09-17 10:27:08