两足辅助行走机器人步态控制
2014-09-13 23:55:16唐矫燕
上海电机学院学报 2014年1期
唐矫燕
(上海电机学院 机械学院, 上海 200245)
两足辅助行走机器人步态控制
唐矫燕
(上海电机学院 机械学院, 上海 200245)
智能两足辅助行走机器人,可以辅助残疾人在复杂环境中进行仿人行走。介绍了该机器人的机构和控制系统硬件,在机器人系统的步态特性基础上建立了人机一体的运动模型。运用零力矩点(ZMP)理论规划了机器人的行走步态,提出了局部步态调整与人体主动补偿运动相结合的实时步态稳定性控制策略。通过仿真实验对该控制策略进行了验证和分析。
两足机器人; 辅助行走; 步态规划; 稳定性控制
辅助行走机器人是一种帮助不便于行的人群实现正常空间运动的运动辅助装置,属于服务机器人的一个分支。其具有辅助人体、支撑体重、保持平衡和行走的功能。随着人类社会的老龄化以及社会对老弱病残人群的日益关怀,如何解决由于肌肉退化、萎缩或者疾病导致的行走不便问题,使行障者能够像正常人一样在复杂的生活环境中自由行走,引起了各大研究机构的兴趣。由于传统的轮椅存在着上下楼梯不便、复杂环境中移动困难等难以解决的问题,而拐杖对于人体的平衡力和上肢力量的要求比较苛刻;因此,研究新的助行技术具有重要的实际意义。为了帮助老年人和残疾人实现更高质量的独立生活,各种先进机器人技术与传统助行器相结合而产生的智能辅助行走机器人,已成为国内外科研机构的研究热点。
目前,国内外已开发出了众多的辅助行走机器人样机系统。其中较为成功的有爱尔兰的PAM-AID助行机器人、美国的SmartCane助行机器人、韩国的WAR助行机器人、日本MOBIRO、Winglet、HITACHI助行机器人等轮式辅助行走机器人[1-3],韩国的可穿戴式外骨骼机器人[4]、日本筑波大学的HAL商业外骨骼机器人[5-6]、美国的伯克利下肢末端外骨骼[7]等向人提供动力,辅助人体机能的外骨骼机器人。但这些助行机器人在现实应用中仍然存在较大的局限性。轮式的助行机器人对路面、环境的要求比较高,而外骨骼机器人对于人体自身运动平衡能力的要求较高,不适用于行动不便的残疾人或老年人。而两足步行机构能够模仿人体行走步态,环境适应性具有明显的优势。随着仿人两足步行机器人研究的发展,尤其是最近几年在两足机器人行走的平衡稳定控制方面取得了显著的进步[8-13],为两足辅助行走机器人奠定了理论基础;因此,开发可以辅助残疾人稳定行走的两足机器人逐渐成为一个研究的热点[14-15]。
1 智能两足辅助行走机器人
1.1机器人机构设计与建模
两足辅助行走机器人是通过传感器和人机交互系统获得人体的运动控制信号,通过设定的智能控制算法,生成机器人下肢的稳定步态,其机构设计如图1所示。
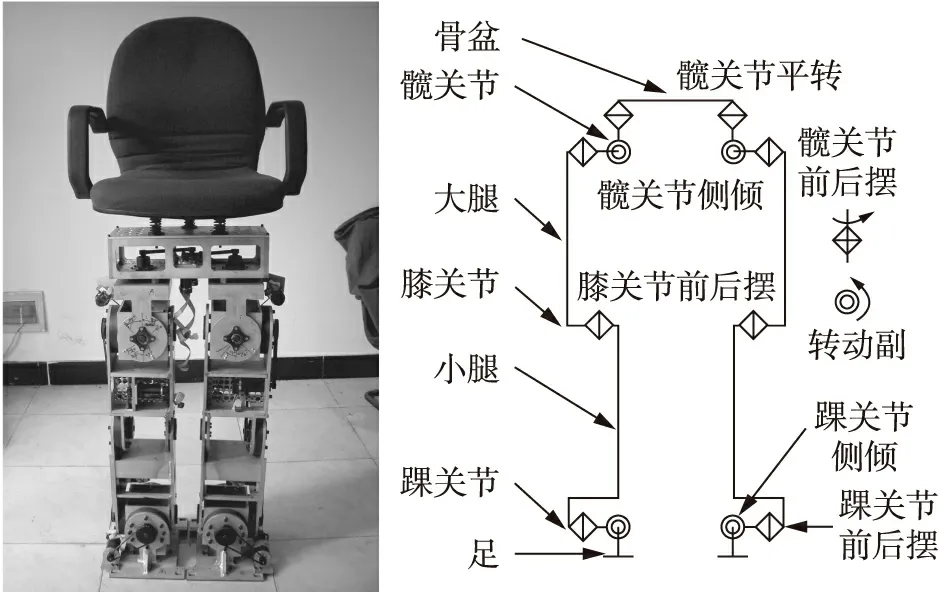
图1 两足辅助行走机器人及其自由度分配Fig.1 Biped auxiliary walking robot anddegree-of-freedom distribution
为了获得仿人的行走步态,则每条腿需要8个自由度,即髋关节3个,膝关节1个,踝关节3个,脚部1个。综合考虑成本和设计目标,参考了目前两足机器人腿部设计的典型方式,设计的两足步行椅机器人采用了每条腿6自由度的配置方式,即髋关节3个,膝关节1个,踝关节2个,且所有的自由度为转动。由于需要较大的减速比,为此,采用同步带和谐波减速器组合的方式作为机器人的减速装置。
在机器人辅助行走状态下,建模时,由于人体不像座椅那样保持垂直不动,而是固定在座椅上;因此,可以将人体视为一个一端与机器人髋部铰连接的杆件,其长度、质量为可变量,人体的运动可以简化为杆件的摆动,由此得到机器人前向8连杆模型和侧向6连杆模型如图2所示。
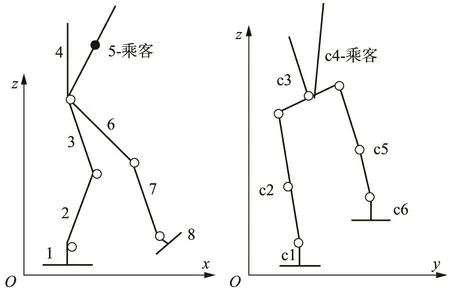
图2 前向和侧向运动模型Fig.2 Forward and lateral motion model
1.2机器人控制系统硬件设计
选用Maxon公司的直流电动机及其配套的数字编码器。其中,RE30电动机的编码器为数字MR编码器,L型,直流(DC)工作电源,工作电压为(5±5%) V,分辨率为1000线,最大工作频率为200kHz;RE40电动机的编码器型号为HEDL 55,DC工作电源,工作电压为( 5±5%) V,分辨率为1000 线,最大工作频率为100kHz。选用香港雷科赛自动化科技公司的DB810数字式直流伺服驱动器。该款驱动器的供电电压范围为DC18~80V,电流输出范围为0~20A(均值10A),编码器最小分辨率为200线。
两足辅助行走机器人的控制系统采用基于PC的开放式结构控制,用Baldor NextMove PCI-2智能可编程多轴运动控制卡作为运动控制核心。该控制卡最多可同步支持12路控制通道,自带CAN总线接口和RS-485/232接口,具备丰富的数字及模拟I/O口,可为基于PC平台的自动化应用提供一种灵活的多合一控制解决方案。该控制卡支持高达10MHz的位置反馈数据采样率,其伺服回路调节时间仅为100μs,非常适合那些需要较高数据传输速率或处理开销较大的多轴运动控制应用。运动控制程序的开发也可以在NextMove PCI2卡所提供的编程环境下完成,可用VC或VB编程。整体控制构架如图3所示。
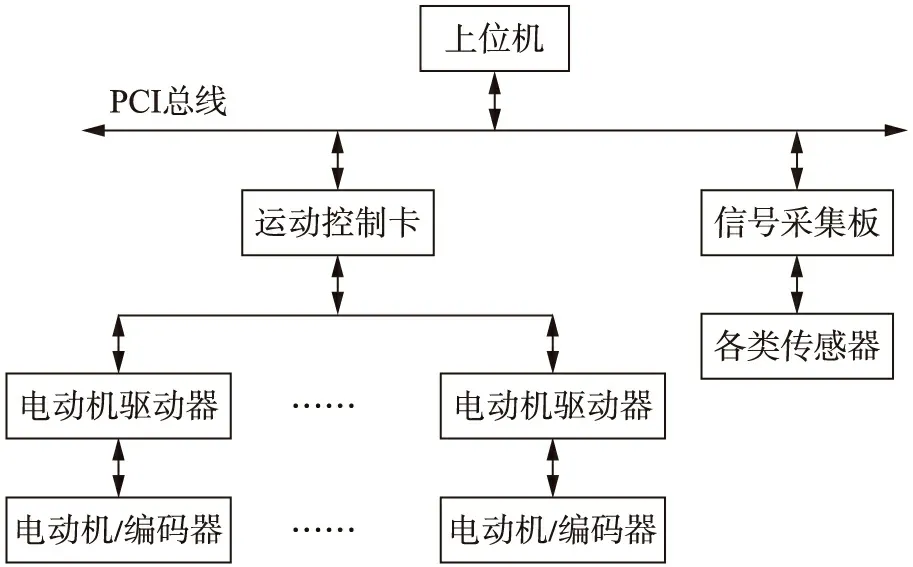
图3 控制系统架构图Fig.3 Sketch of the control system
2 智能辅助行走机器人步态控制
要规划机器人的步态,首先要保证机器人行走过程中的稳定性和安全性。从目前国内外先进的两足机器人步态稳定性控制的研究现状来看,尚未有成熟的研究成果发布。在仿人两足机器人研究领域,对外界干扰的实时稳定控制主要包括模仿人类平衡策略的稳定性控制和基于零力矩点(Zero Moment Point, ZMP)的稳定性控制。智能两足辅助行走机器人实时稳定控制因外界受力条件的复杂性和被辅助人员的身体运动所产生的受力不确定性、不可控性,不能达到机器人上身与下肢的完全协调运动;因此,本文采用基于ZMP的稳定性控制方法,通过局部步态调整和人体主动补偿相结合的方法,进行稳定步态的实时控制。
2.1基于ZMP稳定性控制的步态规划
基于ZMP稳定性控制是指在理想情况下,当两足机器人步行时,实际ZMP点和规划的ZMP点是重合的;而在实际步行时,两者往往不重合并由此产生力矩,称作翻转力矩。这时通过调整机器人的姿态,产生新的ZMP规划轨迹,从而使系统恢复稳定。基于ZMP稳定性控制的典型案例是本田公司的2号类人型机器人(P2)。从实际的效果看,P2是通过调整机器人上身运动轨迹来实现稳定性控制的。
采用图2中的机器人运动模型,其ZMP坐标值计算公式如下:
xZMP=
(1)
yZMP=
1≤i≤n
(2)
在理想状态下,取人体质量60kg;机器人大腿长300mm,质量7kg;小腿长300mm,质量6kg;脚掌尺寸220mm×300mm,踝关节高125mm,脚部质量2kg;椅子质量20kg;髋关节高度为600mm;步行速度0.5m/s,步长0.5m。在机器人髋关节处建立移动坐标系,使用图2中的机器人前向8连杆模型和侧向运动6连杆模型,将理想数值代入式(1)、(2)得到的机器人前向、侧向ZMP稳定区域、规划轨迹如图4和5所示。由于机器人步态的规律性,取两个步长周期观察即可。从图中可以看出,双足支撑期间的规划ZMP轨迹非常靠近稳定区域的中心,这使得步行具有很好的稳定性;但是,在两足支撑期向单足支撑期切换时,可以看到ZMP轨迹与侧向稳定区域边界非常接近,即步行的侧向稳定裕度较小,需要保证步行的控制精度,以免机器人摔倒。
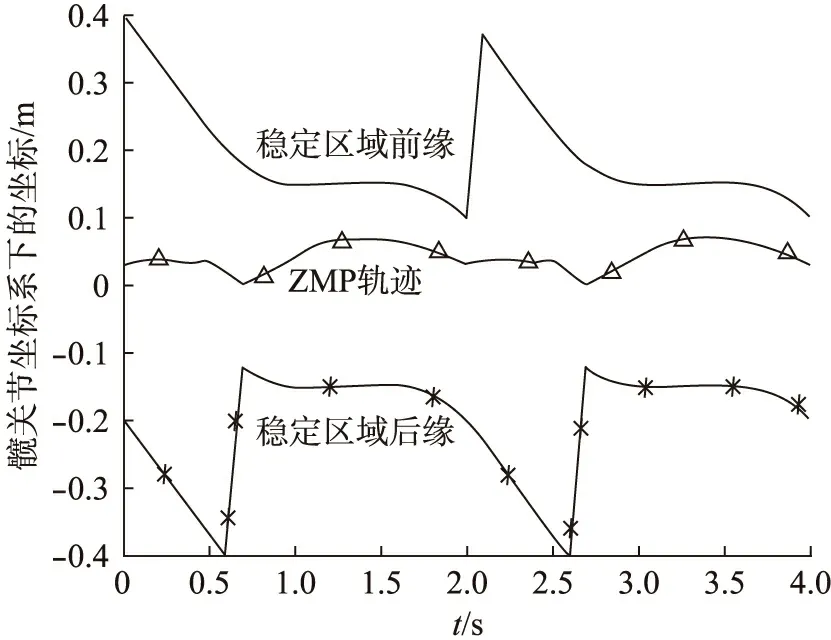
图4 前向ZMP稳定区域与规划轨迹Fig.4 Forward stability region and planned ZMP trajectory

图5 侧向ZMP稳定区域与规划轨迹Fig.5 Lateral stability region and planned ZMP trajectory
2.2基于局部调整的实时步态稳定性控制策略
在机器人实际行走过程中,机器人受未知外力、人体运动等干扰因素影响,使得机器人的实际ZMP偏离规划的ZMP轨迹,从而容易导致运动方向的不可控,甚至由于超出稳定区域从而导致翻倒事故。因此,必须进行实时的步态矫正与控制,以保证系统的安全性。
智能两足辅助行走机器人的主控制器接收环境信号、机器人各关节信号、人体的力与力矩信号、人体的控制命令输入信号,进行多信号融合,判断系统稳定性并进行运动规划。当步态稳定时,如果控制命令输入信号在安全区域,则执行命令;如果控制命令输入信号不在安全区域,则对机器人步态进行调整,在保证稳定的前提下最大程度的实现乘客意图。当步态处于失稳状态时,立即对步态进行调整,并反馈给乘客,以便于乘客参与控制。
根据步态规划得到的机器人运动姿态及设定的环中人的运动参数,可以计算出任意时刻的机器人系统的实际ZMP值。以机器人前进方向的步态控制为例,定义其稳定区域前缘为Sb(t),后缘为Sf(t),则前向稳定区域可以表示为[Sb(t),Sf(t)],则计算得:
(3)
Sf(t)=(k+1)Ds+lff,
t∈[kTc,(k+1)Tc]
(4)
式中,k为步数;Tc为步行周期;Ds为步长;Td为一个步行周期中双脚落地的时间;lfb为后支撑足踝关节与后缘之间的长度;lff为前支撑足踝关节与前缘间的长度。得到稳定区域和零力矩点的时间函数后,就可以判断机器人系统的稳定程度。
从步态规划过程可知,该系统在理想状态下是稳定的。稳定区域是由支撑脚掌所组成的凸形区域在水平面上的投影。在单脚支撑期间,这一凸形区域投影就是支撑脚的脚底板面;在双脚支撑期间,这一凸形区域投影为两支撑脚底板触地点所构成的凸形最大区域。当受外界干扰力或人体运动影响时,必将导致系统的ZMP的偏移。若系统ZMP坐标仍处于规划好的稳定区域内时,系统维持稳定状态;反之,将引起系统失稳,此时系统必须通过对人体和机器人姿态进行调整,重新进行步态规划等控制操作以保持整个系统的稳定性。
定义各传感器得到的系统各部分运动参数为
X=(x1,x2,…,xm,xm+1,xm+2,…,xn)T
其中,前m个信号为机器人各关节的运动信号,定义为Y1=(x1,x2,…,xm),后n-m个信号为检测到的人体运动参数,定义Y2=(xm+1,xm+2,…,xn);因此,X=(Y1,Y2)T。要注意的是: 机器人关节运动输入信号Y1反映的是可以通过控制命令进行调整的运动参数,而Y2反映的是不能由系统直接控制改变的人体运动参数。对于作为研究基础的两足步行椅机器人来说,在实际实验中,一般取m=7,n=10;因此,Y1=(θ1,θ2,θ3,θ4,θ5,θ6,θ7)。
定义机器人步态的安全裕度函数为D(X),则系统各参数的安全域可表示为:R(c)={X∶D(X)≥c},其中,c为设定的最小稳定裕度值,且c>0。当X∈R(c)时,表明系统处于稳定状态,机器人可以按照步态规划的轨迹运行。当X∉R(c)时,表明系统处于失稳状态,控制系统必须进行实时的步态调整。由于人体运动信号不可控,故系统只能通过调整两足机器人下肢各个关节输入信号的方式进行步态调整。对于两足步行椅机器人,定义调整后的机器人各关节参数量Y1r=(θ1r,θ2r,θ3r,θ4r,θ5r,θ6r,θ7r),则调整后的参量为Xr=(Y1r,Y2)T。从理论上推导,满足稳定性的Xr有无穷解,而其中的最终解要求在保证机器人运动的连续顺滑和安全稳定的基础上,实现最小的调整幅度,从而提高效率,最大程度实现人类的意图。

(5)
式中,l(Y1)∈[0,1],可以为任意的连续函数。则定义
Y1rL=S(Y1)Y1+[1-S(Y1)]K(Y1)
(6)
2.3考虑人体主动运动补偿的实时控制策略
机器人系统补偿控制包括机器人下肢的步态调整和人体的运动补偿两个方面。当机器人系统产生失稳时,可以通过人体姿态与用力的主动调整,使机器人能够通过较小幅度的步态调整恢复系统稳定,从而保持机器人步态的平稳性。机器人系统的实时补偿运动控制结构如图6所示。加入补偿控制后,在机器人受到外界较大干扰时,通过调整人体状态,并对机器人下肢运动进行局部调整即可。避免了重新进行步态规划的工作,保证了机器人行走的平稳。人体补偿运动的幅度,可以通过乘客参数对系统稳定性的影响权重进行计算,其结果通过人机交互界面对人体运动进行指导。
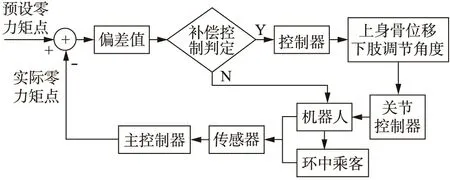
图6 考虑人体运动补偿的机器人实时控制结构图Fig.6 Structure of real-time control withhuman motion compensation
3 仿真实验
仿真实验为考虑人体主动运动补偿的仿真结果。其中,机器人各部分的物理参数如前文所述,考虑人体自主运动对稳定性的影响以及外力干扰的结果。选取两个步行周期,机器人在按照规划步态行走的过程中受到一外力影响,其稳定裕度曲线的仿真结果如图7所示。图中横坐标为时间,纵坐标为步态的稳定裕度,其结果由式(3)~(6)得出。图中曲线1是按照预先规划的步态行走时的稳定裕度曲线。可以看到,未经过实时在线控制时,载人两足步行机器人的步态稳定裕度出现了小于零的情况,这就意味着在该外力作用下,机器人步态将出现失稳现象,如果不进行稳定控制,必将导致机器人的翻倒现象。图中曲线2为通过局部步态调整后的稳定裕度曲线,可以看到,对于系统失稳情况不严重,即在稳定裕度值不太小的情况下,通过局部步态调整就可以完成系统的稳定控制。随着系统失稳情况的加重,局部步态调整的幅度会越来越大,这就意味着系统步态的顺滑性将受到影响,系统的步行效率将下降。当系统失稳达到一定程度时,将超出局部步态调整所能够修正的极限,此时,单单使用局部步态调整的方法已经不能够保证系统的步态稳定性控制。图中曲线3为加入人体主动补偿后的稳定裕度曲线。从结果可以看出,在进行了补偿修正后,机器人的步态稳定裕度大大增加,即使受到外力的影响,系统仍可以保持一个较大的稳定裕度;并且在进行乘客补偿运动后,机器人的步态调整幅度减小,甚至不需要进行步态调整也可以保持系统的步态稳定。这就证明了该方法可以提高载人两足步行椅机器人的步行效率和步态的顺滑性。
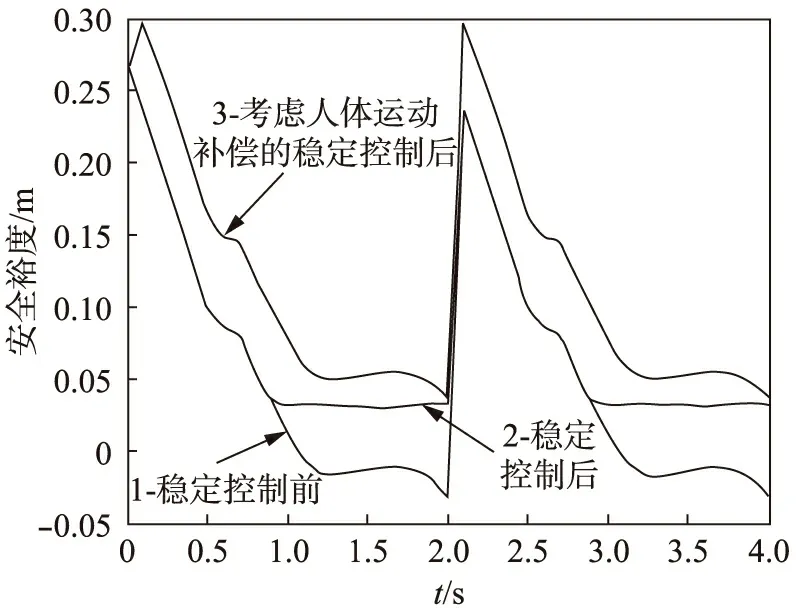
图7 实时控制仿真结果Fig.7 Simulation result of real-time control
4 结 语
本文介绍了一种智能两足辅助行走机器人机构及其运动控制策略。建立了该机器人的运动学模型,并在此基础上进行了基于ZMP稳定性控制的步态规划方法。考虑到其受外力以及人体干扰的不可控性,对其实时运动控制策略进行了分析研究,通过仿真实验验证了该控制策略的可行性。该控制策略能够通过乘客的主动补偿运动,提高机器人步态的稳定性,使失稳状态下的机器人通过较小的下肢步态调整幅度即可恢复系统的稳定性,从而提升系统的步态顺滑性和机器人的工作效率。
[1] Namara S M,Lacey G.A smart walker for the frail visually impaired[C]∥Proceedings of the 2000 IEEE International Conference on Robotics and Automation.San Frandsco: [s.n].2000: 1354-1359.
[2] Yu H,Spenko M,Dubowsky S.An adaptive shared control system for an intelligent mobility aid for elderly[J].Autonomous Robots,2003,15(1): 53-66.
[3] Shim H M,Lee E H,Shim J H,et al.Implementa-
tion of an intelligent walking assistant robot for the elderly in outdoor environment[C]∥Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics.Chicago,IL,USA: [s.n],2005: 452-455.
[4] Kong K,Jeon D.Design and control of an exoskeleton for the elderly and patients[J].IEEE/ASME Transactions on Mechatronics,2006,11(4): 428-432.
[5] Kawamoto H,Sankai Y.Power assist system HAL-3 for gait disorder person[C]∥Computers Helping People with Special Needs.Berlin: Spring-velag Berlin Heidelberg,2002: 196-203.
[6] Nozawa M,Sankai Y.Control method of walking speed and step length for hybrid assistive leg[C]∥Computers Helping People with Special Needs.Berlin: Spring-velag Berlin Heidelberg,2002: 220-227.
[7] Ghan J,Steger R,Kazerooni H.Control and system identification for the Berkeley lower extremity exoskeleton[J].Advanced Robotics,2006,20(9): 989-1014.
[8] Kim J Y,Lee J,Ho J H.Experimental realization of dynamic walking for a human-riding biped robot,HUBO FX-1[J].Advanced Robotics,2007,21(3-4): 461-484.
[9] 付成龙,陈恳.双足机器人稳定性与控制策略进展[J].高技术通讯,2006,16(3): 319-324.
[10] 夏泽洋,陈恳,熊璨.仿人机器人运动规划研究进展[J].高技术通讯,2007,17(10): 1092-1099.
[11] 曾强,方跃法.双足步行机器人整体协调运动规划[J].机械,2007,34(2): 53-56.
[12] 王瑜,曹恒,凌正阳,等.基于人机系统运动仿真的数字人步态规划方法[J].华东理工大学学报,2010,36(3): 447-451.
[13] 宋宪玺,周烽,梁青,等.双足机器人上楼梯步态的规划与控制[J].计算机仿真,2011,28(4): 476-180.
[14] Sugahama Y,Hosobata T,Mikuriya Y,et al.Realization of dynamic human-carrying walking by a biped locomotor[C]∥Proceedings of the 2004 IEEE International Conference on Robotics and Automation.New Orleans: [s.n],2004(3): 3055-3060.
[15] Tang J,Zhao Q,Yang R.Stability control for a walking-chair robot with human in the loop[J].International Journal of Advanced Robotic Systems,2009,6(1): 47-52.
Gait Control for a Bipedal Walking Auxiliary Robot
TANGJiaoyan
(School of Mechanical Engineering, Shanghai Dianji University, Shanghai 200245, China)
An intelligent bipedal walking auxiliary robot can assist the disabled for humanoid walking in complex environments. The mechanism and control system hardware of the robot are introduced. A motion model of the man-machine integration system is established based on a gait characteristics analysis. The zero moment point(ZMP) theory is used for the planning of the robot gait. A real-time gait stability control strategy combined with local gait adjustment and human active compensation is proposed. The strategy is verified and analyzed in simulation experiments.
bipedal walking robot; auxiliary robot; gait planning; stability control
2013 - 10 - 27
上海电机学院科研启动经费项目资助(11C420)
唐矫燕(1975-),男,讲师,博士,主要研究方向为智能机器人、机器视觉,E-mail: tangjy@sdju.edu.cn
2095 - 0020(2014)01 -0015 - 06
TP 242
A
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
今日农业(2021年4期)2021-06-09 06:59:58
公民与法治(2020年20期)2020-11-27 01:44:46
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:35
电测与仪表(2016年2期)2016-04-12 00:24:36
核科学与工程(2015年2期)2015-09-26 11:57:13
电测与仪表(2015年5期)2015-04-09 11:30:46
发明与创新(2015年33期)2015-02-27 10:40:00