MEMS陀螺零偏误差补偿方法研究
2014-09-06 10:56:09,,,
机械与电子 2014年11期
,, ,
(沈阳理工大学兵器科学技术研究中心,辽宁 沈阳 110159)
MEMS陀螺零偏误差补偿方法研究
程阳,刘凤丽,王磊,郝永平
(沈阳理工大学兵器科学技术研究中心,辽宁 沈阳 110159)
在高动态、恶劣温度环境下,MEMS陀螺仪零偏不仅受温度变化的影响,同时还受线、角运动等影响,其真实误差是所有因素耦合的结果。针对MEMS陀螺零偏温度和转速非线性耦合误差补偿问题,根据径向基(RBF)神经网络原理,提出了一种新的零偏误差补偿方法,并利用一种隐式结构MIMU对补偿效果进行比较,验证了采用RBF神经网络对低精度MEMS陀螺零偏误差补偿的有效性。
MEMS陀螺零偏;非线性;神经网络;误差补偿
0 引言
微惯性测量组合是对六维惯性参量进行集成的微型惯性测量组合,因具有结构坚固、体积小、重量轻、能耗低和响应速度快等优点,已成为常规武器智能化和实现自寻的关键,也是新型战术武器,防空反导武器中必不可少的指导惯性部件[1]。MEMS陀螺用来测量角速度信息,可通过坐标变换矩阵得到被测体的姿态信息。它由单晶硅片采用光刻和各向异性刻蚀工艺制造而成。作为MIMU的核心部件,MEMS陀螺仪表头的尺寸结构、材料的弹性模量以及陀螺检测电路中电子器件的性能都会随环境的改变而变化,进而影响其工作的精度和稳定度,这将直接关系到其在商业以及军事领域的应用。MEMS陀螺零偏是影响其精度的主要因素,减小零偏输出误差,是微惯性器件标定与补偿技术的关键[2]。
1 MEMS陀螺零偏误差分析
硅MEMS陀螺零偏误差包括线性成分和非线性成分[3],建立陀螺仪的静态零偏温度误差模型为:
Gs=kb1ΔT+kb2ΔT2+εt
(1)
ΔT为温度变化量;kb1和kb2分别为静态零偏温度误差模型中的一次项和二次项拟合系数;εt为陀螺仪随机温度误差。温度变化过程中陀螺仪表头质心发生偏移,从而引起比力及角加速度干扰力矩,使陀螺仪输出发生漂移。MEMS陀螺仪由于比力与温度耦合引起的动态温度误差为:

(2)

Gte=Gd+Gs

(3)
实验通常采用六位置正反转标定方法,根据MIMU数学误差模型及基于该模型的单轴速率转台精确标定,分析MEMS陀螺仪零位漂移。由实测值与误差模型,采用对称位置及正反转误差相消法,标定陀螺零偏。 由MEMS陀螺仪的标定结果可知,零偏b0随温度T与Ω转速成非线性变化,特别是在低输入转速区间尤为严重,以实验室自制低成本MIMUX轴陀螺零偏为例,实验结果与理论分析的结果一致,如图1所示。考虑到在不同环境下零偏值的强非线性特点,提出基于RBF神经网络的MEMS陀螺零偏误差补偿新方法。
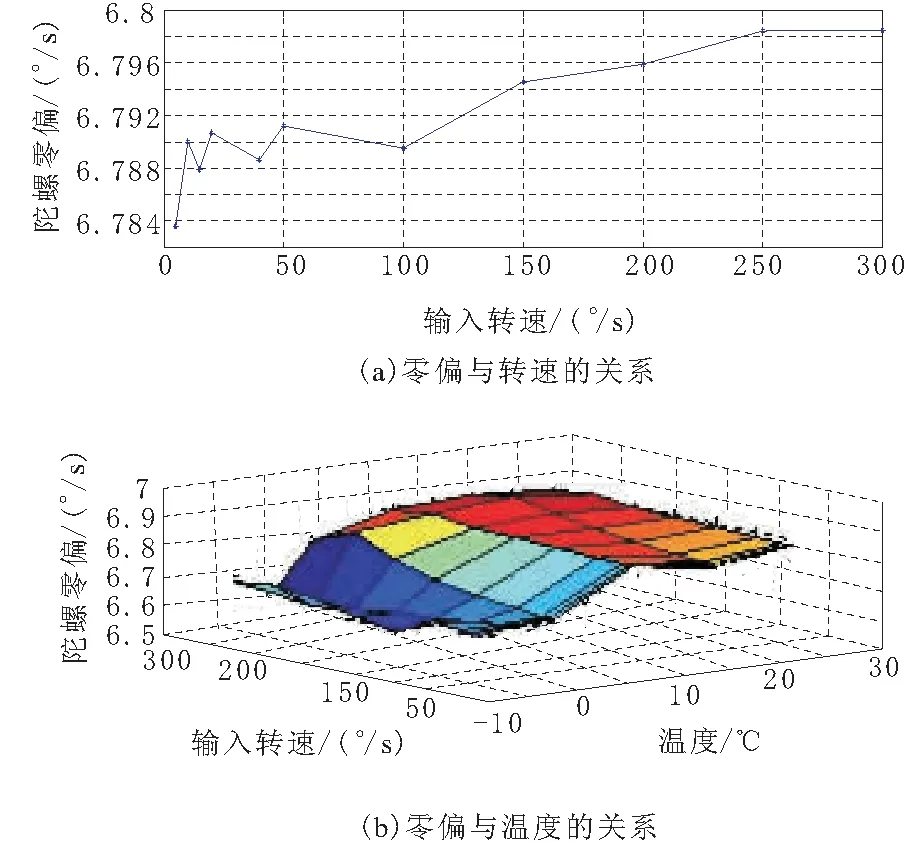
图1 零偏与转速和温度的关系
2 RBF神经网络的误差补偿方法
2.1 RBF神经网络方法的提出
RBF神经网络是一种局部逼近前向网络,结构如图2所示。网络最显著的特点是隐节点采用输入模式与中心向量的距离作为函数的自变量,并使用径向基函数(常选用高斯函数)作为激活函数[4]。采用高斯函数可对输入信号产生局部响应,当输入信号靠近基函数的中央范围时,隐层节点将产生较大的输出[5]。基于该特点,RBF网络可以任意精度逼近任意连续函数,故将其应用于MEMS陀螺零偏非线性误差补偿问题。
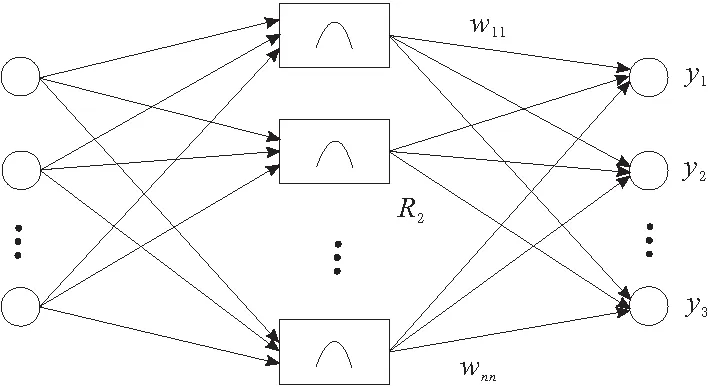
图2 径向基神经网络结构
2.2 RBF神经网络的学习算法
为较少隐含层节点数量,保证补偿网络的泛化能力和实时性,针对MEMS陀螺零偏样本数据的特点,采用输入输出均值聚类算法进行初始参数的优化选取。径向基神经网络的激活函数表示为:
(4)
‖xp-ci‖为欧式泛数;ci为高斯函数的中心;σ为高斯函数的方差。由径向基神经网络的结构可得到网络的输出为:
(5)

设d为样本的期望输出值,那么基函数的方差可表示为:
(6)
RBF训练过程首先从1个神经元开始,通过对比输出误差,使网络每次自动增加神经元个数。每次循环,是网络产生最大误差所对应的输入向量作为权值向量w1i,产生一个隐含层神经元,然后对比新网络误差,直到误差达到要求。训练完成后便得RBF神经网络Net1的最终权值w1i,w2i和阈值b1i。
2.3 RBF神经网络的设计
根据带温箱单轴转台标定实验,由误差模型与实测值得出MEMS陀螺在各设定温度与转速下一组准确零偏值。设计RBF神经网络Net1,MEMS陀螺温度T和转台设定转速Ω作为输入向量,对应各零偏值B作为输出;隐含层激励函数采用高斯函数,隐含层每个神经元的输入层相连的权值向量和输入向量之间的距离乘以阈值作为本身的输入;输出层是对线性层进行调整,激励函数为纯线性函数。将标定数据作为训练样本,设定相应的基函数宽度、收敛精度和节点数等约束条件,进行样本训练。
通过MEMS陀螺标定实验测出各温度点T,不同转速Ω对应的陀螺零偏B,令X=[TΩ]T为网络输入向量,Y=B为网络输出。权值向量W1i=[w1iw2i]和输入向量X之间的乘上阈值b1i作为本身的输入,则隐含层第i个神经元的输入ki和输出ri分别为:
(7)
(8)
σi为扩展常数,反映输出对输入的响应宽度。输出层的输入为隐含层神经元输出ri的加权求和,将激励函数为线性函数。因此,网络Net1输出为:
(9)
N为隐层神经元的数量。将式(7)和式(8)代入式(9),可得:
=B
(10)
由以上分析可知,训练后得的神经网络Net1是包含温度误差项系数和转速误差项的零偏值B。
3 零偏误差补偿实验
3.1 实验过程
实验设备采用920ET带温箱单轴位置速率转台,如图3a所示,高低温环境箱温度范围为-70℃~+100℃,升降温速率为±2 ℃/min;单轴速率转台速率分辨力为0.0001 °/s,回转精度为±2″。实验室自制低成本MIMU由3个ADXS342型MEMS陀螺仪和3个MS9030单轴加速度计组成,如图3b所示。在MIMU额定范围内选取几组不同温度与转速分别进行测试,得出MEMS陀螺各误差系数,代入误差模型求得实际误差值。

图3 MIMU动态温度实验
实验在低转速范围内选取±2 °/s,±5 °/s,±10°/s,±20°/s, ±50°/s,在100~300°/s范围内每间隔50°/s作为一组测试值进行标定。
将结果采用提出的新方法对网络进行创建,并将要标定验证数据作为样本值,代入RBF神经网络进行训练。任取某一温度与转速下,标定陀螺零偏值并对补偿结果进行比较,验证误差补偿效果。
3.2 验证结果
将实验所选定的温度T与转速值Ω对应,作为RBF神经网络的输入进行训练,再将训练所得零偏值重新代入陀螺误差模型,计算得出补偿后X轴陀螺误差补偿效果,结果如图4所示。重复上述实验步骤,即可得到MIMU的Y轴陀螺和Z轴陀螺的神经网络及准确零偏值,补偿结果如表1所示。
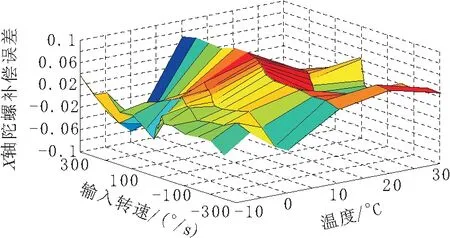
图4 X轴陀螺补偿后误差
表1 MEMS陀螺补偿误差结果对比°/s
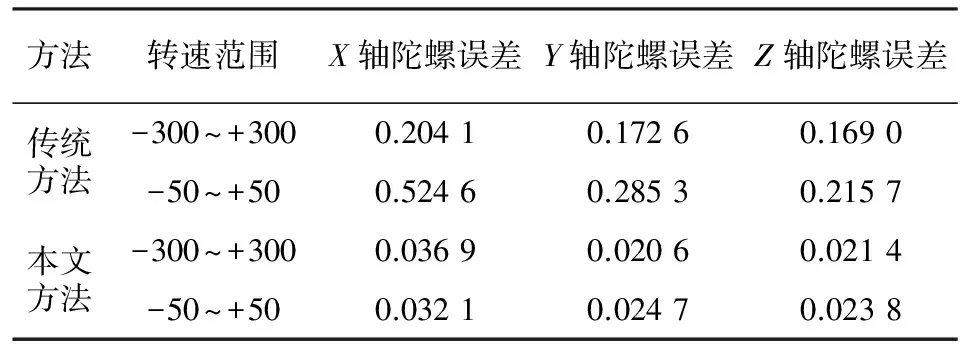
方法转速范围X轴陀螺误差Y轴陀螺误差Z轴陀螺误差传统方法-300~+3000.20410.17260.1690-50~+500.52460.28530.2157本文方法-300~+3000.03690.02060.0214-50~+500.03210.02470.0238
实验数据表明,对于MEMS陀螺,传统标定补偿方法精度较差,特别是在-50~+50°/s的低输入转速区间,由于零偏的非线性严重导致补偿精度偏低。经实验证明,采用提出的RBF神经网络进行训练,使得不同环境下陀螺零偏值更加准确,经过补偿提高了MEMS陀螺动态输出精度,且全范围误差精度一致性非常好。
4 结束语
基于MEMS陀螺的零偏随温度和转速呈非线性变化的特点,分析了零偏漂移的影响因素,提出RBF神经网络训练零偏值的标定方法。试验结果表明,陀螺零偏是影响惯性器件动态误差的主要原因之一,利用RBF神经网络可准确得出任意环境下陀螺零偏值,代入误差模型求解,补偿效果明显优于常规补偿方法,既验证了MEMS陀螺零偏误差分析的正确性,又证明了RBF神经网络训练补偿的准确性和实用性。
[1] 刘俊,石云波,李杰.微观性技术[M].北京:电子工业出版社,2005.
[2] 程龙,王寿荣,叶甫.硅微机械振动陀螺零偏温度补偿研究[J].传感技术学报 ,2008(3):115-117.
[3] 全伟,刘百奇,宫晓琳,等.惯性/天文/文星/组合导航技术[M].北京:国防工业出版社,2011.
[4] 韩力群.人工神经网络教程[M].北京:北京邮电大学出版社,2006.
[5] Fei Juntao,Ding Hongfei,Yang Yuzheng,et al.Neural network sliding mode control of MEMS triaxial gyroscope based on RBF sliding gain adjustment[C]//Chinese Control Conference,2012:1345-1350
Research on Bias Error Compensating Method for MEMS Gryo
CHENGYang,LIUFengli,WANGLei,HAOYongping
(Center of Microsystem Technology,Shenyang Ligong University,Shenyang 110159,China)
In the highly dynamic,temperature environments,the bias of MEMS gyroscope is not only affected by temperature change,but also affected lines,angular movement,with its real error is the result of all these factors coupled.Aiming MEMS gyro bias temperature and speed nonlinear coupling error compensation,according to the radial basis (RBF) neural network theory,we propose a new bias error compensation method,and using an implicit structure of the compensation effect MIMU compare the validity RBF neural network for low-precision MEMS gyro bias error compensation.
bias of MEMS gyroscope;nonlinear;neural network;error compensation
2014-05-22
TP183
A
1001-2257(2014)11-0027-03
程阳(1989-),女,山西晋中人,硕士研究生,研究方向为机械系统自动控制技术;刘凤丽(1975-),女,辽宁朝阳人,副教授,研究方向为MEMS传感器与执行器的设计、结构与可靠性分析。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
汽车维修与保养(2020年11期)2020-06-09 05:42:16
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
山东工业技术(2016年15期)2016-12-01 05:32:01
光学精密工程(2016年3期)2016-11-07 09:03:34