基于TMS320DM648的多车道车流量检测系统
2014-09-18 07:12胡凯峰吴晓红何小海
电视技术 2014年9期
胡凯峰,吴晓红,杨 毅,何小海
(四川大学电子信息学院图像信息研究所,四川成都 610064)
目前随着交通运输体系的飞速发展,智能交通系统(Intelligent Traffic System,ITS)已发展成为智能交通管理中的主要研究方向[1]。车流量检测作为智能交通系统的重要研究课题之一,在理论研究方面已经取得了众多硕果。目前世界上主要形成了美国、日本、欧盟三大ITS研究基地[2],韩国、新加坡等亚洲国家的ITS研究水平相对较高,随着理论研究的不断成熟,也相继出现了各种视频交通参数检测方面的工业产品。
其中基于视频的车流量检测引起了国内外研究人员的广泛关注,相比于传统的微波检测技术、环形线圈检测技术,它具有处理简单、信息量大、运用广泛等优点[3]。常用的基于视频的车流量检测方法有灰度法、相邻帧差法、边缘检测法、背景差分法。灰度法采用路面和车辆的灰度统计值来检测车辆,但对环境光线的变化十分敏感。相邻帧差法是将相邻两帧相减以检测出运动车辆,但对运行速度过慢的车辆不能有效检测。边缘检测法能够在不同的光线条件下得到车辆的边缘,但在车辆边缘不明显的情况下,该方法可能造成漏检、误检。背景差分法计算当前帧与背景的差值来检测运动车辆,是最常用的车辆检测方法,但需要可靠的背景[4]。
考虑到国内外对智能交通系统的研究,尤其在实际产品应用上的探索,其技术方案越来越成熟,但绝大多数都是在PC机上实现的,随着嵌入式系统的日益发展,如何在嵌入式平台上实现车流量检测已成为非常热门的研究方向。本文设计了基于TMS320DM648嵌入式平台的多车道车流量检测系统。首先采用了基于抽样的背景建模思想在虚拟线圈内进行背景建模,然后采用背景差分获取运动目标,最后在虚拟线圈内对目标进行检测。整个嵌入式系统实现了对车辆实时检测,并且有较高的准确率,具有一定的实用性。
1 系统硬件平台
TMS320DM648嵌入式系统硬件总体架构如图1所示,主要集成了系统存储模块、视频处理模块、数据传输模块。
存储模块包括的存储设备有256 Mbyte的DDR2内存、64 Mbyte 的 NOR Flash、512 kbyte SPI EEPROM。DDR2内存为DSP/BIOS和系统软件的运行空间,最高频率可达533 MHz。NOR Flash用于存储Boot loader和支持系统脱机运行。
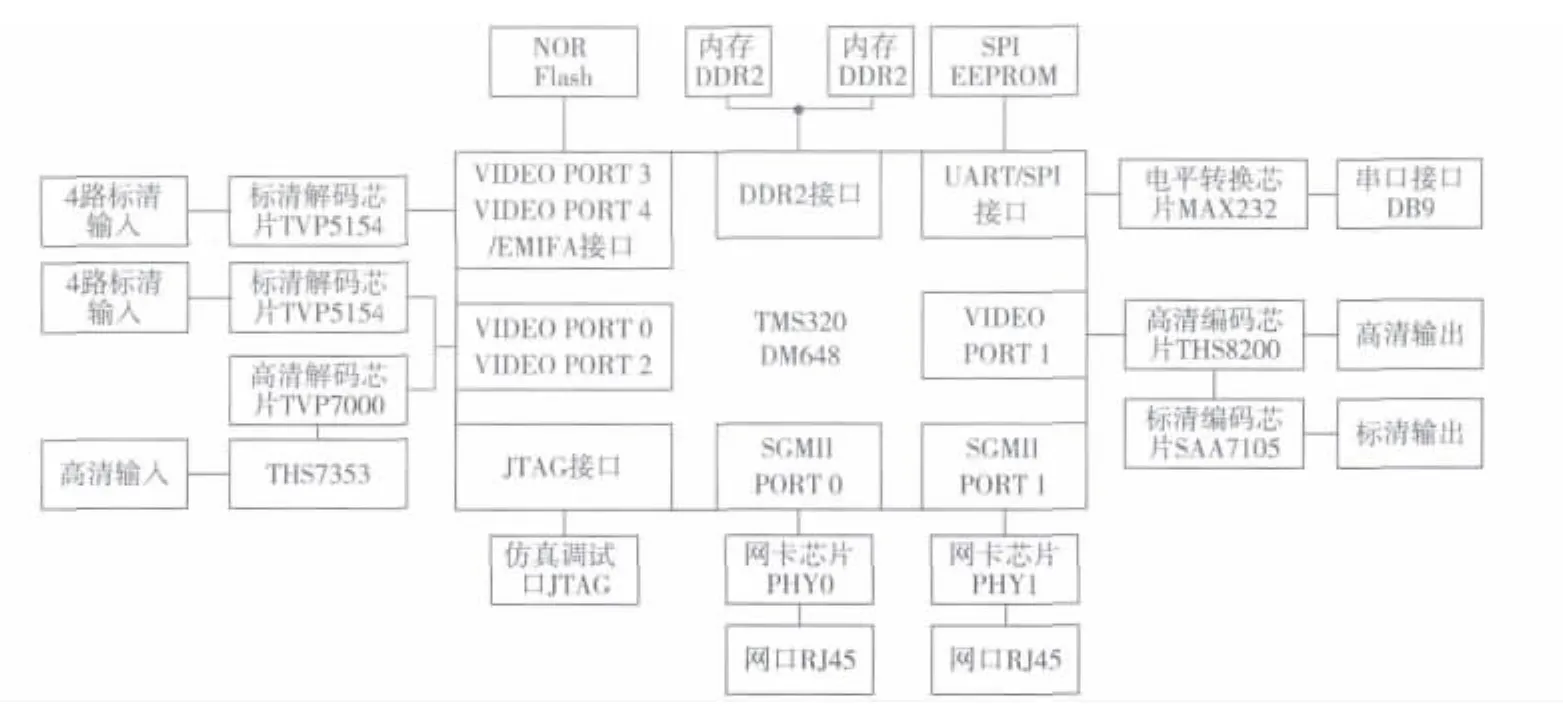
图1 硬件框架图
视频处理模块可以接收8路模拟视频信号,将其通过TVP5154视频解码器解码成YUV格式,随后通过EDMA3的方式传送给 TMS320DM648,经过视频处理后,TMS320DM648通过EDMA3的方式传送给SAA7105视频编码器编码,最后连接显示器显示。另外可以接收1路高清视频信号和输出1路高清视频信号。
数据传输模块包括有2路千兆以太网、1路RS-232串口。
2 车流检测算法的研究
车流检测主要是采用运动目标检测的方法来提取运动车辆,进而实现对智能交通中的车辆进行实时统计。
而常用的运动目标检测的方法有光流法、帧差法、背景差分、块匹配法等[5]。其中光流法和块匹配法算法精度高、目标定位准确度高,但是运算量大,对硬件环境要求比较高,不适合在该嵌入式平台上进行实时的车辆检测。帧差法算法简单,但对于运动速度比较缓慢的车辆检测噪声大、准确度不高。背景差分法算法简单,只需要可靠的背景,就能够提取出准确的目标,比较适合在该嵌入式平台上进行车辆的实时检测。针对以上的分析,本文采用背景差分法来提取运动目标,因而需要使用背景建模来提取可靠的背景。
其中常见的背景建模方法有平均背景建模、中值背景建模、单高斯背景建模、混合高斯背景建模等。平均背景建模、中值背景建模、单高斯背景建模算法简单,但对于环境比较复杂的车流视频,提取的背景噪声比较大,检测准确率低。混合高斯背景建模算法精度高,但是算法的运算量大,背景更新耗时大,不适合在该嵌入式平台上进行实时处理。针对以上的问题,本文设计了基于抽样和高斯分布相结合的背景建模算法。
2.1 基于抽样和高斯分布的背景建模
假设车流视频中的某一像素点(x,y)在时间轴T上的一系列连续样本集合为{x1,x2,…,xn},根据抽样原理采用等时间间隔ΔT对(0,T)时间内的样本进行抽样,其中ΔT根据不同的车流场景而定。
设抽样样本集合为{xm,…,xn},通过式(1)、式(2),求取样本集合的均值um,n和方差σm,n
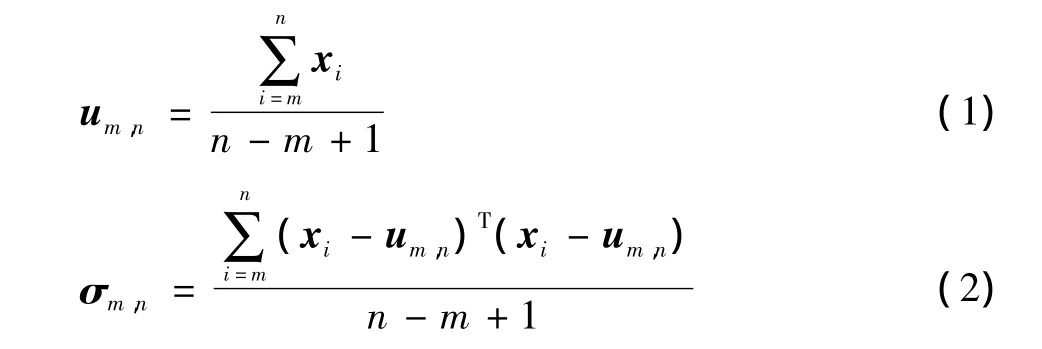
式中:um,n为图像当前点的初始背景值。
由于实际视频图像中存在运动物体,上述抽样样本集合可能同时包含前景和背景,因而需要对样本进行筛除,根据高斯分布的特征,尽可能选择概率大的像素点作为学习样本点,具体的筛除方法如下:
依次选取样本集合{xm,…,xn}中的每一个样本xi,对于满足式(3)的样本点再次采用式(1)、式(2),求取均值和方差

式中:为本次学习样本集合的背景值;T为样本xi与均值um,n之间波动系数。

由于实际视频图像中可能存在一些慢速运动的物体,导致在某次学习样本集合得出的实际为前景样本值,因而需要采用式(4)对新的均值样本集进行筛除,对于满足式(4)的所有均值样本点采用式(1)、式(2),求取最终的均值和方差

式中:为运动图像的最终背景值,而图像中每个像素点的值组建了最终的背景图,M与N为均值样本与均值μ之间的波动系数,k为学习样本集合的个数,0<i<k,0<N<M<3。
2.2 基于背景差分的目标提取
假设t时刻车流视频中点(x,y)处像素值为It(x,y),背景图像值为B(x,y),采用背景差分公式(5),求取当前图像在(x,y)处前景的灰度值Dt(x,y)。然后采用Ostu最大类间方差法[6],求取由Dt(x,y)组成的前景图像最佳分割阈值T。最后采用式(6),求取当前图像在(x,y)处前景的二值图像值Mt(x,y)
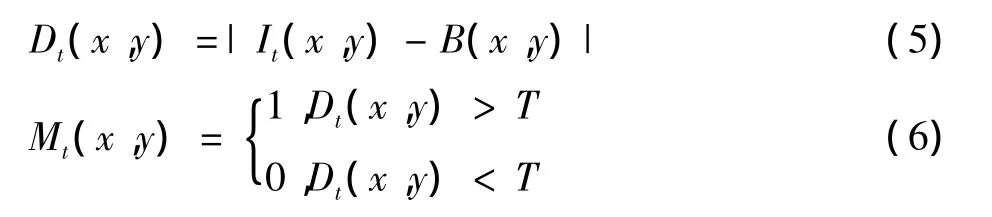
式中:Mt(x,y)为最终提取的二值化前景图像值。
为了消除由背景差分和Ostu分割提取的二值化前景图像带有的噪声,采用了形体学腐蚀操作消除目标图像中的小点噪声,然后采用膨胀操作重建因腐蚀操作而丢失的边缘部分,增强目标识别的准确性。
本文采用该方法测试了一段阴天环境下城市快速路段的车流视频序列图,该视频帧率为25 f/s(帧/秒),并与在混合高斯建模方法下提取的运动目标效果图以及最终的运行时间进行了比较,具体如图2和表1所示。
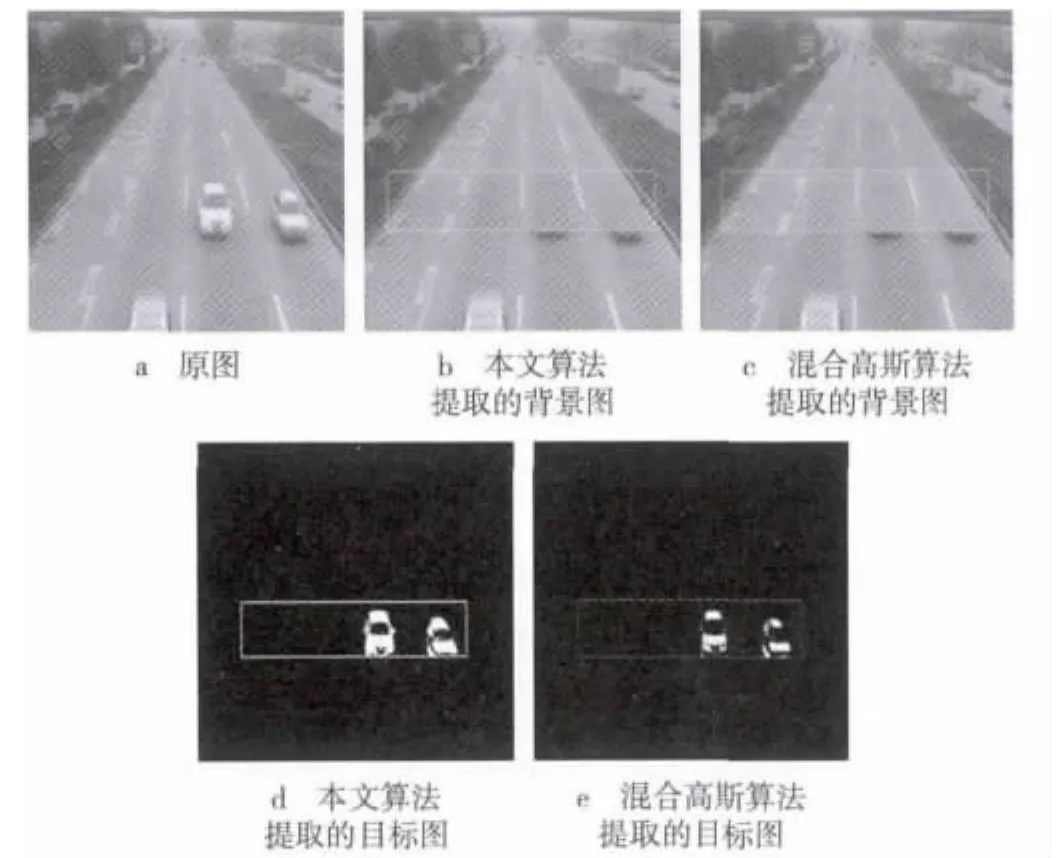
图2 两种不同建模方法提取目标的效果图
从图2和表1可以看出,使用本文提出的建模算法与混合高斯算法在提取目标效果图基本相同的情况下,运行时间上有很大提高。

表1 两种建模方法的运行时间对照表
3 车流量检测的步骤及实验分析
3.1 车流量检测步骤
首先设置虚拟检测线,具体的设置方法如下:
1)在车流视频图像的下方设置两条相互平行、等长且垂直于车道的虚拟检测线,其中每条检测线的宽度为1个像素点。同时必须满足两条虚拟检测线的长度包含整个车道,间距根据具体车流视频图像而定,大于最小车距,小于最短车辆的长度。
2)根据具体车流视频图像上的车道数设置每个检测车道的检测宽度,其中尽量保证每个车道宽度相等,彼此间距相等。
然后进行车流统计,具体统计流程如下:
1)初始化车辆状态标志flag为-1,每个车道车辆数目count为0。
2)采用背景差分提取运动目标。
3)检测车辆,当两条检测线上同时检测有车时,将状态标志flag置为1;当两条检测上同时检测无车时,将状态标志flag置为0,并且将当前车道车辆数目count加1,flag恢复到初始化状态。
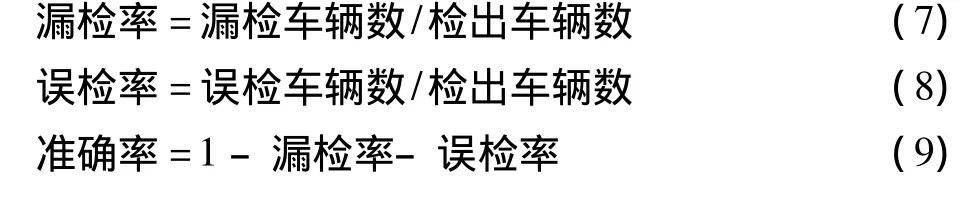
其中有车和无车的判断主要依据目标二值图像中虚拟检测线上白色点的数目确定。假设检测线长度为L,车道数目为N,当检测到检测线上白色点数大于采用式(7)求取的白色点数目门限值T时,则标记该检测线上有车

3.2 多环境下车流检测实验及分析
本文在城市快速路录制了5段不同天气的车流视频,对本文算法和高斯算法进行了车流量检测测试。5段视频的基本信息如表2所示。

表2 5段视频基本信息
5段视频车流量检测界面如图3所示(原图为彩色图片),其中白色矩形为背景建模区域,蓝色矩形为车型检测区域,橘黄色矩形为检测线,红色矩形为检测到的车型。
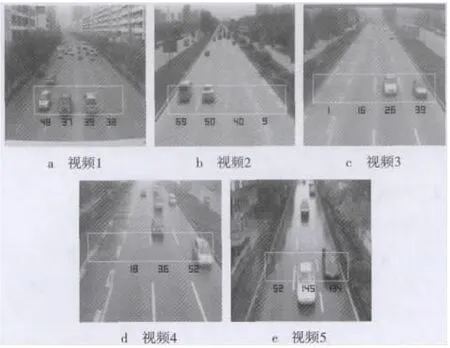
图3 车流量检测界面图
其中车流量检测的准确度衡量标准如下:
5段视频采用本文算法和高斯算法进行车流量检测,结果分别如表3、表4、表5、表6、表7所示。

表3 视频1车流量检测结果

表4 视频2车流量检测结果
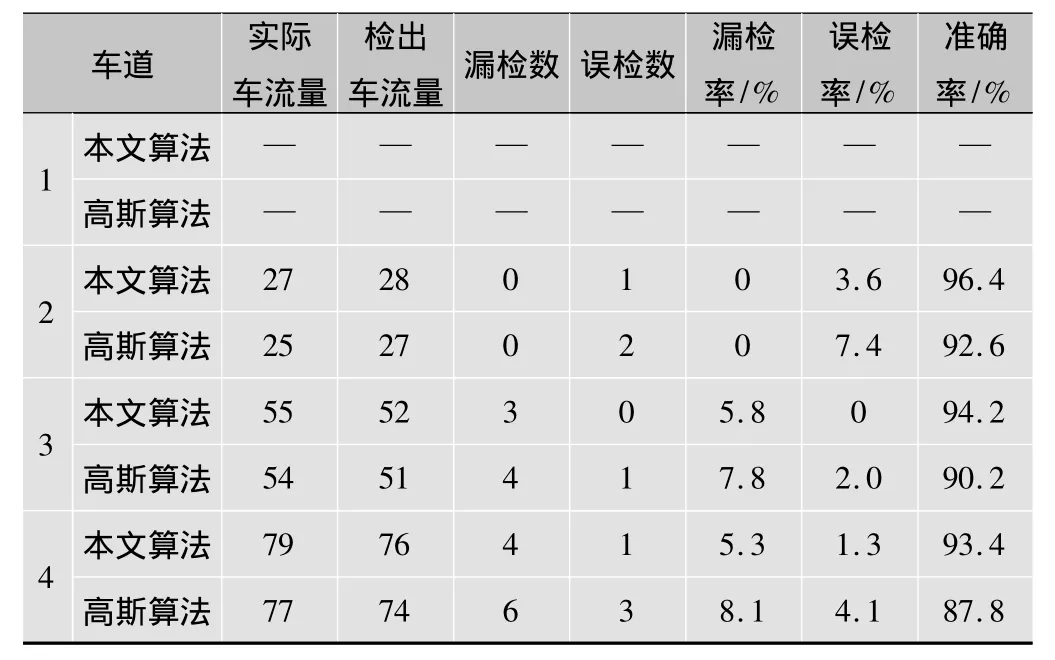
表5 视频3车流量检测结果

表6 视频4车流量检测结果

表7 视频5车流量检测结果
上述表中,“—”表示车辆比较少,不进行统计。从上述表中可以看出,视频1和2场景光线强烈,在阳光的照射下,阴影常导致相邻车辆粘连。采用本文提出的划分车道方法有效防止了车辆粘连产生的误检,提高了检测率,平均准确率达到了94%,而高斯算法平均准确率为92%。视频3场景光线较弱,视频4和5场景阴雨天气,同时伴有风,对目标提取影响较大。采用本文提出的基于虚拟线圈内进行抽样的背景建模方法,较完整地提取出了运动车辆,有效抑制了虚拟线圈外场景变化产生的影响,提高了检测率,阴天下平均准确率达到了94%,雨天下达到了91%,而相同条件下高斯算法阴天平均准确率为92%,雨天下达到了89%。进而表明,基于本文算法设计的TMS320DM648嵌入式平台的多通道车流量检测系统,准确率较高,具有一定的使用价值。
4 总结
针对传统车辆检测系统的局限性,本文设计实现了基于TMS320DM648嵌入式平台的多通道车流量检测系统。首先在虚拟线圈内采用基于抽样的背景建模方法进行背景建模,然后采用背景差分提取运动目标,最后在虚拟线圈内对车辆进行检测。实验表明该DSP嵌入式系统实时检测效果好、速度快,具有一定的使用价值。但也存在因车辆不规范行驶导致车流漏检或误检的情况,因此需要研究改进。
:
[1]史其信,熊辉.展望21世纪智能交通系统(ITS)的发展[J].黑龙江工程学院学报,2001,15(1):52-56.
[2]杜丽丽.智能交通系统中视频车辆检测技术的研究[D].青岛:中国海洋大学,2009.
[3]李宇成,李雷,王目树.多车道的车流量统计[J].自动化仪表,2010,31(10):57-60.
[4]周世付,李建雄,沈振乾,等.基于高斯混合模型的多车道车流量检测算法[J].计算机仿真,2012,29(10):331-335.
[5]田雨露,杨刚,王波,等.基于块的背景重构算法研究及应用[J].液晶与显示,2011,26(5):693-697.
[6]齐丽娜,张博,王战凯.最大类间方差法在图像处理中的应用[J].无线电工程,2006,7(36):25-26.
猜你喜欢
工会博览(2022年33期)2023-01-12
汽车工程师(2021年12期)2022-01-17
当代陕西(2020年14期)2021-01-08
扬子江(2019年3期)2019-05-24
贵州师范学院学报(2016年4期)2016-12-01
浙江大学学报(工学版)(2016年9期)2016-06-05
数学教学通讯·初中版(2015年5期)2015-06-17
中国交通信息化(2014年6期)2014-06-05
电视技术(2014年19期)2014-03-11