一种基于聚束式SAR图像的单脉冲测角方法∗
2014-09-16 09:30宫兰晖李凉海张振华
遥测遥控 2014年4期
宫兰晖, 李凉海, 张振华
(北京遥测技术研究所 北京 100076)
一种基于聚束式SAR图像的单脉冲测角方法∗
宫兰晖, 李凉海, 张振华
(北京遥测技术研究所 北京 100076)
传统单脉冲雷达把舰船目标当作点目标处理,海面杂波对其影响较大,它对小目标无法进行有效监测,限制了该项技术的应用范围。提出一种基于聚束式SAR图像的单脉冲测角方法,解决了雷达对小目标能量重心的精确测角问题。首先对目标进行多通道高分辨成像,然后通过对雷达图像进行单脉冲测角估算出目标上散射点相对于雷达天线波束中心轴的角度偏差,最后对目标上较强散射点的单脉冲测角值进行加权相加,从而估计出目标能量重心处的角度值。仿真结果验证了方法的有效性。
聚束式SAR图像; 单脉冲测角; 目标能量重心
引 言
随着陆地资源不断减少,世界各国都把目光投向海洋,开发海洋资源,发展海洋经济。我国海洋辽阔,海洋资源丰富,国外非法考察船经常进入我国海洋专属经济区进行考察,严重损害我国利益。因此,对海面舰船目标进行大范围搜索、识别和精确定位是目前海洋管理部门的一项重要任务。传统的光学技术受到天时和天候的影响,应用范围有所限制;单脉冲跟踪雷达不具备目标成像能力,只能把目标当作一个点目标进行定位,并且易被干扰,在实际使用中性能指标将大大降低。而基于高分辨雷达图像的目标搜索、识别、定位技术首先对目标区域进行大范围成像,发现目标后基于高分辨图像对目标的关键部位进行识别,进而可对关键部位所在像素进行精确定位。该技术不但具有全天候、全天时的特点,而且具有较强的抗干扰能力,可大大提高雷达对目标的侦察能力,其应用前景广阔。
本文针对基于雷达图像的测角方法进行研究,提出一种基于聚束式SAR图像的单脉冲测角方法,首先利用多通道雷达图像对目标散射点进行单脉冲测角,然后对较强散射点的单脉冲测角值进行加权相加,从而估计出目标能量重心处的角度值。该方法能增加系统的信杂噪比,具有较强的抗海杂波能力、抗干扰能力和抗单脉冲角闪烁能力,可实现对海面慢速运动目标的精确测角和跟踪。
1 基于聚束式SAR图像的单脉冲测角原理
首先介绍基于聚束式SAR图像的单脉冲测角原理,分析雷达测角位置与成像位置的关系。
假设成像场景如图1所示。图中,点P为位于(xP,yP)处的某一散射点,且假设在合成孔径时间内其RCS幅值为常数σP(在高分辨雷达图像的前提下可不考虑RCS相位的影响),雷达沿x轴方向做匀速直线运动,其速度为v,点P到雷达航线的垂直斜距为R0,S为合成孔径的起始点,E为合成孔径的终点,SS′和EE′为天线中心轴,S′(E′)为成像场景中心点,其到雷达航线的最短距离为RC,α为成像过程中天线中心轴视线的转角,雷达高度为H,Δθ为和差波束的方位向波束宽度。雷达发射线性调频信号,经和通道天线方向图调制后,有



其中,uΣ、uΔθ、uΔφ分别为和通道、方位差通道以及俯仰差通道的回波数据压缩值,累加变量i表示合成孔径上的采样点。当SAR工作在聚束模式时,由图1所示的成像几何关系作出点P及点S′(E′)的斜平面几何关系图,如图2所示。
图2 中,Ai(i=1,2,…,M)为雷达位置,M为方位向采样点数,AiPi(P′i)为AiP在点S′(E′)的斜平面上的投影。在AiS′(E′) ≫S′(E′)Pi(P′i) 的情况下,可认为θP(τi)、φP(τi) 不变,即θP(τi) ≈θ0,φP(τi) ≈φ0。以正侧视聚束式SAR为例,为分析简便起见,假设图2(a)中点P位于直线l1上,图2(b)中点P位于直线 l2上,当雷达高度 H=5km,S′(E′)P=50m,α =4°时,在测角精度为0.1mrad的情况下,有 θmax=θmin,φmax= φmin,θmin和 θmax分别为 θP(τi) 的最小值和最大值,φmin和 φmax分别为 φP(τi) 的最小值和最大值。也就是说,对于聚束式SAR而言,方位向高分辨等效于散射点相对于波束中心轴等角偏差信号的积累,这使得用回波压缩信号进行单脉冲测角成为可能;而对于SAR的其它工作模式,如条带模式或扫描模式,在回波数据录取过程中,天线波束扫过散射点,而差波束的天线方向图函数关于等信号轴方向奇对称,因此差通道信号在进行方位向积累时(如式(3)所示),由于差波束天线方向图的影响导致积累值为零,这时差通道的成像结果是无意义的,不能将其用作测角的工具。

图2 点P及点S′(E′)的斜平面几何关系图
由振幅和差单脉冲测角原理[8~10]可知,点P相对于雷达天线中心轴的方位面角度偏差^θP和俯仰面角度偏差分别为

其中, μθ=F′θ(θ3dB/2,φ3dB/2)/F(θ3dB/2,φ3dB/2)、μφ=F′φ(θ3dB/2,φ3dB/2)/F(θ3dB/2,φ3dB/2) 分别为方位面和俯仰面的测角比例系数,F为单个天线方向图函数,F′θ、F′φ分别为单个方向图函数F对θ和φ的偏导数,θ3dB、φ3dB分别为单个天线波束在方位面和俯仰面的半功率波束宽度,Re[·]表示取实部操作。由上述分析,将 θP(τi) ≈ θ0、φP(τi) ≈ φ0代入式(4),得

可见,在二维高分辨的前提下,用三通道聚束式SAR图像对散射点进行角度估算得到的方位面角度偏差^θP以及俯仰面角度偏差与方位向脉冲积累个数M无关,最终可退化为单脉冲角偏差估算式。但式(5)是在假设BP算法可以完全校正距离徙动以及解距离方位耦合的基础上得到的,而在实际中,由于采样不可能得到上述理想表达式,因此随着方位向脉冲积累个数M的增加,图像信噪比增大,测角精度也会有所改善。由图2以及关系式θP(τi)≈θ0、φP(τi)≈φ0可知,式(5)的估算值与雷达在合成孔径的具体位置无关,可以作为散射点在雷达成像时刻的实时角偏差。
2 基于能量重心的雷达图像测角方法
在高分辨雷达图像中,整个舰船的灰度分布不均匀,亮度比较高的点是舰船的上层建筑,如舰桥、桅杆等的角反射或点反射的结果,亮度稍低的点是由甲板等漫反射引起的结果[11]。由于可以将不同的散射点分辨开,当雷达相对于目标的位置有小角度变化时,各散射点回波不会因为作向量相加而导致幅度变化,考虑到弱散射点容易被强散射点、杂波以及干扰污染,因此在本方法中,由强散射点得到目标的能量重心,并对其进行测角跟踪,从而提高雷达的抗角闪烁能力和抗干扰能力。
若目标上强弱散射点的分布较均匀,则不需要对目标图像进行分割。目标能量重心的角度值提取可分两步进行:首先选出能量较强的散射点,然后对这些较强散射点的角度偏差进行加权相加,得到能量重心的角度信息。
2.1 散射强度阈值及其对应的图像灰度阈值的设定
为了估算出目标能量重心的角度,首先要确定目标上能量相对较强的散射点的角度信息,即通过确定散射强度阈值及其对应的图像灰度阈值来排除能量较弱散射点的干扰。下面讨论阈值的设定方法。
仍然假设在成像过程中散射点的RCS幅值不变,由第1节的讨论可知,在理想情况下,位于(x,y)处的散射点的回波在和通道中的数据压缩值为






式(9)表示和通道雷达图像中目标的不同像素点对应着不同的灰度阈值,且此灰度阈值由散射强度阈值以及和波束方向图共同决定。在和通道雷达图像中,像素灰度值大于灰度阈值的像素点被选出,其角度偏差将用来确定目标能量重心的角度偏差。另外,为了增加此方法的抗角闪烁能力和可靠性,图像灰度值达到饱和的像素点也要被剔除。
2.2 目标能量重心角度值的确定



结合式(10)和式(11),可以取



3 仿真结果及分析
为了分析基于聚束式SAR图像的单脉冲测角性能,在此进行仿真分析。假设聚束式SAR正侧视工作,其发射线性调频信号,脉冲持续时间Tr=5μs,脉冲重复频率为600Hz,载频为2.1486GHz,信号带宽为150MHz,单个天线方向图为简化的高斯型方向图,方位面和俯仰面主瓣3dB波束宽度均为1°,回波录取过程中天线波束中心在地面的足迹坐标为(0,5km),成像积累角α=4°,对舰船目标上的散射点建模,其示意图如图3(a)所示,船舷和中间桅杆上散射点的散射强度为255,两端桅杆上散射点的散射强度为100。图3(b)、(c)和(d)为目标在和差三通道中的聚束式SAR图像,图4为和通道图像灰度值(归一化),图5为散射强度阈值
时由式(9)得到的图像灰度阈值(用和通道图像最大灰度值对其归一化)。

图3 目标示意图及其在和差三通道中的雷达图像

图4 和通道图像灰度值(归一化)
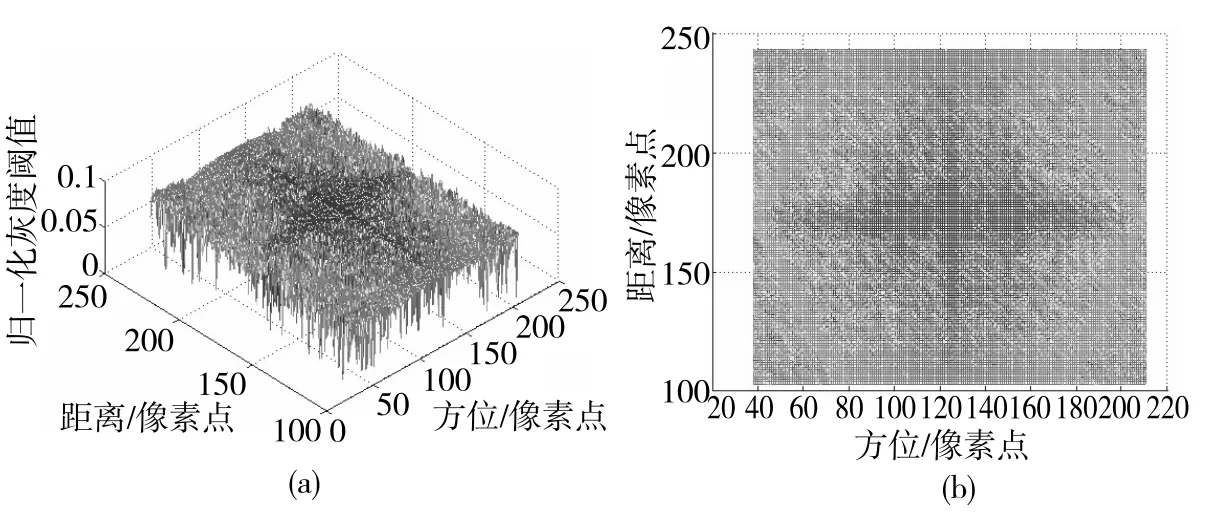
图5 散射强度阈值时对应的灰度阈值

表1 用不同散射强度阈值σVT估算出的能量重心的角度偏差
4 结束语
本文提出一种基于聚束式SAR图像的单脉冲测角方法,即通过对多通道聚束式SAR图像进行单脉冲测角得到目标散射点相对于雷达天线中心轴的角度,再对目标上较强散射点的单脉冲测角值进行加权相加,估计出目标能量重心的角度值。仿真结果表明,该方法能有效提取目标能量重心的角度值。由于使用了高分辨雷达图像,该方法可增加系统的信杂噪比,提高跟踪测量雷达的抗海杂波能力、抗干扰能力以及抗单脉冲角闪烁能力,具有广阔的应用前景。但本文方法及仿真尚未考虑通道不一致、通道噪声和图像噪声的影响,亦还没有得到实测数据的验证,仍需进一步完善。
[1] 张澄波.综合孔径雷达原理、系统分析与应用[M].北京:科学出版社,1989.
[2] 王 娟.机动条件下的高分辨率机载聚束SAR算法研究[D].南京:南京航空航天大学,2011.
[3] McCorkle J W.Focusing of Synthetic Aperture Ultra Wideband Data[C].IEEE International Conference on Systems Engineering,Fairborn,OH,USA,1991:1~5.
[4] Tan Weixian, Li Daojing, Hong Wen.Airborne Spotlight SAR Imaging with Super High Resolution Based on Back-Projection and Autofocus Algorithm[J].IEEE International Geoscience and Remote Sensing Symposium,2008.
[5] Desai M D and Jenkins W K.Convolution Back-Projection Image Reconstruction for Spotlight Mode Synthetic Aperture Radar[J].IEEE Transaction on Image Processing,1992,1(4):505~516.
[6] 朱国富,董 臻,梁甸农.超宽带LFM信号的BP算法[J].信号处理,2001,17(5):424~428.
[7] 林翊青,李景文.超宽带/宽波束SAR的后向投影(BP)算法[J].遥测遥控,2005,26(3):24~30.
[8] 王德纯,丁家会,程望东.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
[9] 胡体玲,李兴国.双平面振幅和差式单脉冲雷达的性能分析[J].现代雷达,2006,28(8):11~13.
[10] 安 红,杨 莉,宋悦刚.单脉冲雷达导引头角度跟踪环路建模及抗干扰仿真分析[J].中国电子科学研究院学报,2012,7(1):52 ~57.
[11] 董江曼,李应岐,邓 飚.SAR图像舰船目标的特征识别[J].陕西师范大学学报(自然科学版),2004,32(6):203~205.
A Method of Monopulse Angle Measurement Based on Spotlight SAR Images
Gong Lanhui, Li Lianghai, Zhang Zhenhua
Ship targets are considered as point targets in a traditional monopulse radar.However,the powerful sea clutter makes the monitoring for small targets invalid and limits the application of the monopulse radar technology.Thus,a method of monopulse angle measurement based on spotlight SAR images is proposed,which can measure the angle deviation between small target's energy center of gravity and the radar antenna beam's center axis accurately.Firstly,the target is imaged with high resolution in multichannel.Then, the multichannel radar images are used in monopulse angle measurement, to estimate the angle deviations between the scattering points of the target and the radar antenna beam's center axis.Finally,the angle deviations between the more powerful scattering points and the radar antenna beam's center axis are weighted by a vector,therefore the angle deviation between the target's energy center of gravity and the radar antenna beam's center axis is obtained.The simulation result demonstrates the effectiveness of the method.
Spotlight SAR images; Monopulse angle measurement; Target's energy center of gravity
TN953
A
CN11-1780(2014)04-0032-07
∗项目资助:十二五总装精导组装备预先研究项目(No.51301020201)
2014-03-27 收修改稿日期:2014-04-21
宫兰晖 1988年生,硕士,主要研究方向为雷达信号处理。
李凉海 1965年生,研究员,主要研究方向为雷达系统设计。
张振华 1977年生,博士,高级工程师,主要研究方向为SAR成像。
猜你喜欢
天文学报(2022年6期)2022-12-12
幼儿园(2021年12期)2021-11-06
北京航空航天大学学报(2020年3期)2021-01-14
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
制导与引信(2016年3期)2016-03-20
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
雷达学报(2014年4期)2014-04-23