鸭式旋转机翼飞机过渡段旋翼卸载特性分析
2014-09-15 07:49史振兴高正红
飞行力学 2014年4期
史振兴, 高正红
(西北工业大学 翼型叶栅空气动力学国家重点实验室, 陕西 西安 710072)
0 引言
旋转机翼飞机是一种兼具直升机垂直起降与固定翼飞机高速巡航特征的新概念航空飞行器。它包括三种飞行模式[1]:旋翼飞行模式、固定翼飞行模式以及两种模式之间相互转换的过渡飞行模式。旋转机翼飞机最大的特征就是拥有一副既可以高速旋转作为旋翼,又可以锁定作为固定翼的主机翼。当飞机以旋翼模式飞行时,旋转机翼高速旋转作为旋翼使得飞机能够像普通直升机一样垂直起降和低速飞行;当旋转机翼锁定作为固定翼时,飞机以固定翼模式飞行,彻底消除了旋翼旋转引起的气流不对称对直升机飞行速度的限制,从而使得飞机能够以更高的速度实现高效巡航飞行。
旋转机翼飞机的布局有多种形式,其中以鸭式三翼面布局最为常见。鸭式旋转机翼飞机的气动布局特点是具有较大尺寸的鸭翼和水平尾翼。在旋翼飞行模式下,旋翼为主要的升力面;在固定翼巡航状态下,鸭翼、尾翼与旋转锁定后的主机翼组成三翼面布局,共同提供升力;在过渡飞行阶段,由主旋翼和鸭翼、尾翼共同承担升力。为了确保过渡飞行安全、顺利的进行,要求主旋翼和机翼气动力的合理匹配来克服飞机飞行过程中的重力与阻力。
本文通过对鸭式旋转机翼飞机过渡飞行模式的特性分析,定义出了飞机转换过程中的低速边界和高速边界。飞机只有在两条边界之间进行转换飞行才是安全可行的。同时提出了一种以旋翼总距和前飞速度为控制量组成转换边界的分析方法,并以实验室某40 kg级飞机为样机,对该方法进行了验证。
1 过渡飞行模式
鸭式旋转机翼飞机的过渡飞行模式包括两种不同的过程:一种是从旋翼飞行模式转换到固定翼模式的旋翼卸载模态,另一种是从固定翼模式转换到旋翼飞行模式的旋翼加载过程。本文只针对旋翼卸载模态进行分析。
鸭式旋转机翼飞机以旋翼模式飞行时,可实现垂直起飞、悬停与低速前飞。当以旋翼模式进行小速度前飞时,旋翼既需要提供平衡重量所需的拉力又需要提供前飞需用的动力。当前飞速度达到一定值时,操纵桨盘使飞机的机身迎角变为0°,此时飞机旋转机翼桨盘在水平面内。与此同时,发动机开始给前拉螺旋桨输出动力,飞机进入旋翼卸载模态。
在飞机进入旋翼卸载过渡模式时,旋翼需要不断地卸载,前拉螺旋桨需要不断地加载以完成飞机从旋翼模式过渡到固定翼模式。在过渡过程中,为了降低旋翼的气动干扰,要求飞机的机身保持小迎角姿态(可假设迎角保持为0°),同时旋翼在一定转速条件下,通过降低旋翼的总距使其卸载。当飞机旋翼卸载到零时,旋翼系统对于飞机本体而言几乎不提供拉力,再降低旋翼转速直至将旋翼完全锁定为固定翼,此时旋翼完成了卸载与飞行模式的转换。
2 转换边界
在旋翼卸载过程中,前拉发动机的拉力用来克服飞行阻力,使飞机加速。要使飞机能够平稳地进行转换,飞行员必须要清楚飞机在某一旋翼功率下的转换速度范围。转换速度过低,飞机鸭翼、尾翼和旋翼共同产生的升力不足以克服重力;转换速度太高,飞机又受到发动机可用输出功率的限制[2]。在旋翼卸载过程中转速保持不变,旋翼功率的多少直接反映在旋翼总距的大小上。因此要想实现水平过渡飞行,就必须清楚旋翼总距随前飞速度的变化规律。这就形成了以前飞速度和旋翼总距为控制参数的一个转换边界。本文旨在从最低转换速度到最高转换速度这两个方面入手,研究飞机旋翼卸载过渡过程。为了使研究方便简单,认为飞机在过渡转换过程中的某一状态时的加速度比较小,近似为零,飞机处于稳定飞行状态。
2.1 最低速度转换边界
鸭式旋转机翼飞机上各个部件所受的外力图如图1所示。假设发动机推力与机身升阻力都通过重心。根据图1可得如下纵向力平衡关系[3]:
Tcosαf-Hsinαf+Lc+Lf+Lh=G+Gf
-Tsinαf+Tl=Dc+Df+Dh+Hcosαf
Lcxc+(Tsinαf+Hcosαf)zr-(Tcosαf-
Hsinαf)xr+Dhzh-Lhxh-Dczc=0
式中,Lc,Dc,Lh,Dh,Lf及Df分别为鸭翼、尾翼、机身的升力和阻力;xc,zc,xr,zr,xh及zh分别为鸭翼、旋翼、平尾气动力焦点到重心的水平距离和垂直距离;Gf为过渡模式下旋翼旋转对机身的垂直增重;Tl为前拉发动机拉力。

图1 作用在飞机上的外力Fig.1 Forces on aircraft
旋转机翼飞机在过渡过程中,飞机的重量由旋翼和飞机固定翼升力面共同承担。将鸭翼、尾翼升力表达式代入上式可得:
(1/2)ρv2(ScCyc+ShCyh)=G+Gf-Lf-Tsinαf
当旋翼总距固定在某一确定值时,要想转换速度达到最小,由上式可知,ScCyc+ShCyh必须达到最大。因此本文首先利用旋转机翼飞机旋翼飞行模式确定过渡过程中旋翼总距的变化范围,在这个变化范围内取某一总距定值,在过渡段分别取鸭翼迎角为可用最大迎角或尾翼迎角为可用最大迎角,通过力矩平衡方程求得各部件气动力来寻求ScCyc+ShCyh的最大值,从而求得转换速度的最小值。该最小转换速度与当前的总距值可构成低速边界中的一点。当选取的总距值在可变化的范围内移动时,就得到了一条独特的最低转换速度边界。
过渡转换过程飞机总距-速度的最低转换速度边界计算流程如图2所示。

图2 最低转换速度边界计算流程Fig.2 Calculation process of the lowest conversion speed boundary
2.2 最高速度转换边界
在卸载过程中,飞机的最高转换速度受到多方面的限制,如旋翼系统中前行桨叶的压缩性、后行桨叶的失速效应以及整个飞机发动机可用功率的限制。最值得注意的是飞机发动机的可用功率,它是制约飞机最大转换速度最重要的因素。本文通过分析飞机在过渡过程中所需的功率与发动机所能提供的最大功率进行比较,从而确定飞机的高速边界。
旋转机翼在前飞过程消耗的总功率PT由三部分组成,分别为型阻功率Pkd、诱导功率Pki及其他功率Pkt。利用前飞滑流理论与前飞叶素理论相结合的方法可求得旋转机翼前飞时桨盘的诱导速度,从而求得需用功率。
根据前飞滑流理论[4-5]可知:


根据前飞叶素理论,诱导速度取到一阶谐波,即:
v1=v0+v1ccosψ+v1ssinψ
将两种理论得到的公式相结合,首先设定一个v0的初始值,由叶素理论求出一个拉力系数CT值,再由这个值通过滑流理论求出v1,将其作为叶素理论的常值v0,如此循环迭代求解出最终的拉力系数和平均诱导速度值。
型阻功率:
Pkd=σCD0.7KP/4
KP=(1+5μ2)KP0
式中,KP0为悬停状态型阻功率修正系数,其与桨叶根梢比有以下近似关系[4]:
诱导功率:
式中,J0为悬停状态的诱导功率修正系数[4]。
其他功率:
Pkt=CT(-λ0)-CHμ
旋转机翼总功率:
PT=Pkd+Pki+Pkt
飞机阻力:
D=Dc+Dh+Df+Dt
式中,Dc,Dh及Df分别为鸭翼、尾翼及机身的阻力;Dt为旋翼后向力。
则前拉螺旋桨需用功率:
在伟晶作用发育的全过程中,不是所有伟晶岩区的伟晶岩脉中都可以见到伟晶岩各结构带,只在一些典型的脉中能够见到。特别是构造活动频繁、围岩渗透性较强的地区形成的伟晶岩,往往不具有良好的带状构造,各种矿物组合在脉中分布无明显的规律[9]。
PL=DV0
发动机所需的总功率系数:
P=PT/ηT+PL/ηL
式中,ηT,ηL分别为发动机到旋翼系统和前拉螺旋桨系统的传递损失系数。
在旋翼卸载过程中,随着前飞速度的不断增大,飞机需用功率逐渐增大。旋转机翼飞机过渡段高速边界在满足力与力矩平衡的前提下还应确保飞机的需用功率P不能大于发动机的额定输出功率Pe,即:
P≤Pe
过渡转换过程飞机总距-速度的最高转换速度边界计算流程如图3所示。

图3 最高转换速度边界计算流程Fig.3 Calculation process of the highest conversion speed boundary
最高转换速度边界前半部分的计算流程如同最低转换速度边界,在确定总距的变化范围后,通过平衡方程计算在某一特定总距下,随着前飞速度的不断增加,飞机在过渡过程中需用功率的变化范围,再与发动机的额定功率进行比较,得出能达到的最大速度,最终得出过渡段的最高转换速度边界。
3 算例分析
为了验证上述方法的有效性,本文采用自行研制的某40 kg级旋转机翼飞行原理试验验证机为样机,计算过渡模式下旋翼总距随速度变化的转换边界。该飞机采用三翼面布局,鸭翼、尾翼采用优化后的低雷诺数翼型,旋翼为两片刚性桨叶,翼型采用14%厚度的椭圆翼型。该飞机有旋翼系统和前拉系统两套动力输出装置,由一台中央发动机通过一套离合机构实现对两套动力装置的功率输出与分配。该飞机的主要参数与传动系数为:飞机的质量为40 kg,总距的变化范围为0°~9°,旋翼转速为1 800 r/min,旋翼直径为1.7 m,旋翼面积为0.29 m2,鸭翼面积为0.25 m2,尾翼面积为0.26 m2,发动机额定功率为8 kW,旋翼传动损失系数为0.77,前拉螺旋桨损失系数为0.8。
该样机采用全动的鸭翼和尾翼,飞机悬停时旋翼总距为9°。鸭翼和尾翼的气动力数据以及旋翼翼型的气动力数据都是由风洞实验得到的。
图4给出了旋转机翼飞机低速段旋翼总距与速度的最低转换速度边界。由图4可以看出,飞机开始转换时的最小速度不低于7.2 m/s,转换结束后飞机的最小飞行速度为30.6 m/s。

图4 低速段转换边界Fig.4 The lowest conversion speed boundary
图5给出了在转换过程中旋翼产生的拉力和鸭翼、尾翼产生的升力随速度的变化曲线。由试验结果可以发现,在整个转换过程中,飞机升力的主要承担者逐渐从旋翼系统转化到鸭翼和尾翼上,这也是过渡转换的最终目的。

图5 低速段旋翼和鸭翼、尾翼的升力变化Fig.5 Changes of lift on rotor, canard and horizon tail in the lowest conversion speed boundary
图6列举了总距分别为1°,3°,5°,7°的情况下,飞机的需用功率随前飞速度的变化规律。由图可知,飞机的需用功率随前飞速度的增加而增大。将其与飞机额定功率Pe进行比较,通过飞机额定功率的限制来确定飞机的最高转换速度边界。
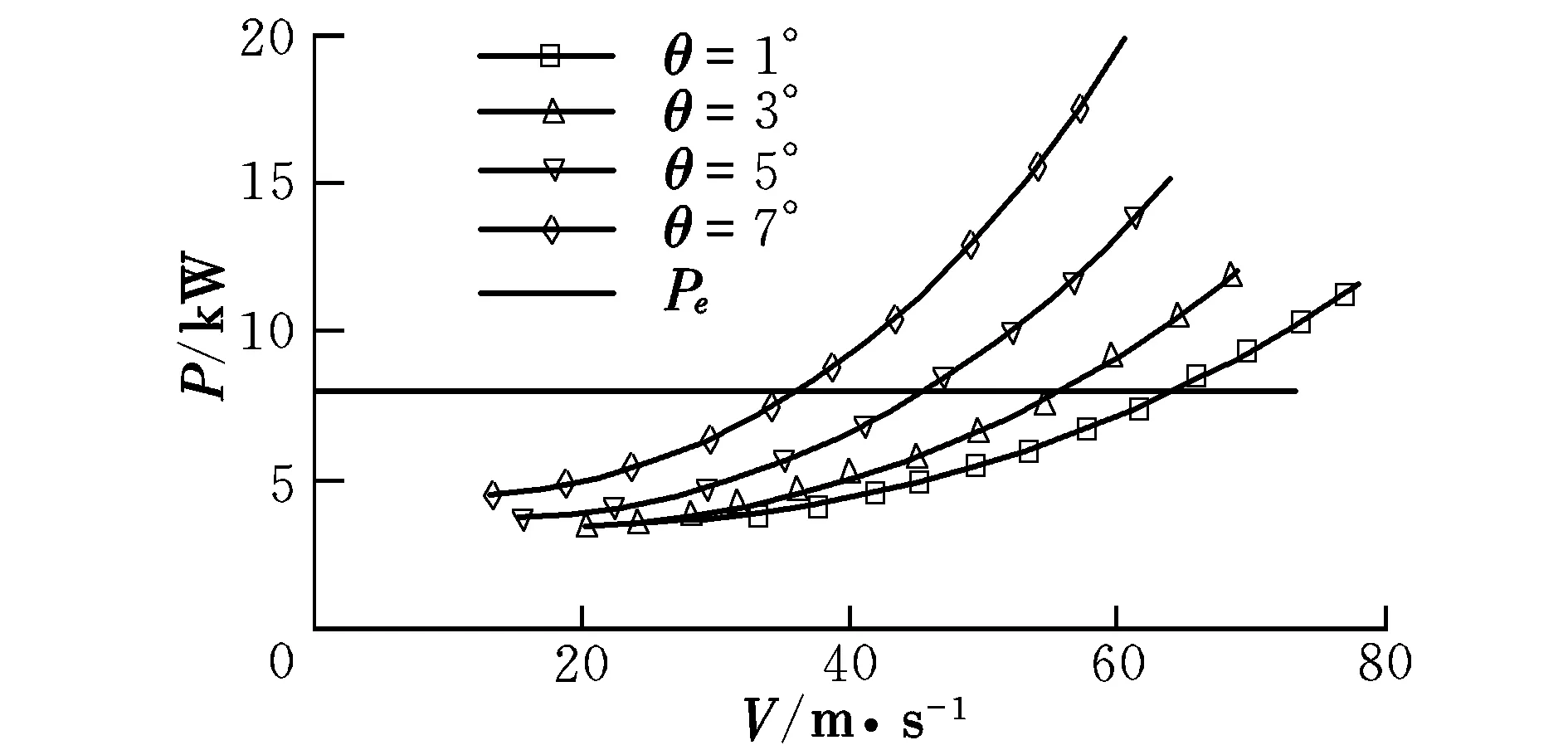
图6 不同总距下飞机的需用功率Fig.6 Power of aircraft required by different collective pitches
图7给出了飞机转换过程的最高转换速度边界。由图可见,飞机转换后的最大飞行速度为65 m/s。

图7 高速段转换边界Fig.7 The highest conversion speed boundary
最后将低速边界与高速边界结合起来,同时考虑总距的变换范围,确定出了旋转机翼飞机在整个过渡过程中的转换边界,如图8所示。飞机只有在该边界范围内进行过渡转换才能保持水平飞行。

图8 过渡段转换边界Fig.8 Transition boundary
4 结束语
鸭式旋转机翼飞机作为一种可垂直起降的高速飞行器,具有良好的应用前景。其过渡飞行模式无疑成为首先要研究攻克的难点。飞机在过渡过程中必须保持飞机纵向的力与力矩平衡。通过分析可知,机翼可用最大升力系数是飞机最低转换速度的限制因素,发动机功率为飞机高速段的限制因素。并以此提出了一种有效的分析方法,确定出了旋翼总距随速度的变化曲线,最终得到飞机在旋翼卸载过渡过程的转换边界,为后续该种飞机转换速度的指标制定与转换操纵提供了理论依据。此外,本文只是在定总距的前提下对飞机过渡飞行模式进行稳态分析,下一步工作还将研究在卸载过程中总距降低的快慢对飞机过渡的影响。
参考文献:
[1] 邓阳平.新概念旋转机翼飞机旋翼技术研究[D].西安:西北工业大学,2006.
[2] 曹芸芸,陈仁良.倾转旋翼飞行器发动机短舱倾转角度-速度包线分析[J].航空动力学报,2011,26(10):2174-2180.
[3] 梁琨,邓阳平,高正红.旋转机翼飞机旋翼飞行动力学模型及配平[J].飞行力学,2011,29(5):5-8.
[4] 约翰逊W.直升机理论[M].北京:航空工业出版社,1991:35-45.
[5] 王适存.直升机空气动力学[M].南京:航空专业教材编写组,1985:24-46.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
湖北工业职业技术学院学报(2021年1期)2021-04-01
军民两用技术与产品(2021年9期)2021-03-09
北京航空航天大学学报(2020年10期)2020-11-14
名车志(2020年10期)2020-10-27
民用飞机设计与研究(2020年1期)2020-05-21
电子制作(2019年9期)2019-05-30
产品可靠性报告(2017年6期)2017-09-05
北京航空航天大学学报(2016年8期)2016-11-16
航空学报(2015年4期)2015-05-07