基于永磁同步电机的航空稳定平台伺服系统实现
2014-09-06 10:56:13,
机械与电子 2014年11期
,
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
基于永磁同步电机的航空稳定平台伺服系统实现
常九健,倪田荣
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
传统的航空稳定平台一般采用直流有刷电机进行驱动,由于该种电机具有电刷和换向器,存在高空低温电刷易结霜、电刷易产生电火花等问题,严重影响了电机的使用寿命。同时该种电机电刷的摩擦力矩是影响电机力矩平稳性的一项重要因素。相对于直流有刷电机而言,永磁同步电机采用电子换相,不存在以上问题,更适合于航空环境。设计了基于永磁同步电机的伺服系统,研究了矢量控制方式。实验测试结果表明,基于永磁同步电机的伺服系统各项指标满足实际系统的要求。
雷达结构;维修度;虚拟维修;交互式评价
0 引言
影响稳定平台性能的因素主要包括机械结构、测量元件和干扰力矩等几个方面。而干扰力矩又是影响稳定平台精度的主要因素。干扰力矩主要包括轴承的摩擦力矩、电机电刷的摩擦力矩、导电环的摩擦力矩等[1]。
力矩电机具有转速低、力矩大和线性度好等优点,可以长时间运行在较低的转速下。现有的航空稳定平台大部分采用直流有刷力矩电机进行驱动[2]。直流有刷电机具有力矩线性度好、控制简单等优点[3]。但是由于电刷的存在,该种电机存在高空低温电刷易结霜、电刷易产生电火花等问题,严重影响电机的使用寿命[4]。同时电刷的摩擦力矩是影响电机力矩平稳性的一项重要因素。相对于直流有刷电机而言,永磁同步电机不存在电刷,不存在以上问题[5]。
1 永磁同步电机工作原理和数学模型
永磁同步电机的电流频率和电机转速的关系为:
n为电机转速;f为电流频率;p为电机的极对数。
当电源频率不变,负载在一定限度内改变时,电机的转速就可以保持不变。这是同步电机的基本特点。
永磁同步电机工作原理如图1所示,当定子绕组中通有频率为f的交变电流时,定子就会产生一个旋转磁场。定子产生的旋转磁场用一对旋转磁极N1、S1表示。根据N极与S极相互吸引的原理,定子的等效磁极就会和转子的永磁磁极相互吸引,最终使定子的轴线和转子的轴线对齐,即δ角为零。定子产生的旋转磁场以转速n1旋转时,定子的旋转磁场会带着转子以相同的转速n1一起旋转。当在转子上逐渐增加负载,即转子的负载转矩逐渐增大,此时,定子磁极轴线与转子磁极轴线间的夹角δ就会相应地被拉大,当负载转矩减小时,夹角δ又会减小。定子和转子的两对磁极间的磁力线就如同弹性的橡皮筋一样随着负载的变化不断地伸缩。尽管负载变化时,定子和转子磁极轴线之间的夹角δ会变大或变小,但只要负载不超过一定的限度,转子就始终跟着定子旋转磁场以同步转速n1旋转。
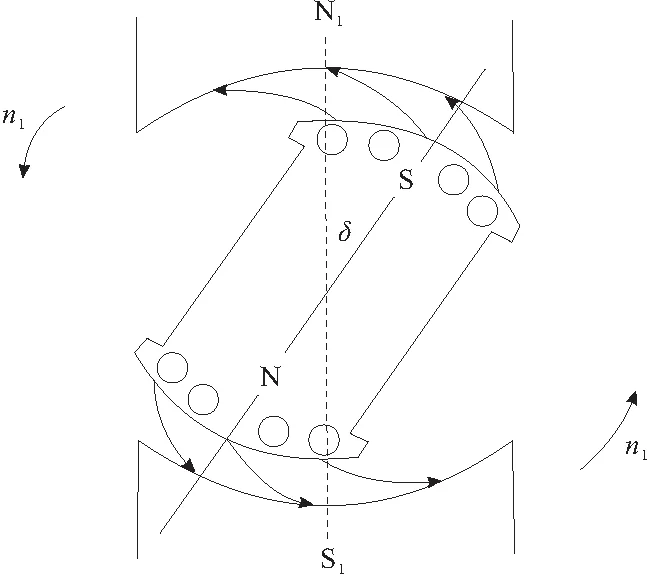
图1 永磁同步电机工作原理
永磁同步电机的空间矢量如图2 所示,永磁同步电机的输出力矩为:
Is为三相电流合成矢量;Ψf为永磁体产生的磁场在绕组中产生的磁链矢量;E0为空载电动势;β为电流Is超前永磁体磁链Ψf的角度。
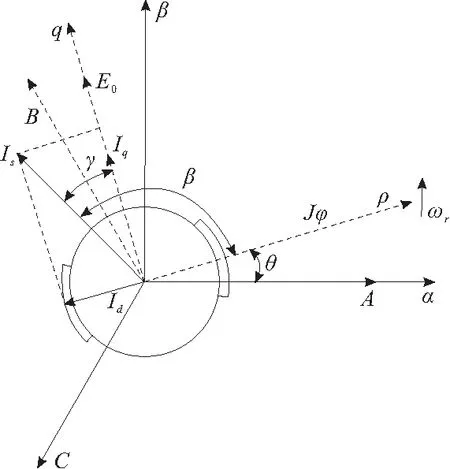
图2 永磁同步电机空间矢量
对于直流电机而言,磁链矢量和电流矢量是相互正交的,通过控制电流矢量的大小就可以控制电机的力矩输出大小,从而达到电机调速的目的。对于永磁同步电机而言,在同步电机中励磁磁场和电枢磁通势的空间角度β不是固定的,它随着负载的变化而变化,这将引起磁场间复杂的作用关系。因此,不能简单地通过调节电枢电流来直接控制电磁转矩。
2 矢量控制
矢量控制的基本原理是将电机的电流矢量分解成直轴电流矢量和交轴电流矢量分别加以控制。具体是通过坐标变换完成的。
通过CLARK变换,将三相静止坐标系下的变量转换成两相静止坐标系下的变量。
变换矩阵为:
iα,iβ为两相静止坐标系下的电流矢量;iA,iB,iC为三相静止坐标系下的电流矢量。
通过PARK变换,将将两相静止坐标系下的变量转换成两相旋转坐标系下的变量。变换矩阵为:
id,iq为两相旋转坐标系下的电流矢量;θ为电机旋转的电角度。
至此实现了三相静止坐标到两相旋转坐标的转换。其意义在于通过坐标变换实现了电机的三相交变电流到两相相互解耦的直流电流控制。这样就可以模仿直流电机分别对励磁电流(id)和转矩电流(iq)进行控制,从而降低了控制的难度。
3 系统组成和系统设计
随着微电子技术和功率电子技术的飞速发展,伺服控制器从模拟控制转向数字控制,而数字控制在精度、可靠性以及灵活性等方面的优势,促进了交流伺服系统的快速发展。系统为全数字控制系统,其组成框图如图3所示。
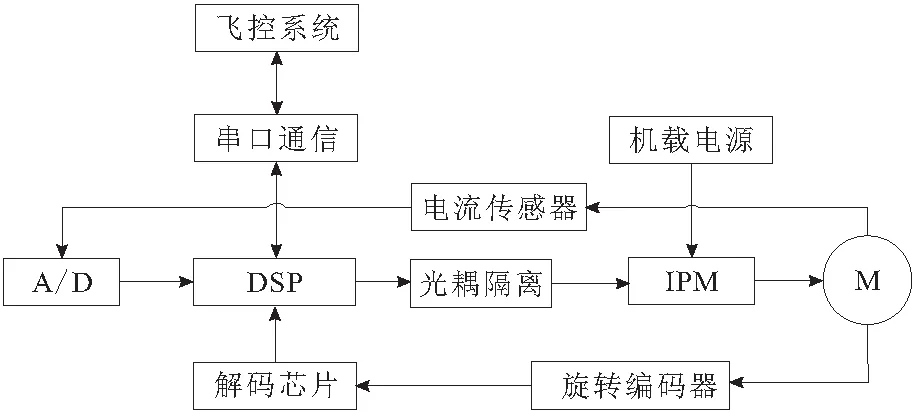
图3 控制系统
3.1 主控电路
选用美国德州仪器公司生产的TM S320F28335芯片作为主控单元。它具有以下优点:①主频150MHz 32 位内核,单精度浮点运算单元,运算速度很好地满足了新一代飞控机对数据处理速度的要求;②片上集成256 k字节的闪存,方便自启动,无需外部扩展,从而减小了控制系统的尺寸;③内带UART 以及增强的CAN 总线接口,方便与不同上位机协议通信的硬件设计,系统将采集好的数据通过UART上传给飞控机;④内含丰富的中断源, 能够及时处理各种突发事件,提高了系统的可靠性,同时也便于以后的升级。
3.2 电流及速度采集电路
电流及速度采集电路采用AD公司的A/D转换芯片AD7864,它的转换模拟输入电压为±5 V,或±10V,输出数据位为12位。AD7864的开始转换引脚CONVST和DSP的/ADCSOCAon引脚相连,通过配置DSP的PWM周期寄存器,在每个PWM周期开始的时候进行A/D转换,将AD7864的BUSY引脚和DSP的IO32~IO63中的任意一个IO口相连,当模数转换完成后,可以使DSP产生外部中断,进入中断程序进行处理。
3.3 磁阻电流传感器
采用电流传感器为CSNX25,是磁阻型电流传感器,电流测量范围为0~±56 A,电流飘移<30μA,传感器响应时间<200μs。
3.4 IPM模块
采用的智能功率模块是美国MSK公司的MSK4301,其内部为三相全桥电路,最高可以承受75 V的直流电压,最大的输出电流为29 A,最高的PWM斩波频率为100kHz。同时为了安全考虑,模块还有过流保护,输出使能保护等功能。
3.5 旋转变压器解码电路
旋转变压器解码芯片采用AD公司的AD2s80,具有16位数据输出,分辨率可以达到0.005°,最大跟踪速率为62 400r/min。
4 系统软件设计
系统的软件设计是控制系统的重要组成部分, 合理组织系统软件结构可提高可读性、可移植性、可扩展性以及可靠性等。系统采用C 语言按模块化编写软件, 主要包括通信模块、位置信息采集与处理模块、电流信息采集与处理模块、控制算法模块以及故障检测模块。主程序是个循环体完成各种初始化、接收飞控系统指令以及故障检测。中断由CPU 定时器0每200μs 产生一次, 中断程序完成数据的采集处理, 控制算法的实现。采用位置、速度和电流三闭环全数字控制, 其优点是调试方便, 控制策略改动容易。考虑到飞控机的控制周期短, 控制算法不应消耗大量时间。对电流环和速度环仅作限流和限速。位置环作为外环, 决定了伺服系统的稳态性能, 采用PID。系统的中断程序流程图如图4所示。
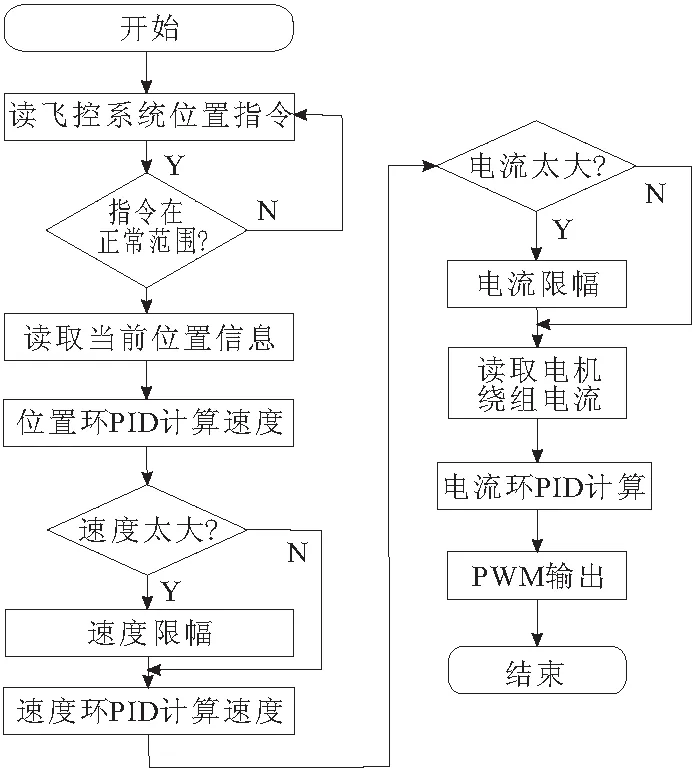
图4 系统软件流程
5 实验测试
在实验测试中,分别采用相同功率等级的直流有刷电机和永磁同步电机的伺服系统进行机载实验测试。在实验中稳定平台的稳定角度同为10°,图5和图6分别是直流电机伺服系统和永磁同步电机伺服系统的指向误差采集数据。采用直流电机的伺服系统,稳定精度为0.1°(RMS),而采用永磁同步电机的伺服系统,稳定精度为0.03°(RMS)。从实验结果中可以看出,永磁同步电机由于没有电刷干扰力矩的影响,在低速定点的过程中,指向精度要比有刷电机的指向精度高一些。
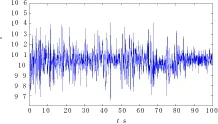
图5 直流电机伺服系统指向精度测试
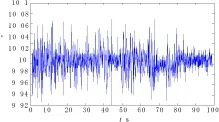
图6 永磁同步电机伺服系统指向精度测试
6 结束语
研究了基于永磁同步电机的航空稳定平台伺服系统的原理和实现。基于永磁同步电机的伺服系统可以解决直流有刷电机容易产生电火花,使用寿命短、存在干扰力矩等问题。建立了基于高性能DSP+IPM的交流伺服控制系统,并在相同的航空稳定平台中对直流伺服系统和交流伺服系统进行对比,测试实验结果表明,交流伺服系统不存在机械换向结构造成的干扰力矩,在低速情况下比直流电机伺服系统的定位精度高。
[1] 刘樾,5DOF运动仿真试验器的姿态指向对准和误差分析[J].精密测试.2012(2):17-23.
[2] 胡发焕,邱小童,蔡咸健.基于场效应管的大功率直流电机驱动电路设计[J].电机与控制应用,2011,38 ( 4):21-24.
[3] 赵轩,韩毅,秦绪鑫,等.基于 PWM 控制的模型车用小型直流电机调速装置[J].计算机工程与设计,2009,30(21):4884-4887.
[4] 刘贵如,王陆林.BTN7970在直流电机驱动系统中的应用[J].单片机与嵌入式系统应用,2010(8):44-46.
[5] 胡发焕,杨杰,邱小童.大功率直流电机驱动电路的设计[J].机械与电子,2009(10):77-80.
Designing the Airborne Stabilization Platform Based on the PMSM Servo System
CHANGJiujian,NITianrong
(China Electronics Techology Group Gorporation No.38 Research Institute,Hefei 230088,China)
The brush DC motor was widely used on the airborne stabilization platform. But due to the brush of the motor, the frost on the brush will stop the motor when the temperature is below zero, and due to the brush, this kind of motor can't meet the long work time of airborne stabilization platform. Compare with the brush DC motor, the permanent magnet synchronou motor(PMSM) can avoid these problems. In this paper, the PMSM servo system for the airborne stabilization platform was studied, and the results show that, the PMSM servo system can meet the requirment of the airborne stabilization platform.
radar structure;maintenance difficulty;virtual maintenance;interactive evaluation
2014-05-12
TN957;TN273.3
A
1001-2257(2014)11-0038-04
常九健男,(1984-),河北张家口人,工程师,研究方向为雷达伺服控制;倪田荣男,(1976-),四川内江人,高级工程师,研究方向为航空稳定平台伺服控制。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
测控技术(2018年12期)2018-11-25 09:37:44
电镀与环保(2018年1期)2018-04-04 05:21:18
电子制作(2017年1期)2017-05-17 03:54:12
电镀与环保(2016年3期)2017-01-20 08:15:28
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
电机与控制应用(2015年1期)2015-03-01 03:49:10