基于粒子群算法的隔振体系参数优化研究*
2014-09-18 06:20朱大勇卢剑伟
湖南大学学报(自然科学版) 2014年11期
黄 伟, 徐 建, 朱大勇,卢剑伟
(1.合肥工业大学 土木与水利工程学院,安徽 合肥 230009;2.中国机械工业集团公司,北京 100080;3.安徽土木工程结构与材料省级实验室,安徽 合肥 230009;4.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
单自由度、双自由度体系是研究设备振动隔离的主要模型方法,且隔振体系性能与隔振参数关系密切,选择合适的参数,能提高系统的隔振性能,如果参数选择不当,就会适得其反,所以隔振参数的优化研究显得非常必要.文献[1]将遗传算法与最大熵法结合,给出了两级隔振系统参数优化设计的一种混合方法;宋鹏金等[2]采用傅里叶变化法和直接积分法分别对时域函数和频域函数进行参数优化,提出了一种锻锤隔振参数优化的新方法;文献[3]根据超精密隔振器的内部结构和隔振系统的布置形式,建立了超精密隔振系统的动力学模型,并在此基础上推导出理论频响函数、进行了系统参数的辨识研究;LIU等[4]基于整星隔振体系进行了参数优化;ESMAILZADEH[5]采用梯度优化方法对汽车悬挂体系进行了隔振参数的优化研究;文献[6]提出了一种隔振参数线性变化的方法,主要通过刚度迟滞模型实现;刘春嵘等[7]基于反共振原理在小振幅假设下建立了两级浮筏系统的数学模型,并分析了隔振机理,推导出了力传递率的表达式.
作为新型的群智能算法——粒子群优化算法(PSO)自1995年提出以来,就因其简单、易实现、收敛快,可调参数少等优点得到了广泛应用[8].由于传统粒子群算法的局限性,许多学者对其做出了改进.Shi[9]等提出了关于权重的线性调整策略,获得了满意的优化效果;李军等[10]在Shi的基础上提出了自适应权重变化策略,克服了传统粒子群算法寻优过程的早熟情况,能使粒子群算法达到局部最优及全局最优的平衡.Coello等首次提出了多目标粒子群优化算法(MOPSO),掀开了多目标优化问题的新篇章,主要思想是通过Pareto最优解集决定粒子飞行方向以及在全局知识库中得到之前发现的非支配向量,以指导其它粒子飞行[11].
状态反馈控制是振动控制领域的常用方法,通常包括线性二次型最优控制、极点配置控制、基于观测器的控制器等,由于实际问题的不确定性,鲁棒H2/H∞控制被提出并广泛应用[12].上述方法在机械、结构等振动控制领域中发挥了巨大作用,其实质是通过控制器产生基于输出的反馈控制力,以优化控制系统响应.
1 粒子群算法
1.1 标准粒子群算法
粒子群优化算法模型中,每一个粒子的自身状态都由一组位置和速度向量描述,分别表示问题的可行解和它在搜索空间中的运动方向.粒子通过不断学习它所发现的群体最优解和它在搜索空间中的运动方向,并不断更新它所发现的群体最优解和邻居最优解,从而实现全局最优解.粒子的速度和位置更新方程是PSO的核心,由式(1)表示:
vij=ωvij(t)+c1r1(pbestij(t)-xij(t))+
c2r2(gbestij(t)-xij(t)),
(1)
xij(t+1)=xij(t)+vij(t+1).
(2)
式中:i为第i个粒子;j为粒子的第j维;vij为粒子i在进化到t代时的第j维飞行速度分量;xij为粒子进化到t代时的第j维位置分量;pbestij为粒子i在进化到t代时的第j维个体最优位置pbesti分量;gbestj为t代时整个粒子群的最优位置gbest的第j维分量;c1,c2为加速因子或称学习因子;r1,r2为(0,1)间的随机数;ω为惯性权重系数.
1.2 改进的(单目标)粒子群算法
为了平衡标准PSO算法的全局搜索能力和局部搜索能力,本文使用如式(3)的自适应惯性权重公式[9]:
(3)
式中:ωmax,ωmin分别为惯性权重的最大值和最小值;f为粒子当前适应度值;favg,fmin分别为所有粒子适应度值的平均值和最小值.
1.3 多目标粒子群算法
多目标粒子群算法的主要计算步骤如下所述:
Step1:初始化粒子群,计算各对应粒子的目标函数向量,将其中的非劣解加入到外部档案之中;
Setp2:初始化粒子的局部最优值pbest和全局最优值gbest;
Setp3:在搜索空间内,通过式(1),(2)调整粒子的飞行速度和位置,形成新的pbest;
Step4:根据新的非劣解维护外部档案,并为每个粒子选取gbest(档案的内容决定全局最优值的选取);
Step5:是否达到最大迭代次数,若否则继续计算,若是则停止计算,输出pareto最优解集及全局最优解.
多目标粒子群优化算法与单目标粒子群优化算法的主要区别就是全局最优解的选取方式及外部档案的设定和更新.需要着重指出的是,关于全局最优解的选取问题;对于多目标优化,直接计算会存在一组等价的最优解集,很难从每一次迭代中确定一个全局最优解.解决该问题最直接的方法即是利用Pareto支配的概念,考虑档案中的所有非劣解,并从中确定一个“主导者”,通常采用密度测量的方法来确定全局最优解.本文将采用基于粒子最近邻拥挤程度评判的最近邻密度估计方法[13],当然还有其它类似的方法,如核密度估计法等[14].
2 单自由度隔振体系
图1中,mp,kp和cp分别为隔振对象的质量及隔振体系的刚度和阻尼,xg为环境荷载,并设其为简谐形式.其动力学方程为:
(4)
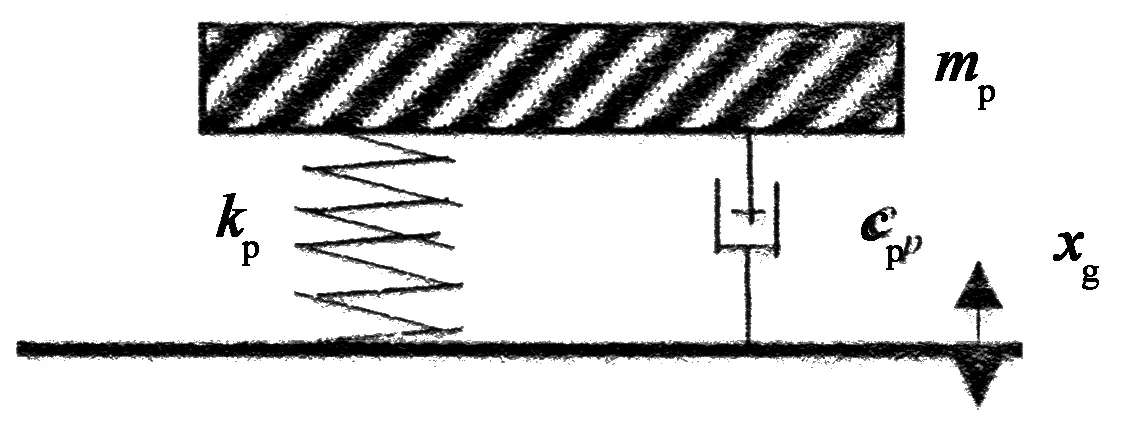
图1 单自由度隔振体系
假设初始状态为零,对其进行s=jω的拉氏变换:
(5)
再对式(5)进行拉氏反变换可得式(6)和式(7).
隔振对象的加速度传递率:
(6)
隔振对象与地面的相对位移传递率:
(7)

位移、速度传递率与式(6)相同,相对速度、相对加速度传递率与式(7)相同,在此不再赘述.
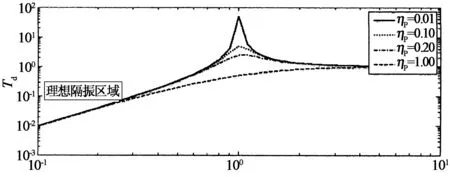
隔振的目的是希望隔振体系进入理想隔振区域,对于图2理想隔振区域,即TA<1,ω/ωp越大,ηp越小,传递率越小.然而,由图3可知,盲目地降低ωp,则可能会使Td>1,TA,Td很难共同达到最优,无法同时进入理想隔振区域,该趋势可由图4的多目标优化Pareto前沿可见,为此,我们将针对双自由度隔振体系展开研究.

ω/ωp
ω/ωp

TA
图4为基于MOPSO算法而进行的多目标优化计算,并考虑式(6),(7)作为目标函数,算法设定为2维,每维记为swarm(i),i=1,2,ηp=swarm(1),ω/ωp=swarm(2),参数搜索范围任意设定为:[0.01,0.01]~[100,100];算法参数设置为:迭代次数50,粒子群数50,学习因子c1=2,c2=2,惯性权重ωmax=0.9,ωmin=0.4.
3 双自由度隔振体系
图5中,kp,kb,cp和cb分别为隔振体系的刚度和阻尼;mp为隔振对象质量;mb为安置平面或者基础cpmp质量;xg为环境荷载,并设其为简谐形式.

图5 双自由度隔振体系
动力学方程如式(8)所示:
(8)
传递率推导与2节相同,在此,不再赘述.
对于该双自由度隔振体系,我们更关心的是隔振对象的响应(即绝对位移、速度、加速度)及它与安置平面(基础)间的相对响应(即相对位移、速度、加速度)问题,而对于安置平面(基础)的响应,在此,不予考虑.由此,可得式(9)和式(10).
隔振对象的加速度传递率:
(9)
隔振对象与安置平面的相对位移传递率:
(10)

位移、速度传递率与式(9)相同,隔振对象与安置平面相对速度、相对加速度传递率与式(10)相同,在此不再赘述.
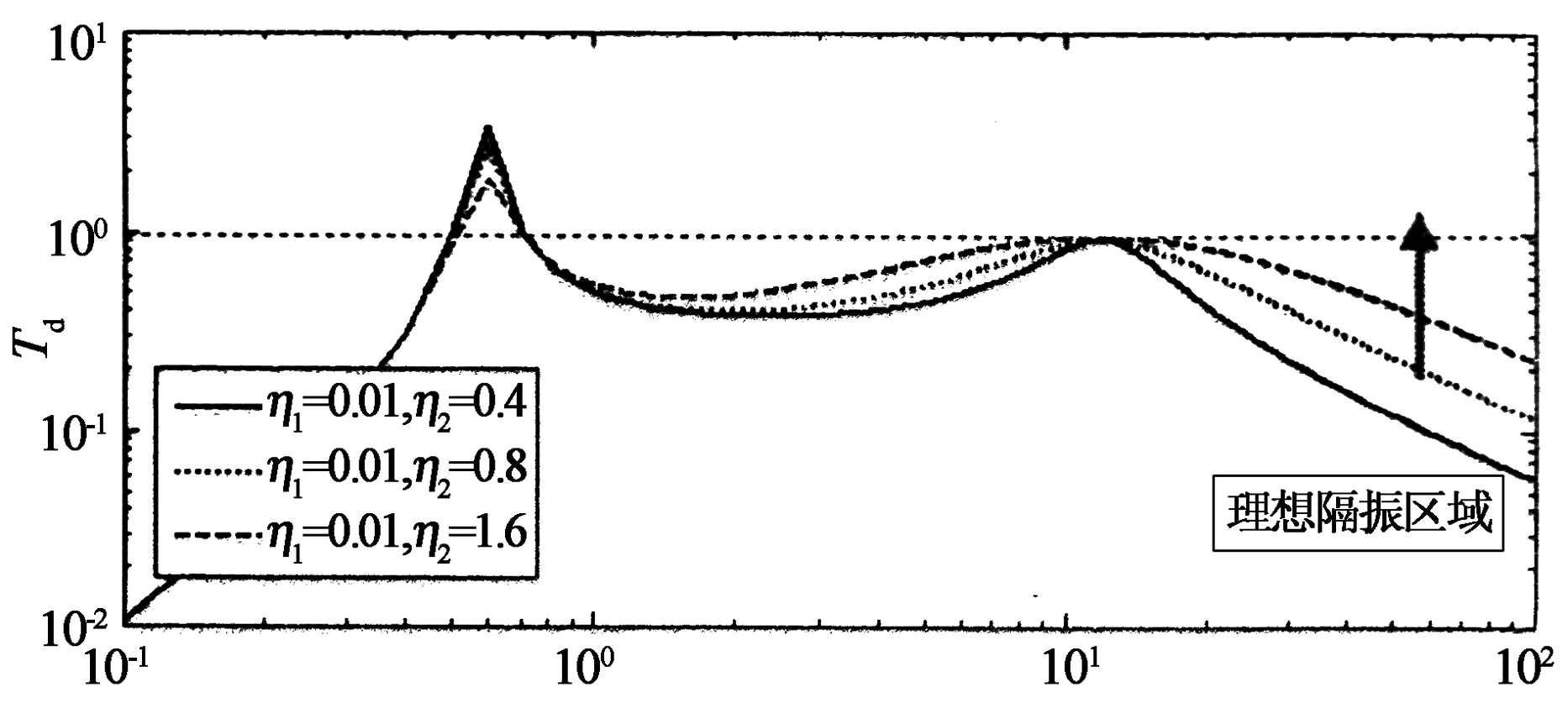
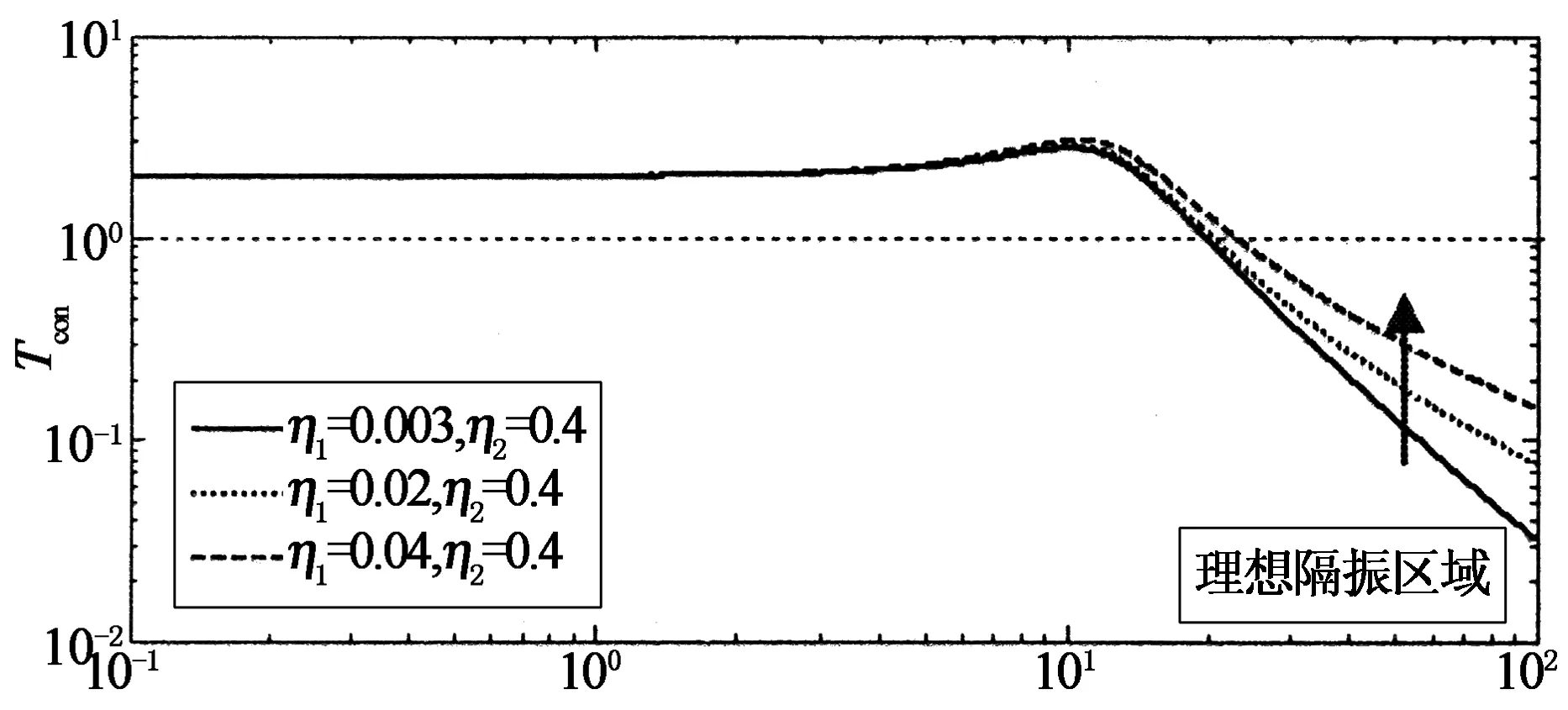
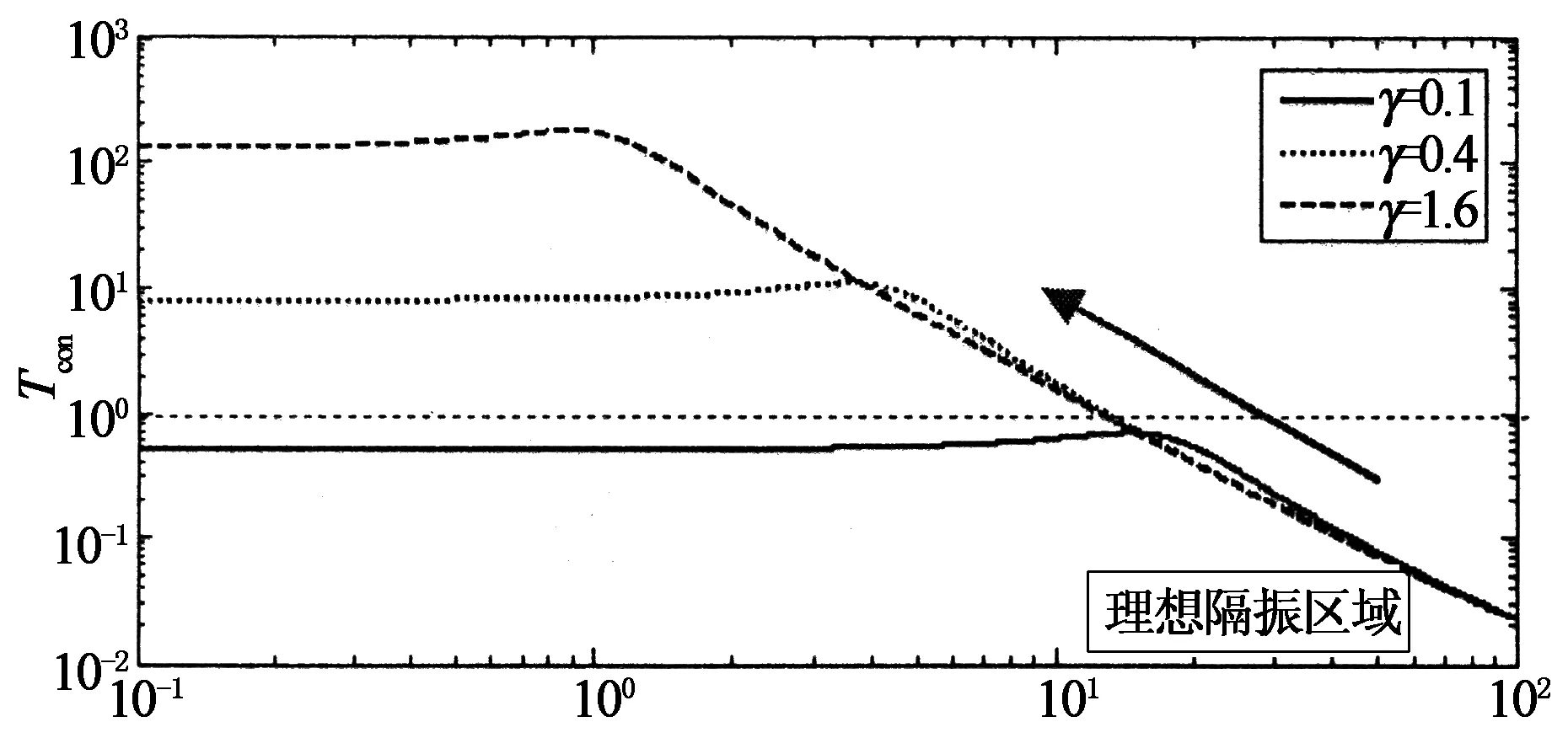
由图6(a)~ (c)可知,随着η1,η2,μ的增加,理想隔振区域的TA增加;而γ的变化规律则相反.

ω/ωp
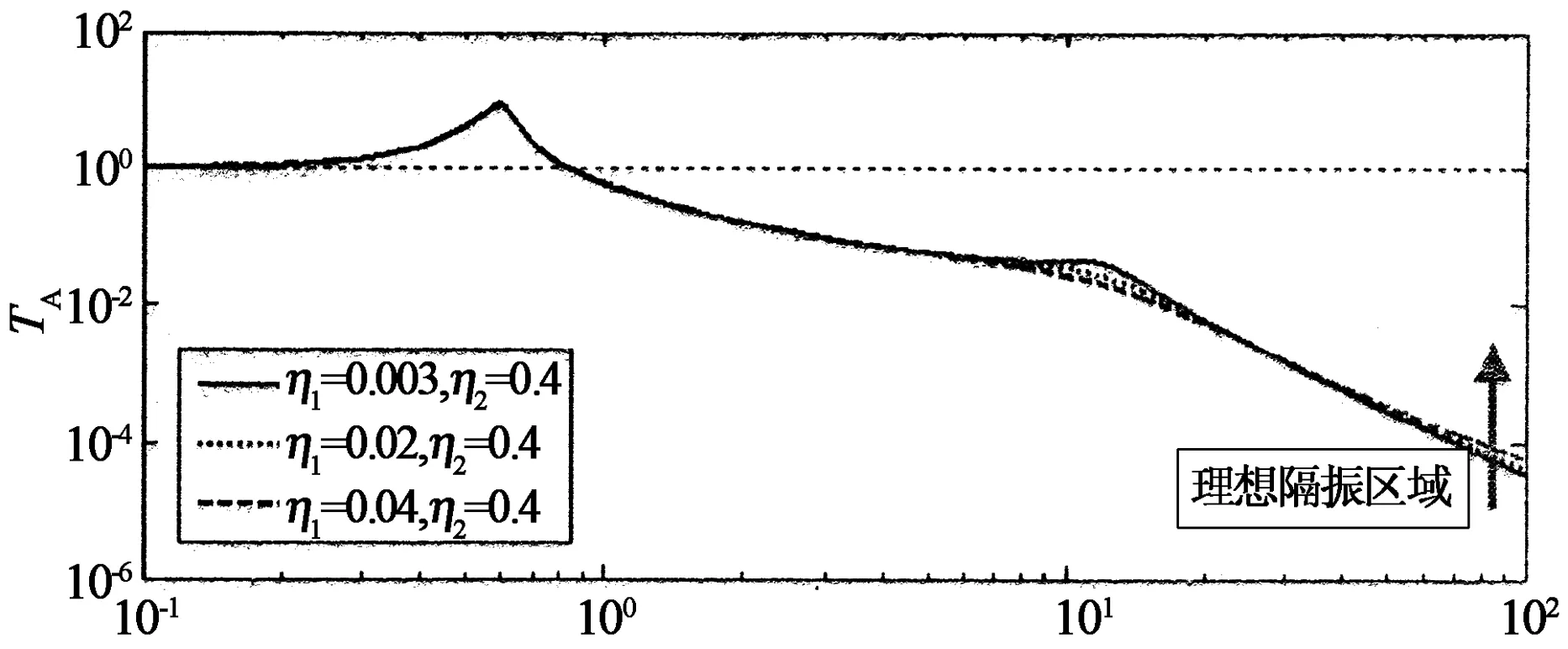
ω/ωp

ω/ωp
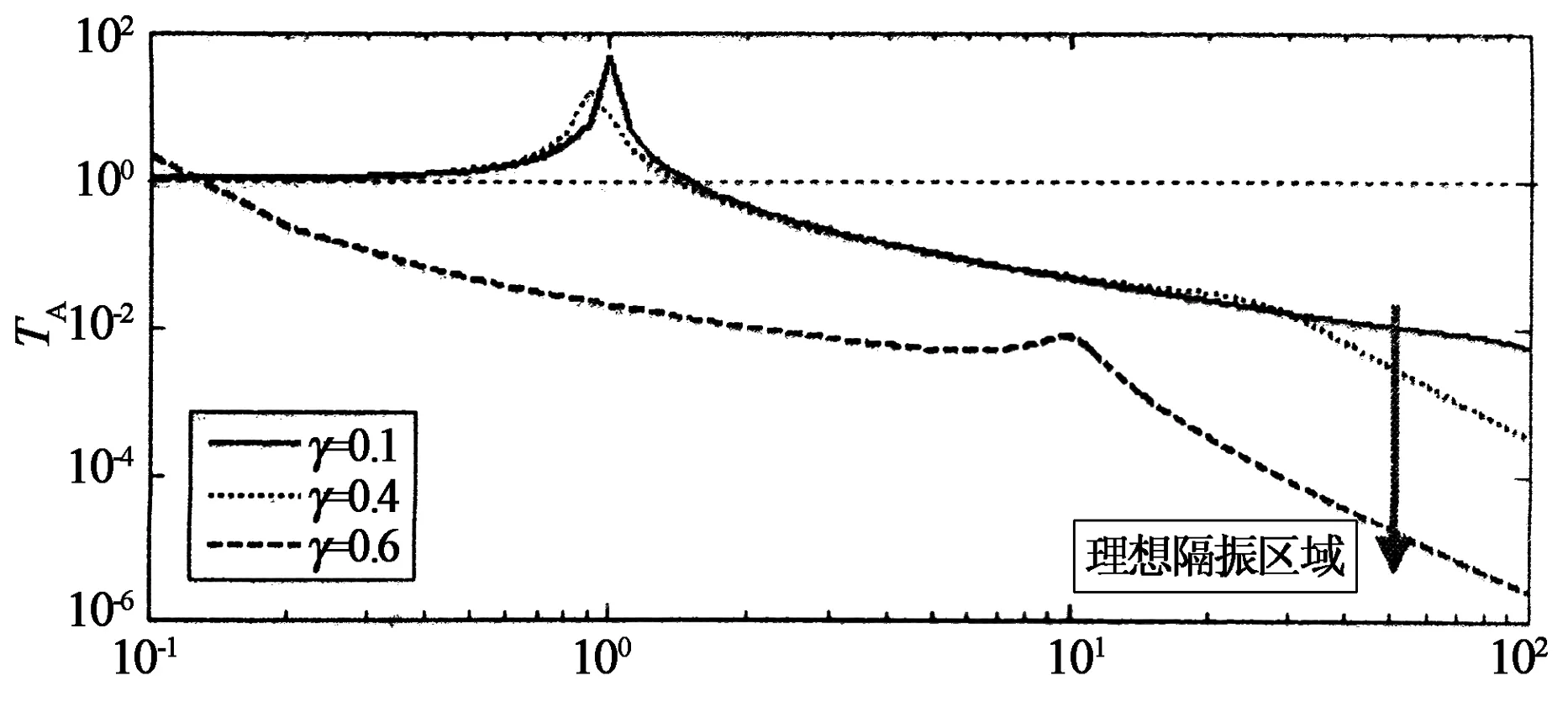
ω/ωp
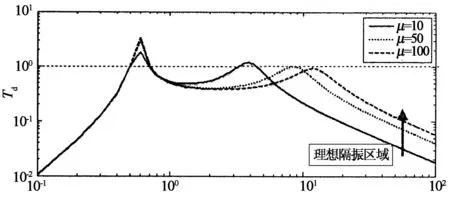
由图7(a),(c)可见,随着η2,μ的增加,理想隔振区域中Td亦增加;随η1的增加先出现小范围的增加,随后基本保持不变;并随γ的增加而有所降低.
此外,由图6和图7可见,通过合理隔振参数设置,TA,Td都可以达到某一较低值,这与单自由度体系(图2,图3)不同.所以,在实际应用中,更倾向于双自由度隔振体系.
ω/ωp

ω/ωp
ω/ωp

ω/ωp
算例1
给定某隔振对象,质量mp=1×105kg,干扰荷载频率ω=30 Hz,进行最优隔振参数设计.

(11)
Y=[z1-z2,z3]T=Cz+Dw.
(12)

同时考虑式(9),(10)作为目标函数,基于MOPSO算法进行多目标优化计算,算法设定为5维,每维记为swarm(i),i=1~5,且η1=swarm(1),η2=swarm(2),μ=swarm(3),γ=swarm(4),ω/ωp=swarm(5),搜索范围任意设定为:
[0.01,0.01,0.01,0.01,0.01]~[100,100,100,100,100].
最优参数计算结果为:
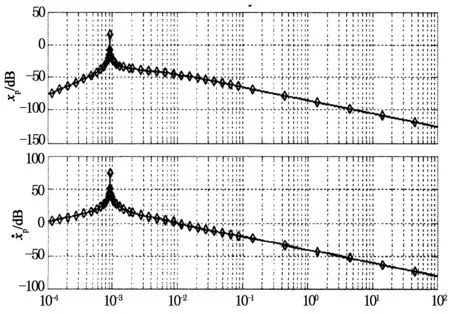
η1=99.932 3,η2=0.010 1,μ=100,γ=95.560 8,ω/ωp=44.932 1;系统响应可由式(11), (12)计算,结果如图8所示.

TA
由图9,目标控制输出的响应良好,对于常见频率范围的荷载隔振作用明显.以上计算考虑的是无控隔振情形,那么对于工程振动中常用的状态反馈控制,能否在此基础上,进一步优化隔振体系呢?
F/Hz
4 双自由度状态反馈控制系统
双自由度振动控制系统如图10所示.考虑控制力后,系统的动力学方程由式(8)变为:

(13)

图10 双自由度振动控制系统
同样地,设定如下形式的状态变量:

(14)
式中:A,B2,B1表达如下.
Y=[z1-z2,z3]T=C1z+D11w+D12u.
(15)
式中:C1,D11,D12形式如下.
y=[z1-z2,z4]T=C2z+D21z+D22u.
(16)
式中:C2,D21,D22形式如下.
则基于观测输出的状态反馈控制力为:
(17)
对于极点配置算法、线性二次型最优算法以及H2/H∞算法等产生的一类反馈控制力均可由式(17)表示;K不考虑“±”号,因为在给定参数寻优范围内,K的产生正负随机.
整合式(14)~(17)可得:
Tzw(s)=C1[sI-(A+B2KC2)-1]-1B1.
(18)
对式(18)进行s=jω的拉氏变换可得由Y到w的传递函数矩阵为:
TYw(s)=C1[sI-(A+B2KC2)-1]-1B1.
(19)
考虑传递函数矩阵的无穷范数:
f‖TYw(s)‖∞.
(20)
事实上,将式(17)代入式(14),(15),总可以得到如式(21)形式的状态空间方程:
(21)
即反馈控制力仅使原无控隔振体系,变为修正了的“无控”隔振体系,状态空间方程形式不变.
算例2
问题同算例1,试在状态反馈控制的基础上,计算最优控制器,以进一步优化隔振体系.
方法1在算例1计算所得隔振参数的基础上,进一步计算最优反馈控制器.
考虑式(20)作为目标函数,基于改进的(单目标)粒子群算法进行优化计算,算法设定为2维,每维记为swarm(i),i=1,2,即为状态反馈控制器K的两维;参数范围任意设定为:[-1×105,-1×105]~[1×105,1×105];改进的(单目标)粒子群算法参数设置同算例1;优化计算所得的反馈控制器为:[-0.5097,1]×105.优化结果如图11所示.
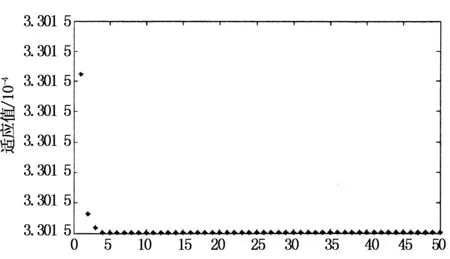
迭代次数
方法2重新实时计算最优隔振参数及最优控制器.
考虑式(20)作为目标函数,基于改进的(单目标)粒子群算法进行优化计算,此时算法设定为7维,每维记为swarm(i),i=1~7,前5维对应隔振体系参数η1,η2,μ,γ,ω/ωp,后两维对应状态反馈控制器K;参数范围任意设定为:
[0.01,0.01,0.01,0.01,0.01,-1×105,-1×105]~[100,100,100,100,100,1×105,1×105];改进的(单目标)粒子群算法参数设置同算例1;经优化计算所得的最优隔振参数及最优控制器为:
η1=100,η2=100,μ=17.3495,γ=0.01,ω/ωp=0.01;
K=[-1.2553,7.6560]×104.优化结果如图12所示.
由图13可知,在算例1的无控最优隔振参数的基础上施加反馈控制,并不能有效地进一步优化隔振体系.事实上,数值试验表明,增加参数的寻优范围,如提高至106或107数量级,响应与图13基本无异;这说明在最优隔振参数的基础上,进一步施加反馈控制没有意义,因为此时的最优参数已并非真正地“最优”了;由图14可知,重新实时计算最优参数及控制器,反馈控制的介入可进一步优化原最优无控隔振体系.

迭代次数

F/Hz

F/Hz
5 考虑控制力传递率
对式(13)进行s=jω的拉氏变换,可得:
(kp-ω2mp+jωcp)Xp-(jωcp+kp)Xb=
-U[kp+kb-ω2mb+jω(cp+cb)]Xb-
(kp+jωcp)Xp=U+Fequal.
(22)
设受控后,隔振对象的响应为零,即Xp=0,则控制力的传递率可表示为式(23):
(23)
式中:Xp,Xb,U分别为xp,xb,u的振幅;Fequal为环境荷载产生的等效作用力.

ω/ωp
ω/ωp

ω/ωp
ω/ωp
由图15可知,控制系统进入共振区之前,传递率基本保持不变;进入理想隔振区域后,控制力传递率随η2先增加而增加,随后基本保持不变;随η1,μ的增加,传递率减小;随γ的变化共振峰显著偏移.
如何合理地设置隔振参数,使控制力尽可能减小,这样,既能保证隔振体系正常工作的传递率要求,又能有效地减小控制能源消耗,亟待研究.
算例3
试在算例2中方法2的基础上,考虑控制力传递率,计算最优隔振参数及最优控制器.
同时考虑式(20),(23)作为目标函数,基于MOPSO算法进行优化计算,算法设定为7维,每维记为swarm(i),i=1~7,前5维对应隔振体系参数η1,η2,μ,γ,ω/ωp,后两维对应状态反馈控制器K;参数范围任意设定为:
[0.01,0.01,0.01,0.01,0.01,-1×105,-1×105]~[100,100,100,100,100,1×105,1×105];优化计算所得的隔振体系参数为:
η1=0.01,η2=88.175 9,μ=0.01,γ=0.01,ω/ωp=36.837 6;最优控制器K=[5.979 5,-9.919 6]×104.优化结果如图16所示.

TYw
由图17可知,兼顾控制力传递率的隔振体系较算例2中的方法2隔振效果有所降低,但耗费较少的控制能源,且隔振效率依然较优,对于实际工程,我们往往更青睐这种较低能耗的控制方式.

F/Hz
6 结 语
基于粒子群优化算法,以控制输出的传递率为目标函数,在单自由度、双自由度隔振体系传递率分析的基础上,分别进行了隔振参数的单目标和多目标优化设计研究.传统的振动控制设计,往往是在已知隔振参数的情况下创新控制方法或者优化控制器,却忽略了隔振参数对控制系统的重要性,盲目地从控制角度优化体系,不仅容易造成控制能源浪费,还可能会引起系统响应发散.
我国《隔振设计规范》[15]仅对单自由度隔振体系的传递率等相关参数做了规定,事实上,本文研究表明,双自由度隔振体系更适用于常见的工程振动控制.本文亦为最优隔振体系设计及最优振动控制设计提供了新思路,对《隔振设计规范》接下来的修订工作具有指导意义.
[1] 魏燕定,赖小波,陈定中,等. 两级振动隔振系统参数优化设计[J].浙江大学学报,2006,40(5):893-896.
WEI Yan-ding, LAI Xiao-bo, CHEN Ding-zhong,etal. Optimal parameters design of two-stage vibration isolation system[J].Journal of Zhejiang University, 2006, 40(5):893-896.(In Chinese)
[2] 宋鹏金,陈龙珠,严细水.锻锤隔振基础参数优化的新方法[J].振动与冲击,2004,23(3):96-98.
SONG Peng-jin, CHEN Long-zhu. YAN Xi-shui. The new parameters optimization method of vibration isolation base of hammer [J]. Journal of Vibration and Shock, 2004, 23(3):96-98. (In Chinese)
[3] 董卡卡,蒲华燕,徐振高,等. 超精密隔振系统的建模与参数辨识[J].武汉理工大学学报,2013,3(1):126-128.
DONG Ka-ka, PU Hua-yan, XU Zhen-gao,etal. Modeling and parameter identification of the ultra-precision vibration isolation system [J]. Journal of Wuhan University of Technology, 2013, 3(1):126-128. (In Chinese)
[4] LIU L K, ZHENG G T. Parameter analysis of PAF for whole-spacecraft vibration isolation [J]. Aerospace Science and Technology, 2007, 11(6): 464-472.
[5] ESMAILZADEH E. Design synthesis of a vehicle suspension system using multi-parameter optimization [J]. Vehicle System Dynamics, 1978, 7(2): 83-96.
[6] ZHANG F, GRIGORIADIS K M, FIALHO I J. Linear parameter-varying control for active vibration isolation systems with stiffness hysteresis [J]. Journal of Vibration and Control, 2009, 15(4): 527-547.
[7] 刘春嵘,肖卫明,徐道临. 双层流体浮筏的隔振特性研究[J].湖南大学学报:自然科学版,2013,40(1):43-48.
LIU Chun-rong, XIAO Wei-ming, XU Dao-lin. Study of the vibration isolation of two-degree-of-freedom fluid-type floating raft [J]. Journal of Hunan University:Natural Sciences, 2013,40(1):43-48. (In Chinese)
[8]KENNEDY J, EBERHART R C. A new optimizer using particle swarm Theory[C]//Proceedings of the Sixth International Symposium on IEEE.Micro Machine and Human Science, 1995: 39-43.
[9]SHI Y, EBERHART R C. A modified particle swarm optimizer [C]//IEEE World Congress on Computational Intelligence.NewYork: IEEE,1998:69- 73.
[10]李军,许丽佳.一种带压缩因子的自适应权重粒子群算法 [J].西南大学学报,2011,33(7): 118-120.
LI Jun, XU Li-jia. Adaptive weight particle swarm optimization algorithm with construction coefficient [J].Journal of Southwest University, 2011, 33(7): 118-120. (In Chinese)
[11]COELLO A C, LECHUGA, MOPSO M S: A proposal for multiple objective particle swarm optimization[C]// Proceedings of the 2002 Congress on IEEE.Evolutionary Computation, 2002, 2: 1051-1056.
[12]欧进萍.结构振动控制——主动、半主动和智能控制[M]. 北京:科学出版社,2003:61-68.
OU Jin-ping. Structure vibration control-active, semi-active and smart control[M].Beijing: Science Press, 2003:61-68. (In Chinese)
[13]DEB K, PRATAP A, AGARWAL S,etal. A fast and elitist multi-objective genetic algorithm: NSGA-II [J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197.
[14]GOLDBERG D E, RICHARDSON J. Genetic algorithms with sharing for multimodal function optimization[C]// Proceedings of the Second International Conference on Genetic Algorithms and Their Applications.Hillsdale, NJ: Lawrence Erlbaum, 1987: 41-49.
[15]GB 50463-2008 隔振设计规范[S].北京:中国计划出版社,2008: 36-40.
GB 50463-2008 Code for design of vibration isolation[S]. Beijing: China Planning Press, 2008: 36-40. (In Chinese)
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
家庭影院技术(2020年6期)2020-07-27
测控技术(2018年10期)2018-11-25
金桥(2018年4期)2018-09-26
浙江工业大学学报(2017年5期)2018-01-22
商场现代化(2016年12期)2016-06-06
西安交通大学学报(社会科学版)(2015年6期)2015-05-20