
一种升降台式雷达速调管维修移动小车*
2014-09-11 02:27卢德辉王劲宣邵世东
电子机械工程 2014年6期
卢德辉,王劲宣,邵世东
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
一种升降台式雷达速调管维修移动小车*
卢德辉,王劲宣,邵世东
(中国电子科技集团公司第三十八研究所, 安徽 合肥 230088)
雷达速调管是雷达发射系统的重要组成部分,在使用过程中需要经常维护,其搬运及维护通常采用人工方式进行,十分费时费力,劳动强度较大。文中提出了一种升降台式雷达速调管维修移动小车, 该小车具有安全性高、操作方便、扩展性及通用性强等特点,它采用剪刀架式液压升降平台的结构形式,这种新颖的结构形式能够满足速调管快速装配的需要,可降低劳动强度,提高工作效率,同时还可消除在移动过程中工作平台上的速调管发生倾覆的隐患。该移动小车对指导同类设备的设计具有一定的参考价值。
速调管维修;移动小车;液压系统
引 言
速调管是雷达设备中大量使用的一种微波电子管,其功能是将注入其腔体的微波信号不失真地放大,获得大功率信号输出[1]。雷达速调管是雷达发射系统的重要组成部分,一般安装在电子设备方舱发射机室内的速调管发射机柜中[2]。速调管的重量一般在100 kg左右,如何在电子方舱内将如此重的设备顺利安装在机柜中成为一大难点;由于有电磁屏蔽和防雨密封等要求,电子方舱内须设门槛,门槛通常高60 mm左右,而速调管属于比较精密的微波仪器,为确保人员安全和设备完好无损,在通过该门槛时要求维修车上部平台平稳,不能存在倾覆隐患,所以如何让维修车平稳跨越门槛成为又一个难点。通常情况下,速调管的维修完全由人力完成,需4个人操作,先把100 kg的速调管从速调管机柜中拆卸下来,用人力将其放到平板车上,在跨越方舱门槛时需几人同时协作,保持平板车平稳,防止其倾覆。这种方式费时费力,效率低下,同时存在倾覆隐患,安全性低。
国内外关于速调管维护装置的研究文献很少,而速调管维护迫切需要一种方便、快捷的搬运维修方式,因此很有必要研制一种用于速调管维修搬运的自动化装置。针对上述现状,本文提出了一种升降台式雷达速调管维修移动小车。这种结构形式能够满足速调管快速装配的需要,可降低劳动强度,提高工作效率,还可消除速调管在移动过程中倾覆的隐患,安全性高。该小车结构不仅可以应用在速调管维修搬运方面,还可以拓展到有相似要求的其他设备上。
1 速调管安装概述
速调管发射机柜在电子方舱内的安装位置如图1所示,速调管在速调管机柜中的安装位置如图2所示。

图1 速调管机柜在电子方舱内的位置示意图

图2 速调管在机柜中的安装位置示意图
2 维修移动小车设计
2.1 维修移动小车技术指标要求
雷达速调管维修移动小车的主要技术指标要求如下:
1)在方舱内可用人力推行,可跨越60 mm高的门槛;
2)升降范围为450~800 mm,连续可调;
3)最大展开外形尺寸为750 mm × 550 mm × 800 mm,最大收拢外形尺寸为700 mm × 550 mm × 450mm;
4)小车自重小于100 kg,可承重200 kg。
2.2 维修移动小车设计方案
2.2.1 维修移动小车的结构
雷达速调管维修移动小车采用组合式结构,由下部框架、上平台、越障装置、液压系统和举升装置等分系统组成。其具体结构包括扶手、转接盒、上平台、从动臂、液压油箱、起吊钩、下框架、越障轮支座、连杆、驱动油缸、脚踏泵、叉车孔、转向轮、手动换向阀、举升油缸等,如图3所示。
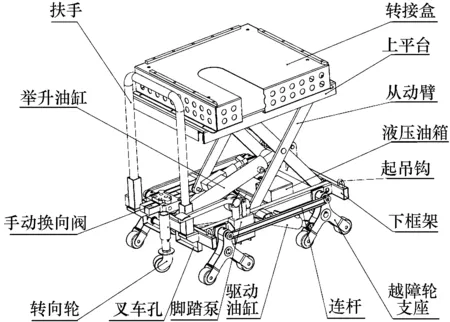
图3 小车结构示意图
升降平台采用4组固定轮和1个万向轮。4组固定轮每2个为1组,同侧的2组通过连杆联接,并用一个双作用缸驱动;万向轮的高度可以通过机械装置调整。
下部框架是升降台的基础部分,它承载了升降台的其他所有系统。下部框架由型钢和折弯板焊接而成,框架上部四角设有起吊钩,下部设有叉车孔,方便设备搬运。
上平台用于承载维修工件,由工作台和转接盒2部分组成。转接盒为可拆卸机构,工作时固定在工作台上,平时储存期间可以拆下来,节省升降台的存放空间。
越障装置由2组主动转轮、2组从动转轮、2根连杆和1套转向轮组成。2组主动转轮通过1根通轴联接在一起,在支撑油缸的驱动下, 2组主动转轮可以绕通轴同步转动,在连杆的作用下, 2组从动转轮分别和同侧的主动转轮实现同步转动。
液压系统由脚踏泵、液压油箱、举升油缸、支撑油缸和多路阀组成。脚踏泵为意大利HANSA公司的产品,它为整个液压系统提供动力源;多路阀控制液压油的流向,实现2组油缸的伸缩动作。液压系统中装有溢流阀、顺序阀等安全装置[3],以防止油路过载及避免由于油管破裂引起的意外事故,保证设备的安全操作。
举升装置位于下部框架和上平台之间,在举升油缸的驱动下,可以实现上平台的升降动作。举升装置采用剪刀架结构,由1个驱动臂和2个从动臂组成。
2.2.2 维修移动小车通过方舱门槛的方案
该速调管维修移动小车在方舱中使用时最大的难点是通过方舱门槛。通过60 mm高的门槛采用的方案为:当前轮接近门槛时,先将转向轮收起,然后操作脚踏泵驱动支撑油缸伸出将前面一侧轮子抬起,推车继续前进,当前面一侧轮子通过门槛后,操作脚踏泵驱动支撑油缸完全缩回将后面一侧轮子抬起,推车再次继续前进,此时前面2组固定轮完全通过门槛。重复上述操作,可以使后面2组固定轮通过门槛。通过方舱门槛的过程如图4所示。
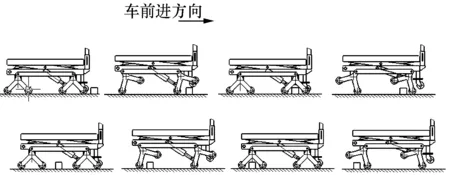
图4 小车过门槛示意图
该方案的优点在于维修车在通过门槛时上部平台没有倾斜,不存在倾覆隐患,安全性高。
2.3 液压系统设计
2.3.1 液压部分各主要部件的参数
液压系统是该小车结构的重要组成部分,液压部分各主要部件的参数如下:
1)脚踏泵型号为 GL144P-24,排量为8.1 ml/次,最高压力为10 MPa;
2)液压油箱的外型尺寸为110 mm × 103 mm × 61 mm,有效容积为0.51 L;
3)举升油缸的缸径为 50 mm,杆径为 30 mm,行程为 92 mm,安装距为 494 mm,工作压力为 10 MPa;
4)伸缩油缸的缸径为40 mm,杆径为25 mm,行程为44 mm,安装距为212 mm,工作压力为10 MPa;
5)多路阀的流量为0.5 L/min,工作压力为10 MPa,工作介质为矿物油,2个手柄均为3个位置,主溢流阀最高调节压力为10 MPa;
6)顺序阀采用板式安装,最高设定压力为15 MPa。
图5为升降台液压系统的原理示意图。

图5 液压系统原理图
2.3.2 设计计算
(1)油缸受力计算
经过运动仿真分析,举升油缸受力最大时位于举升起始的瞬间,最大受力为14 083 N,油缸受力分析如图6所示。

图6 油缸受力分析图
(2)液压系统计算
1)举升油缸参数。单作用缸的缸径为50 mm,杆径为30 mm,行程为110 mm,最小安装距为518 mm。举升油缸受力最大时需要的供油压力为
P1=F1/S1= 14 083 ÷(3.14 × 0.025 ×0.025)=7.17 MPa
式中:F1为举升油缸的最大受力;S1为举升油缸的面积。
2)支撑油缸参数。双作用缸的缸径为40 mm,杆径为25 mm,行程为66 mm,最小安装距为200 mm。支撑油缸受力最大时需要的供油压力为
P2=F2/S2=(390 ÷ 2 × 9.8)÷ [2 × 3.14 ×(0.022 -0.012 52)] = 1.25 MPa
式中:F2为支撑油缸的最大受力;S2为支撑油缸的面积。
液压油箱的容积计算式为
V=V1+V2
式中:V1为举升油缸的容积;V2为支撑油缸活塞腔与杆腔的容积差。
V1= 0.215 L,V2= 0.059 L,则V= 0.215 + 0.059 = 0.274 L。取油箱容积为0.5 L。
3)选取的脚踏泵参数。排量为8.1 ml/次;最高压力为10 MPa;将举升油缸完全伸出需要操作脚踏泵的次数为215 ÷ 8.1= 26.5次;脚踏泵踏板处需最大压力为34.1Pa;将支撑油缸完全伸出需要操作脚踏泵的次数为2 × (3.14 × 2 × 2 × 6.6)÷ 8.1= 20.4次;将支撑油缸从全伸状态到全缩状态需要操作脚踏泵的次数为 2 × 3.14 × (22-1.252)× 6.6 ÷ 8.1= 12.4次。
3 结束语
本文根据雷达速调管维修移动小车主要技术指标要求,合理考虑小车的结构形式,采用了剪刀架式液压升降平台的结构方案。小车在使用过程中体现出良好的使用性,极大地方便了速调管的维修。
雷达速调管维修移动小车的有益技术效果体现在以下几个方面:
1)能够满足速调管快速装配要求,降低了劳动强度,提高了工作效率;
2)通用性强,采用组合式设计方案,标准化设计程度高,不同功能的速调管具有相似的结构外形与安装方式,改变转接盒的尺寸,即可满足新类型速调管的装配维修要求;
3)安全性高,可消除在移动过程中工作平台上速调管倾覆的隐患。
[1] 支竣. 新一代天气雷达速调管的结构、原理及更换[J]. 气象水文海洋仪器, 2012, 29(1): 92-94.
[2] 邱成悌, 赵惇殳, 蒋全兴. 电子设备结构设计原理[M]. 南京:东南大学出版社, 2005.
[3] 杨奇顺, 侯波. 剪叉式升降台液压节能系统设计[J]. 煤矿机械, 2009, 30(9): 42-43.
A Knee-type Mobile Car for Radar Klystron Repair
LU De-hui,WANG Jin-xuan,SHAO Shi-dong
(The38thResearchInstituteofCETC,Hefei230088,China)
The radar klystron is an important part of the radar transmitter system. It needs to be maintained frequently during work. Manual handling is usually adopted for transportation and maintenance of the radar klystron. Manual handling is time-consuming and requires hard labor. A knee-type mobile car for radar klystron repairing is proposed in this paper. The car is characterized by convenient and safe operation, strong expandability and generality. It has a novel structure of scissors-form lifting platform. This structure can meet the quick assembly requirement of the radar klystron. Thus the labor intensity is decreased and the work efficiency is improved. In addition, the overturning hazard of the klystron on the platform in movement can be avoided and the operation safety is enhanced. The car proposed in this paper can provide reference for design of similar equipment.
klystron maintenance; mobile car; hydraulic system
2014-07-23
国家科技支撑计划基金资助项目(2011BAH24B05)
TN876.7
A
1008-5300(2014)06-0040-03
卢德辉 (1976-) ,硕士,高级工程师,主要从事电子设备结构设计工作。
猜你喜欢
演艺科技(2021年5期)2021-06-05
冶金设备(2020年2期)2020-12-28
演艺科技(2020年5期)2020-07-15
技术与市场(2020年3期)2020-03-26
当代陕西(2019年8期)2019-05-09
发明与创新·中学生(2019年3期)2019-03-20
纤维复合材料(2018年2期)2018-12-07
黄河之声(2016年24期)2016-04-22
中国火炬(2015年3期)2015-07-31
汽车零部件(2014年5期)2014-11-11
