
液压卸货平台的运动仿真及可视化
2014-09-05 08:04:53李锐,陈晖
机械设计与制造工程 2014年7期
李 锐,陈 晖
(中国空空导弹研究院,河南 洛阳 471099)
液压卸货平台的运动仿真及可视化
李 锐,陈 晖
(中国空空导弹研究院,河南 洛阳 471099)
为了在实际制造之前对液压卸货平台进行仿真验证,提出并实现了一种单叉液压卸货平台的运动学仿真和可视化的方法,即利用CAD模型、约束关系、运动学分析数据,综合使用UG、MAYA、RTT等多种工具相互配合实现复杂机构的运动仿真。仿真结果显示设计方案满足功能要求。
运动仿真;可视化;实时渲染
随着以计算机为核心的信息技术的不断发展,在当今的制造业中,计算机仿真在产品开发过程中的作用越来越重要,计算机仿真已广泛应用于产品研制全生命周期的各个阶段。仿真及可视化技术是指基于数学模型、结构设计模型,利用计算机对系统的结构、功能、行为、控制等方面进行高保真的模拟试验,以验证方案设想,并把试验结果数据以可视化图形的方式显示出来的综合技术。仿真及可视化技术已经是产品设计验证的重要手段,它使得产品可以在实际制造之前就能进行虚拟验证,综合考虑方案的可行性、可制造性、可用性等方面的因素来优化设计方案。传统的液压卸货平台设计方法是通过试制卸货平台实物来验证设计方案,成本高、周期长,通过计算机仿真可以有效避免因初期设计不成熟而导致的资源浪费,并缩短研制周期。
1 液压卸货平台模型建立、运动仿真及可视化
1.1设计模型创建
液压卸货平台的用户需求和功能要求如下:(1)放货台平面最高能升至1.3m;(2)平台最大载荷300kg;(3)为配合货物箱底部尺寸,卸货台应达到的最大尺寸为1 150 mm×1 500mm;(4)设备需要的操作人员最多不超过3人。
首先根据用户的需求,该自动卸货平台采用常规的单叉机构升降重物的方式,使用两个同步液压缸做同步驱动,来达到升降货物的目的。
其次建立结构模型,其中结构设计使用NX6.0作为建模工具。图1所示为所建立的设计模型的侧视图。在仿真之前编辑并理清运动组建之间的关系是进行运动分析的前提条件,因此必须整理模型的结构树。各个组件的位置如图1所示,其中组件之间的关系是:液压缸一、液压缸二为主动件,其余运动部件为从动件。液压缸一、液压缸二作同步运动,通过各自的活塞杆伸缩带动连杆,连杆带动中心转轴,转轴驱动前后转动架围绕中心旋转,两组转动架旋转来升起放货平台;其中底座主要起支撑稳定作用,将转动架的作用力传递到地基上。
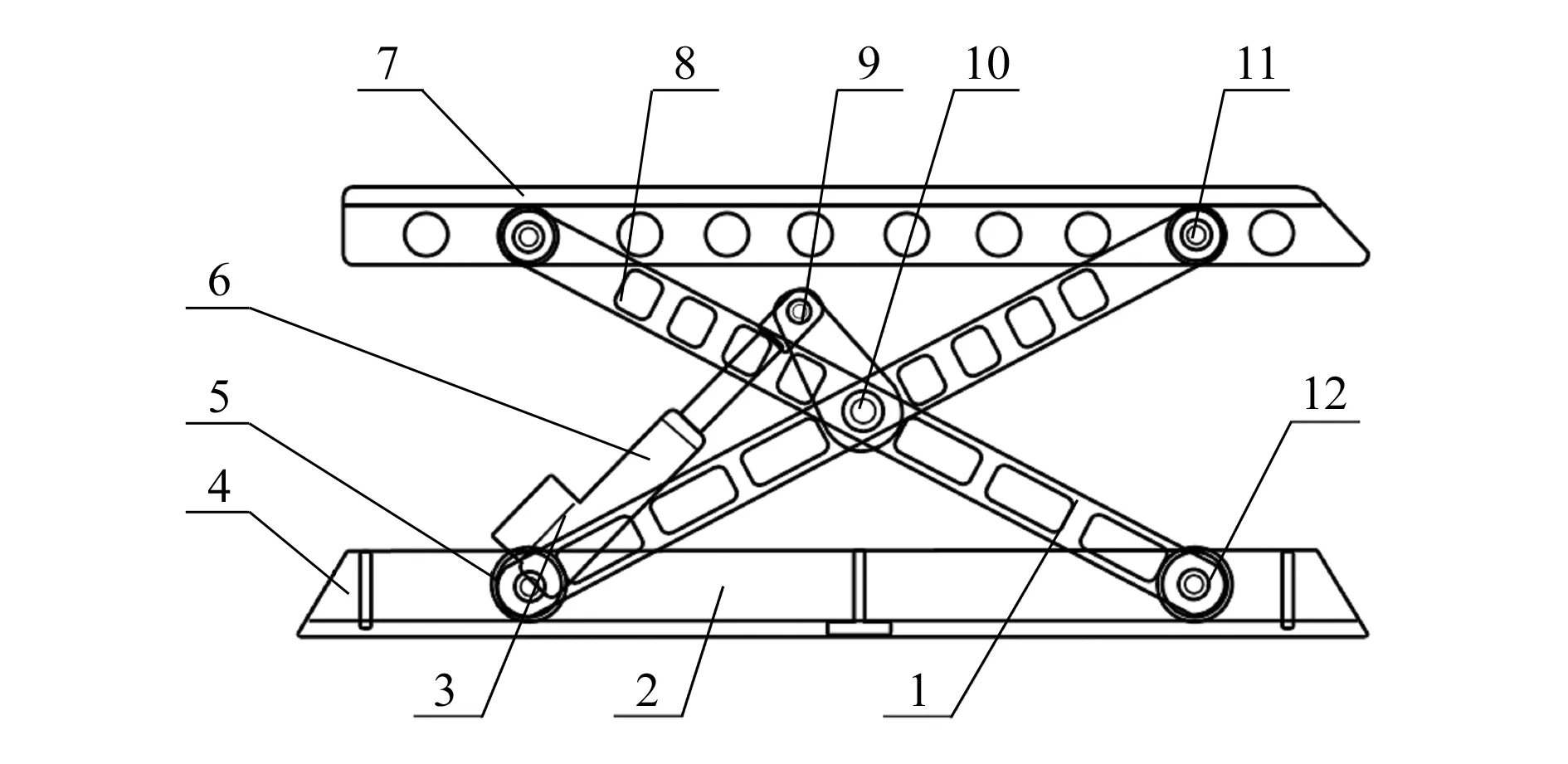
1—安装螺栓;2—滑轨;3—后转动架;4—底座;5—底座前滑块;6—液压缸一、液压缸二;7—放货台;8—前转动架;9—连杆一、连杆二;10—中心转轴;11—平台后滑块;12—底座后滑块
1.2运动学分析与仿真动画实现
1.2.1运动学分析
NX6.0软件可以通过模拟三维模型中液压缸的工作行程,驱动液压卸货平台中各个零件的运动。运动学分析的驱动参数为液压缸一、液压缸二的行程,关注的参数包括转动架水平方向夹角和转动角度、被升降货物的角度和高度、放货台最高点高度。
以液压卸货平台的初始位置为研究对象,开始进行运动学分析。初始状态时,液压缸一行程0,液压缸二行程0,转动架夹角15°,转动角度0°,放货平台的角度0°,放货台的最高点与底座下表面高度差为302mm,放货台最高点为1 354mm。当液压缸一运行活塞伸出时,此时液压卸货平台各零部件随动。当液压缸一运行600mm时,液压卸货平台顶部平面距离目标区域基本处于最近位置,两者间距16mm左右,上述运动过程中,液压卸货平台各零部件的运动学分析数据见表1。

表1 运动学分析数据
1.2.2仿真动画实现
考虑到卸货平台机构运动较复杂,且RTT支持MAYA动画数据,因此这里使用MAYA软件来制作产品仿真动画,再将制作的动画输出成WRL格式的结构化数据包,然后把WRL格式的数据包导入RTT来实现整个运动仿真的动画。
根据上一节运动分析结果创建机械结构之间的约束关系,其中液压缸一、液压缸二为驱动部件,带动连杆以及其他部件运动。在MAYA中按照如下步骤添加约束:(1)在底座上,分别在后转动架、连杆一的转动圆心位置创建Locator1,然后添加点约束关系,从而约束后转动架绕固定点Locator2做旋转运动。(2)用同样的方法在连杆一与液压缸一连接点圆心位置创建Locator3,用其来约束液压缸一的缸体的底部,使缸体的转动中心约束在连杆一的连接点。(3)在后转动架上为液压缸一的推杆添加一个点约束Locator4。在液压缸一的缸体上,为液压缸一的推杆添加一个方向约束,以同样的方法为液压缸一的缸体添加一个方向约束;后转动架带动放货台,进而带动整个平台向目标区域运动,同时后转动架驱动连杆二。(4)在后转动架的顶部与放货台的连接点圆心位置创建Locator5,建立点约束关系约束放货台的运动,圆心位置创建点约束Locator6,约束前转动架连接点。最终平台运送货物到达目标区域,放下货物,液压卸货平台自动返回初始位置,结束一个自动工作循环。(5)在后转动架上与连杆二连接点处圆心位置创建Locator7,用它来约束连杆二的运动。(6)在连杆二与前转动架的连接点处圆心位置创建Locator8,用它来约束前推架的运动。(7)在前转动架与放货台的连接点处圆心位置创建Locator9,用它来约束放货台的运动。
根据表1中的运动数据,确定液压缸一、液压缸二行程(0mm)、初始转动架夹角(15°)、平台最高点高度(1 354mm)等关键位置,在时间轴上依次制作关键帧动画。完成以后将动画导出为WRL格式运动数据。
1.3三维可视化(实时渲染)
产品三维可视化选用基于GPU的实时渲染技术[1],随着计算机硬件技术的快速发展,目前已经可以做到高保真的实时渲染。具体使用软件RTT来实现可视化渲染。RTT全称Real Time Technology,它是由德国慕尼黑的RTT公司研发的高端实时虚拟现实可视化软件。该款软件可以提供逼真的、基于物理真实的、实时的三维可视化。它能帮助产品设计、研发、装配、市场销售等各个环节提高工作流程的效率、节省时间,具有很强的灵活性。
可视化实现方法:(1)将卸货平台的UG模型导出为轻量化的JT格式,创建厂房地板和货物的其他模型。(2)按照仿真要求对模型结构树进行重新编辑,对模型进行轻量化处理,轻量化转化参数如图2所示。(3)选择整个场景的所有模型添加一个替代材质,创建主光源和辅助光源,计算阴影[1]。(4)从材质库中选取合适的材质。在RTT中导入MAYA软件输出的WRL运动数据,以驱动RTT中的轻量化模型。最后渲染输出成为交互式程序或动画,如图3所示。在有客户参加的设计评审中,客户从计算机最终输出的动画可以直观地看出设计方案能否满足要求。
2 三维可视化的应用
目前,制造业正在向着综合性的协同设计制造体系方向发展,一个关键环节就是如何协同。工程可视化利用三维模型把复杂的工程问题透明化、可视化,克服了不同专业之间的语言障碍[2],使得技术人员在产品开发的前期就能充分考虑影响产品使用的诸多因素。可视化分析已经成为一个重要的进行技术决策和分析的手段[3],使生产执行层、管理层、投资者、消费者能更易于理解设计方案和目的,便于将产品快速推向市场。

图2 模型的轻量化参数

图3 最终输出结果
基于工程模型的三维可视化可以有以下方面的业务应用:(1)交互式可视化模型可以用于设计验证和关键里程碑节点评审,工程可视化利用工程CAD模型,打破了各个专业之间的限制,使不同角色岗位的人员能够协同工作,综合分析工程技术问题。(2)在产品未投产之前,利用三维可视化模型进行展示,这种展示方式便于管理层、投资者接受理解,增加其对产品方案和承制方的信任。(3)在量产阶段,三维可视化动画可以作为工人的可视化作业指导书。(4)在使用维护保障阶段,用于制作交互式电子手册、技术出版物等。
3 结束语
基于液压卸货平台的CAD模型,利用UG 、MAYA 、RTT等专用工具相互配合完成产品方案的运动仿真及可视化,从仿真结果可以看出,卸货平台可以运动到指定的高度,可以放置用户要求的最大尺寸货物,并且整个运动过程无干涉现象和明显的设计缺陷。最后通过与用户沟通,用户提出了进一步优化的建议:是否可以在保证安全的前提下尽量缩短整个卸货的时间,采用无线控制,并且添加声音提示。这些要求将是下一步卸货平台设计方案改进、完善的主要内容。
[1] 登普斯基.DirectX实时渲染技术详解[M].于忠德,吴红艳,林锋,译.重庆:重庆大学出版社,2006.
[2] ESI中国.ESI虚拟样机技术及应用[M].北京:知识产权出版社,2010.
[3] 聂海涛.臭鼬工厂传奇[M].北京:中航出版传媒有限责任公司,2011.
TheMotionSimulationandVisualizationoftheHydraulicUnloadingPlatform
LI Rui, CHEN Hui
(China Air-to-air Missile Academy, Henan Luoyang, 471099, China)
In order to build the hydraulic unloading platform for simulation in the practice of production prior, it designs the kinematics simulation and visualization of a single fork hydraulic unloading platform. Based on the CAD model, constraint, kinematic analysis of data and UG, MAYA, RTT and other tools, it realizes the motion simulation of complex mechanism. The simulation results show that the design scheme meets the functional requirements.
Dynamic Simulation; Visualization; Real-time Rendering
10.3969/j.issn.2095-509X.2014.07.020
2014-05-21
李锐(1986—),男,陕西渭南人,中国空空导弹研究院助理工程师,主要研究方向为虚拟样机、工程可视化技术。
TP319
B
2095-509X(2014)07-0083-03
猜你喜欢
加油站服务指南(2021年4期)2021-07-21 02:29:22
冶金设备(2020年2期)2020-12-28 00:15:26
装备制造技术(2020年2期)2020-12-14 03:09:26
重型机械(2020年2期)2020-07-24 08:16:20
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
石油化工建设(2015年6期)2015-12-01 04:17:35
人生十六七(2015年6期)2015-02-28 13:08:38
机械工程师(2015年9期)2015-02-26 08:38:12
机械工程师(2015年10期)2015-02-02 01:14:36
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:13
