同种异体骨切割设备夹持装置的设计
2014-09-14 03:27:20方新果赵改平王晨曦柏磊磊
生物医学工程学进展 2014年2期
方新果,萨 拉,赵改平,王晨曦,柏磊磊
上海理工大学 医疗器械与食品学院(上海,200093)
同种异体骨切割设备夹持装置的设计
方新果,萨 拉,赵改平,王晨曦,柏磊磊
上海理工大学 医疗器械与食品学院(上海,200093)
根据对骨植入材料的力学分析,从仿生学原理入手,建立六自由度的手夹持结构的力学模型,设计了骨切割设备夹持手机械结构。它能适应不规则形状骨材料的加工,满足临床对不同规格产品的需求,可提高操作的安全性、骨料的利用率。
骨植入材料;骨切割;机械手;夹持结构
0 引言
用于临床的骨植入材料(bone implant)[1]目前主要为自体骨材料、同种异体骨材料、异种骨材料与人工骨材料等。而自体骨植入材料的选取会增加患者的再度创伤,取骨区域有限且存在并发症。 异体骨移植材料主要用于修复、填充骨缺损,起到固定和支撑作用,其力学特性取决于供骨的结构和部位,皮质骨的刚度和强度均明显大于松质骨[2]。根据1992年Czitrom[3]提出的骨移植原则,需要对现有的同种异体骨进行切割。移植骨的生物学特性有:骨传导性、骨诱导性以及成骨作用[4]。
目前在机械加工过程中,切割常用方式有手工切割、半自动切割机切割及数控切割机切割。手工切割灵活方便,但手工切割质量差、尺寸误差大、材料浪费大、后续加工工作量大,同时劳动条件恶劣,生产效率低,而且是开放式的,易污染,达不到洁净度的要求,采用加装防护隔离设备的措施,才能满足安全性及医疗器械生产质量管理规范的要求。半自动切割机中仿形切割机,切割工件的质量较好,由于其使用切割模具,不适合于单件、小批量和大工件切割。其它类型半自动切割机虽然降低了工人劳动强度,但其功能简单,只适合一些较规则形状的零件切割。数控切割相对手动和半自动切割方式来说,可有效地提高板材切割的效率、切割质量,减轻操作者的劳动强度。
目前采用的是手工夹持操作方式对骨块进行切割,其准确性和安全性还有待于提高。对于不规则形状的骨块,需要研制适应不规则骨材料的智能化夹具,以提高安全性能和材料的获得率。
1 背景技术
骨切割机是制备骨植入材料的重要器械,在医疗、娱乐、科研、工业生产等许多领域都有着广泛的应用。机械手是骨切割设备研究的关键技术之一,在切割设备中起着夹持紧固的作用,机械手也是骨切割机最灵活的机械部分,因此机械手技术的发展在骨切割设备的研究中具有至关重要的地位。
德国DLR系列机械手已经有四代产品,研制的目的是在太空中提供舱内和舱外服务。英国Shadow公司的机械手The Smart Award Hand具有同人手完全相同的自由度,手指运动空间及抓力。其尺寸与人手相近,重约5~10 kg,而其“手指”的驱动速度大约是人的手指常速的一半。北京航空航天大学已发布了三代BH机械手,其中BH-3型是比较成熟的,已销往香港,澳大利亚作为实验室实验的模型。BH灵巧手系列的推出开创了国内机械手研究的先河,填补了当时国内多指灵巧手的研究空白,为我国多指手制造和控制技术的发展奠定了坚实的基础。另外还有意大利的DIST[5]机械手,日本的0kada[6]机械手,本田公司的机械手等等。
本文基于对骨植入材料的力学性能的分析,从仿生学原理入手,建立六自由度的手夹持结构力学模型,完成骨切割设备夹持手机械结构设计,以适应不规则形状骨材料的加工,满足临床对不同规格产品的需求,提高操作的安全性、骨料的利用率。
2 同种异体骨切割设备夹持装置设计
以不规则形状同种异体骨移植材料切割设备中夹持手机械结构的设计和研制为主,建立六自由度的夹持手机械结构力学模型,完成骨移植材料切割设备中夹持手的夹紧、推进和旋转等运动动作,以适应不规则形状骨材料的加工。夹持手机械结构具有四根手指,指尖上方直接连接测力传感器,通过受力分析帮助其夹持不规则骨,能满足临床对不同规格产品制作的需求,提高操作的安全性,骨材料的利用率。夹持手机械结构见图1。
2.1机械手的组成
设计机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对机械手结构及运行控制的要求。尽量选用定型的标准组件,简化设计制造过程,兼顾通用性和专用性,并能实现柔性转换和编程控制。机械手主要由执行机构、驱动系统组成。
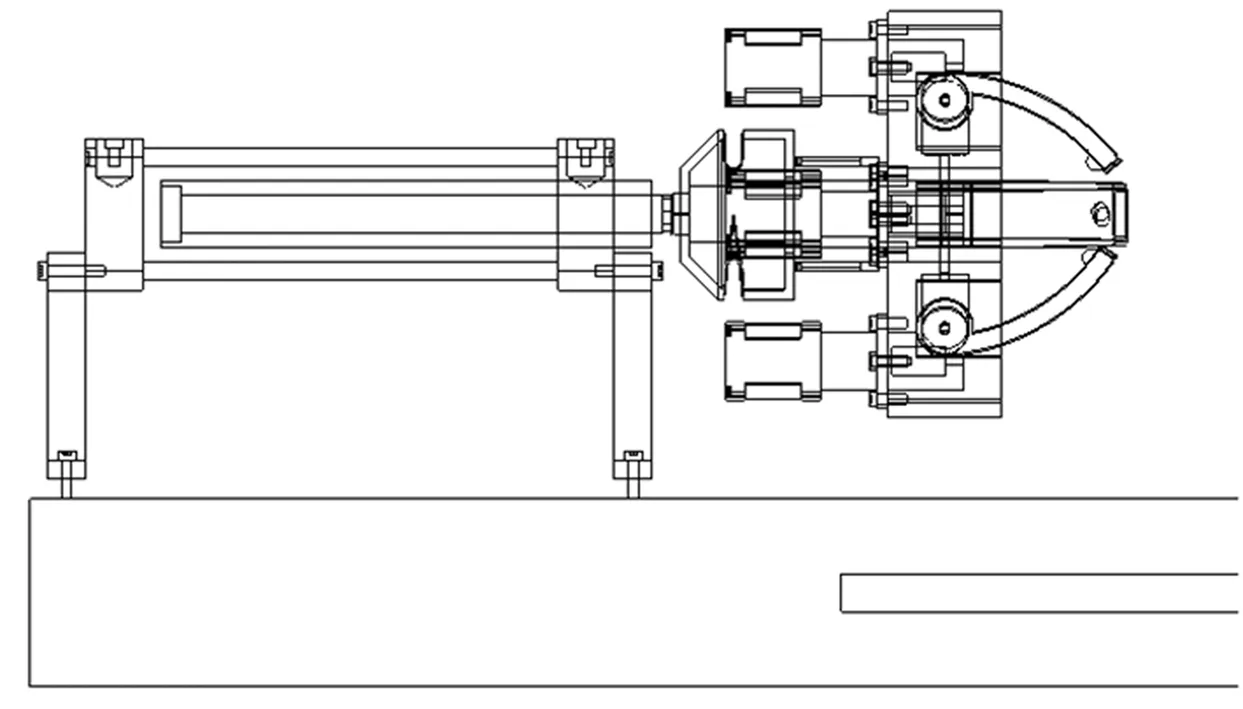
图1 夹持手机械结构图 Fig.1 Holding the hand of mechanical structure drawing
(1)执行机构
执行机构是由回转型手指和传动机构所构成。回转型手指是与物件接触的部件,共四只均匀分布设置在机械手腕的前面,分别穿过机械手腕与四台手指驱动电机传动相连,并与手指驱动电机之间通过蜗轮蜗杆机构传动。为了能有效的抓握各种形状不规则的骨组织,在各回转型手指的指尖内侧分别设有球面结构内装有压力传感器和距离传感器。回转型手指结构简单,容易制造,应用广泛。
(2)驱动系统
驱动系统是驱动工业机械手执行机构运动的动力装置调节装置和辅助装置组成。常用的驱动系统[7]有液压传动、气压传动、机械传动。
本装置采用的驱动方式为气压传动式[8],是以压缩空气的压力来驱动执行机构运动的机械手, 其主要特点是[9]:方便,输出力小,气动动作迅速,结构简单,成本低。但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击力大,所以适用于高速、轻载 、高温和粉尘大的环境中进行工作。
推进运动:由气缸驱动气缸活塞,由气缸活塞推动机械手水平方向的移动。其优点是动作迅速,反应灵敏。
旋转运动:手腕部由旋转气缸驱动,旋转气缸带动回转型手指旋转,可实现骨材料的360°旋转,使扫描仪扫描到骨材料的截面,为夹持操作提供必要的信息。
夹紧运动:四根回转型手指与手指驱动电机之间通过蜗轮蜗杆机构传动,指尖上方直接连接压力传感器和位移传感器,通过受力分析和位移判断帮助其夹持不规则形状骨,使其能够灵活应用于同种异体骨的精确切割,同时能满足植入医疗器械生产质量规范要求。
2.2机械手的整体结构
机械手整体结构见图3,主要包括:(1)底座 通过两个支架与平行气缸连接;(2)支架 安装在底座的后部,起到固定和支撑气缸的作用;(3)平移气缸 水平安装在支架上;(4)平行气缸活塞,完成机械手水平方向的推进运动;(5)旋转气缸安装座 连接在平移气缸的活塞前端; (6)旋转气缸 安装在旋转气缸安装座的前端,可带动机械手腕旋转,实现骨材料的360度旋转使扫描仪扫描到骨材料的截面;(7)手指驱动电机 共四台均匀分布安装在机械腕的后面,可通过涡轮蜗杆机构带动手指旋转;(8)电机-回转型手指连接装置 连接手指驱动电机和回转型手指;(9)回转型手指 共四只均匀分布在机械腕的前面;(10)压力传感器 共四个分别安装在四只回转型手指的指尖上,能有效的实现骨材料的合理抓握,避免因压力过大造成骨材料被破坏;(11)位移传感器 共四个分别安装在四只回转型手指的指尖上,能准确检测到骨材料跟手指之间的距离;(12)球状指尖结构 头部为球状的螺栓,与手指螺纹连接,可实现手指准确、稳定地夹紧各种不规则形状的骨材料,防止在夹持中骨材料的滑落或转动。
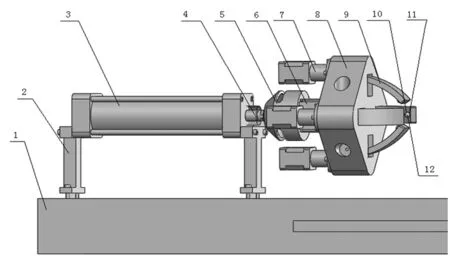
图2 机械手的整体结构Fig.2 Clamping manipulator of the whole structure
3 结论
本文从生物力学角度出发,分析同种异体骨移植材料的性能、受力特点和生理功能,以不规则形状同种异体骨移植材料切割设备中夹持手机械结构的设计与研制,建立六自由度的夹持手机械结构力学模型,完成骨移植材料切割设备中夹持手的夹紧、推进和旋转等运动动作,以适应不规则形状骨材料的加工。机械手夹持结构的设计,具有四根手指,指尖上方直接连接测力传感器,通过受力分析使其能夹持不规则骨材料,以满足临床对不同规格产品生产的需求,提高操作的安全性与骨材料的利用率。另外,可优化整个切割装置结构,使其能够灵活应用于同种异体骨的精确切割,同时能满足植入医疗器械生产质量规范要求。
[1] 翁习生. 骨移植及替代物在脊柱外科手术中的应用[J].当代医学,2002,8:33-39.
[2] 罗飞,许建中.结构性异体骨移植材料力学性能的影响因素[J].中华创伤杂志,2002,18(7):444-445.
[3] Czitrom AA. Allograft reconstruction after tumor surgery in The appendicular skeleton[M]. Czitrom AA. Gross AE. Eds. Allografts in orthopedic practice. Baltimore: Williams & Wilkins,1992.83-119.
[4] Khan SN, Cammisa FP, Sandhu HS, et al. The biology of bone grafting[J]. J Am Acad Orthop Surg, 2005,13(1);77-86.
[5] Caffaz A, Cannata G. The design and development of the DIST-Hand dexterous gripper[J]. Proceedings of IEEE International Conference on Robotics and Automation, Leuven,1998:2075-2080.
[6] Okada T. Computer control of multijointed finger system for precise object-handing[J]. IEEE Transaction on System, Man and Cybernetics, 1982,12(3): 289-299.
[7] Jacobsen S C, Wood J E, Knutti D F, et al. The UTAH/MIT dexterous hand: Work in progress[J]. The International Journal of Robotics Research,1984,3(4):21-50.
[8] 刘宏,姜力著.仿人多指灵巧手及其操作控制[M].北京:科学出版社,2010.
[9] 郑堤,唐可洪.机电一体化设计[M].北京:机械工业出版社,2005.
DesignofGrippingDeviceofAllogeneicBoneCuttingEquipment
Fang Xinguo, Sa La, Zhao Gaiping, Wang Chenxi, Bai Leilei
School of Medical Instrument and Food Engineering, University of Shanghai for Science and Technology(Shanghai ,200093)
Based on bionic principle and the mechanics analysis of bone implant materials, a mechanics model for hand clamping structure with six degrees of freedom is established and a gripping device for bone cutting is designed. It is suitable for the processing of bone materials of irregular shapes and can meet requirements for various specific clinic products. In addition, the operation safety and the efficiency of bone material utilization are both improved.
bone implant material, bone cutting, manipulator,holding structure
10.3969/j.issn.1674-1242.2014.02.008
方新果,E-mail: 343482371@qq.com
TH122
A
1674-1242(2014)02-0081-03
2014-04-23)
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
装备制造技术(2021年1期)2021-05-21 07:55:14
汉字汉语研究(2019年2期)2019-08-27 00:47:52
模具制造(2019年4期)2019-06-24 03:36:42
中国篆刻(2017年7期)2017-09-05 10:01:36
中国篆刻(2017年8期)2017-09-05 09:44:30
中国篆刻(2017年5期)2017-07-18 11:09:31
科技创新导报(2016年9期)2016-05-14 09:12:16
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53