自主型草地修整机器人六向碰撞检测安装架的创新设计
2014-09-06 01:19:13刘宁发周骥平高龙琴柯钟煜
机械设计与制造工程 2014年11期
刘宁发,周骥平,高龙琴,柯钟煜
(1.扬州大学 机械工程学院,江苏 扬州 225127)(2.扬州维邦园林机械有限公司,江苏 扬州 225127)
自主型草地修整机器人六向碰撞检测安装架的创新设计
刘宁发1,周骥平1,高龙琴1,柯钟煜2
(1.扬州大学 机械工程学院,江苏 扬州 225127)(2.扬州维邦园林机械有限公司,江苏 扬州 225127)
为提高草地修整机器人工作的安全性能,避免检测碰撞的压力开关分布散、安装繁琐的弊端,在利用了球关节连接自由度高和弹簧力复位特性的基础上,创新设计了一款集6个方向碰撞检测于一体的压力开关安装架,使得草地修整机器人的整体结构更加紧凑,不仅节约了生产成本,还提高了市场竞争力。
草地修整机器人;碰撞检测;安装架;六向运动;弹簧力
随着经济的发展和人们生活水平的不断提高,城市绿化迅猛发展,新增了大量的公园草坪、社区绿地、道路绿化等公共绿地,用于草坪维护的机械也随之得到了较快的发展,其中可大幅度降低草坪维护作业劳动强度的自动化草坪机械更是大量涌现。为确保草地修整机器人的使用安全,除了要有大量的避障和导航设备外,还要求安装碰撞检测装置,当草地修整机器人发生碰撞时,使切割装置(刀片)能够实现快速制动,并且机器人能根据碰撞位置自动进行路径修正。
1 与传统设计的比较
检测碰撞主要基于形状、压力、能量等的改变来实现,考虑到成本和方便应用等因素,目前草地修整机器人主要还是运用压力开关检测碰撞。传统的方法是将压力开关分布于草地修整机器人车体的四周[1],采用单独固定安装的方式,用于检测前后左右四向的碰撞。本文设计了一种新型的六向碰撞检测压力开关安装架,使压力开关都集中在此装置内,不仅可以方便检测前后左右的碰撞,还能检测来自草地修整机器人纵向的碰撞。
2 结构设计与工作原理
2.1草地修整机器人总体结构
草地修整机器人整体主要由控制模块1、驱动模块2、传感模块3和割草模块4等组成,如图1所示[2]。其压力开关安装架属于传感模块的一部分,它同时也起着连接外壳和车体的作用。
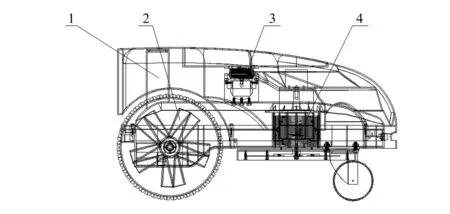
1—控制模块;2—驱动模块;3—压力开关安装架(传感模块);4—割草模块
2.2压力开关安装架的结构设计
压力开关安装架的外形是一个φ120mm×90mm的圆柱体,主要由底座、万向转动块、上下移动滑杆和弹簧等几部分组成,结构紧凑,拆装方便[3],如图2所示。为了方便检测各个方向的碰撞,万向转动块一端设计成球形结构,与底座形成球关节连接来完成横向运动;同时万向转动块还巧妙地设计成空心结构,可以使上下移动滑杆在万向转动块内部上下滑动完成纵向运动。

1,5,8—螺纹链接孔;2—上连接板;3—下压弹簧;4—提升检测压力开关;6—碰撞检测压力开关;7—底座;9—万向转动块;10—侧压弹簧;11—提升弹簧;12—提升挡板;13—上下移动滑杆;14—下压检测压力开关
2.3工作原理
压力开关安装架的底座7通过螺纹孔连接固定在草地修整机器人车体上,上连接板2与草地修整机器人外壳相连,起到连接外壳与车体的作用,如图1所示。草地修整机器人的外壳与车体四周存在2cm左右的空隙,外壳可以自由运动。因为外壳仅仅通过压力开关安装架与车体连接,所以外壳的运动就会传递到压力开关安装架上。压力开关安装架中的万向转动块9与底座7之间是球形连接,当草地修整机器人前面受到撞击时,外壳相对于车体往后移动的同时带动压力开关安装架中的万向转动块9同步运动,万向转动块9就会触发安装在底座7侧壁的压力开关6,起到碰撞检测的作用,当碰撞结束后通过侧压弹簧10使外壳复位。后面和侧面碰撞时原理一样。当压下外壳时,上下移动滑杆13下行,下压检测压力开关14被触发,压力移除时在下压弹簧3的作用下外壳复位,这个功能可以作为草地修整机器人的急停开关。当草地修整机器人被人通过外壳提起时,万向转动块9在上下移动滑杆13的带动下上行,触发提升压力开关4,当草地修整机器人被放下时,外壳在提升弹簧11的作用下复位。
提升弹簧和下压弹簧与提升挡板之间有限位槽,与万向转动块和上连接板之间是平面接触,保证万向转动块侧向运动时,提升弹簧和下压弹簧不会发生弯曲变形。
3 弹簧的设计
压力开关安装架结构设计的关键是3种弹簧的设计[4]。因为根据压力开关安装架的功能要求,草地修整机器人正常工作时,万向转动块和上下移动滑杆是不允许产生位移的,以防止因草地修整机器人工作震动带来的微小扰动而引起误报警,这些弹簧在安装时都有一定的预压缩量,以对压力开关安装架的内部零件起到一定的支撑作用。在受到碰撞时,要及时克服弹簧阻力触碰压力开关发出报警,这就需要对弹簧进行合理的设计。
3.1下压弹簧
下压弹簧对草地修整机器人的外壳起着支撑作用,既要保证机器人工作时外壳的稳定性,还要确保紧急情况下按下外壳急停开关能成功触发,对弹簧力的大小以及弹簧预压缩量要进行精确的计算。设:P1min为下压弹簧最小工作载荷(根据使用要求估算);P1max为下压弹簧最大工作载荷(根据使用要求估算);h1为下压弹簧工作行程(根据结构要求选取)。初算下压弹簧刚度
设G为弹簧钢弹性模量 (按文献[4]表取热轧弹簧钢材料弹性模量G=79GPa);D1为下压弹簧的中径(先按结构要求估计,然后按表取标准值);n1为下压弹簧有效圈数(根据结构要求按表取标准值);d1为下压弹簧的钢丝直径。则下压弹簧刚度
根据取值代入公式求得d1=2.08mm,按表取标准值d1=2mm。
设fj1为下压弹簧工作极限载荷下的单圈变形量(查表fj1=3.676mm),则下压弹簧的节距
t1=fj1+d1=5.676(mm)
下压弹簧自由高度H01=n1t1+1.5d1=31.38mm,按表取标准值H01=32mm。
3.2提升弹簧
万向转动块通过提升弹簧产生的压力与底座球面形成球形连接,压力的大小直接关系到万向转动块运动的灵敏度,既要保证草地修整机器人正常工作时万向转动块运动的可靠性,又要确保抬起外壳时上下移动滑杆能带动万向转动块克服弹簧力的作用向上移动。设:R1为小端圈半径(根据结构要求设计);R2为大端圈半径(根据结构要求设计);n2为提升弹簧有效圈数(根据结构要求按表取标准值);Fc为大端圈开始触合时的变形(根据结构要求估算)。
式中:Pc为大端圈开始触合时的载荷(根据使用要求估算);d2为提升弹簧的钢丝直径。又由
可得提升弹簧自由高度
则提升弹簧的节距t2=(H02-d2)/n2=4.667mm。
3.3侧压弹簧

求得d3=0.767mm,按表取标准值d3=0.8mm。
设fj3为工作极限载荷下的单圈变形量(查表fj3=2.098mm),则侧压弹簧的节距
t3=fj3+d3=2.898(mm)
侧压弹簧自由高度H03=n3t3+1.5d3=30.18mm,按表取标准值H03=30mm。
4 结束语
文中设计的六向碰撞检测开关安装架主要利用草地修整机器人外壳的运动带动其内部结构的运动,从而迅速触发相应的压力开关,达到碰撞检测的目的,并能通过弹簧力的作用使碰撞后的草地修整机器人外壳复位。此安装架不仅可以安装在草地修整机器人上,稍加改造还可以应用于大多数自主移动机器人。但是,目前的研究工作仅通过较为简单的实验验证了其工作的可行性,要真正在实践中体现其价值,还需要更多的相关试验支撑或根据试验结论进行改进。
[1] 李文飞.电动四轮割草机设计与研究[D].苏州:苏州大学,2012:43-46.
[2] 戴福国,徐兴江.电动割草机综合检测装置设计[J].机械工程师,2005,32(1):29-32.
[3] 高良凤,胡伟蓉,何向东.开设创新设计性实验的实践与探索[J].中国现代教育装备,2008,18(7):12-16.
[4] 秦大同.弹簧设计[M].北京:化学工业出版社,2013:30-33.
Creativedesignonthesixdirectioncollisiondetectionmountingbracketofthelawntrimmingrobot
LIU Ningfa1,ZHOU Jiping1,GAO Longqin1,KE Zhongyu2
(1.Yangzhou University, Jiangsu Yangzhou, 225127, China)(2.Yangzhou Weibang Outdoor Power Equipment Ltd. Co., Jiangsu Yangzhou, 225127, China)
Security is the premise of lawn trimming robot's work. How to detect the collision is the key problem of the lawn trimming robot's safety. In order to avoid the scattered distribution and complicated installation of the collision detection pressure switch, this paper innovatively designs a set of pressure switch mounting bracket in the integration of six direction collision detection. This method can save the production cost of lawn trimming robot and improve the market competitiveness.
lawn trimming robot; collision detection; mounting bracket; six direction movement; spring force
10.3969/j.issn.2095-509X.2014.11.006
2014-10-28
扬州市-扬州大学科技合作资金计划项目(C×201210006)
刘宁发(1988—),男,江苏泰州人,扬州大学硕士研究生,主要研究方向为机电一体化。
TH22
A
2095-509X(2014)11-0025-03
猜你喜欢
安徽冶金科技职业学院学报(2023年1期)2023-08-15 07:32:38
汽车工程师(2021年12期)2022-01-17 02:29:44
橡塑技术与装备(2021年7期)2021-04-22 15:55:06
装备制造技术(2020年2期)2020-12-14 03:09:48
壹读(2020年1期)2020-12-08 17:04:34
铁道通信信号(2020年10期)2020-02-07 01:01:12
金属加工(热加工)(2020年12期)2020-02-06 05:59:18
汽车与新动力(2019年4期)2019-09-18 01:43:22
电子测试(2018年1期)2018-04-18 11:53:00
中国科技产业(2016年2期)2016-02-09 07:56:35