
汽车ABS/ASR/ESP集成控制策略研究
2014-09-05 06:34付燕荣王国业关志伟
机械设计与制造工程 2014年2期
付燕荣,王国业,关志伟
(1.天津职业技术师范大学 汽车与交通学院,天津 300222)(2.中国农业大学工学院 车辆与交通工程系,北京 100083)
汽车ABS/ASR/ESP集成控制策略研究
付燕荣1,王国业2,关志伟1
(1.天津职业技术师范大学 汽车与交通学院,天津 300222)(2.中国农业大学工学院 车辆与交通工程系,北京 100083)
在对整车及轮胎受力分析的基础上,基于某轿车建立了9自由度整车动力学模型、发动机模型、车轮模型、传动系模型等,根据仿真模型和车辆系统动力学知识对汽车ABS/ASR/ESP集成控制系统中各子系统的触发条件进行了研究,并对ABS/ASR/ESP集成控制策略进行了探讨,确定了集成控制系统在制动工况和驱动工况下统一的控制策略。在MATLAB/Simulink环境下实现车辆ABS/ASR/ESP的集成控制,并通过各个工况的仿真验证了集成控制策略的有效性和集成控制的优势。
动力学模型;ABS/ASR/ESP;集成控制;仿真
随着汽车的行驶稳定性和安全性越来越被人们所重视,汽车ABS得到了广泛的应用,ESP(Electronic Stability Program)技术经过研究与实践,也被证明是当前有效解决汽车操作稳定性的主动安全技术之一。目前,国内外学者对汽车ABS、ASR及ESP进行了广泛的研究,但将三者结合起来,对汽车ABS/ASR/ESP的集成控制研究还比较少。随着汽车底盘动力学控制的不断发展,集成控制是今后的发展方向。作为第一步,把汽车主动安全控制装置ABS、ASR和ESP在结构和功能上集成在一起,形成汽车ABS/ASR/ESP集成控制系统,较易实现,且能为汽车其他控制系统的综合集成打下基础。
1 动力学模型
1.1整车动力学模型
根据汽车运动性能分析和控制问题研究的需要,建立车辆系统整车动力学模型。车辆底盘沿纵向轴的运动速度为u;沿横向轴的运动速度为v;整车(包括车身和非簧载质量)绕坐标轴z的转动角速度为ω;车身绕纵向轴xb相对底盘坐标系的侧倾角为φ,绕横向轴yb相对底盘坐标系的前俯角为θ;4个车轮绕各自转动轴的旋转角速度为ωi(i=1,2,3,4)。这是一个9自由度的4轮车辆动力学模型,如图1所示。
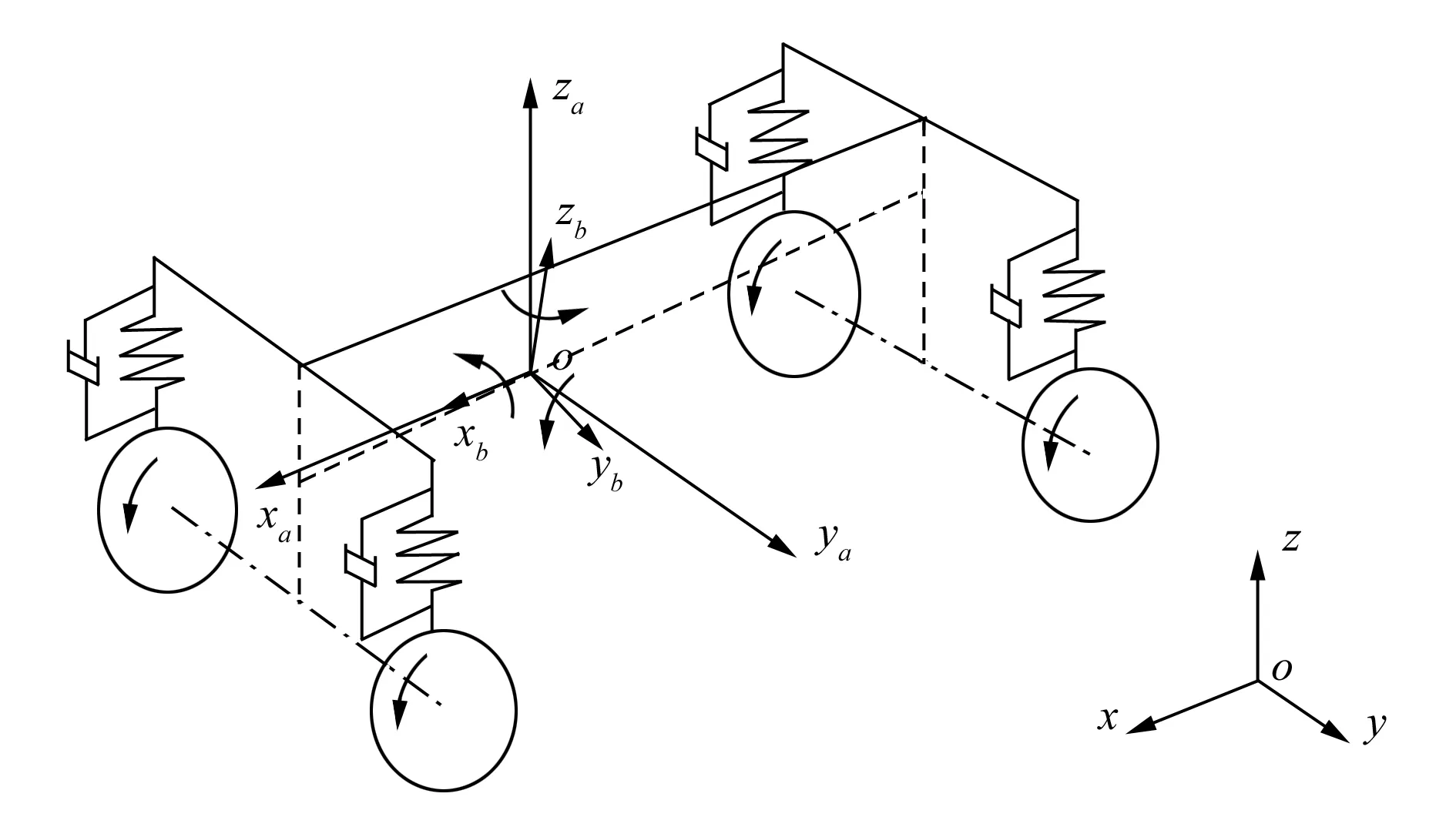
图1 车辆动力学模型
车辆整车受力情况如图2所示,由图2可得整车动力学方程[1-3]为:
(1)
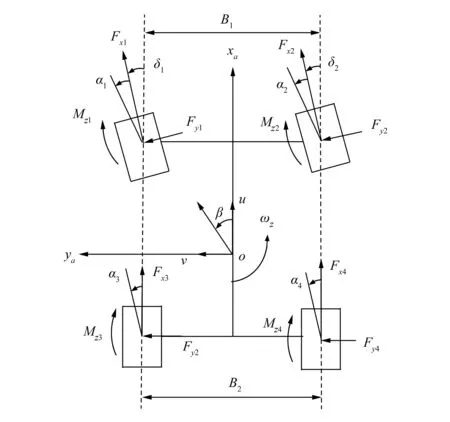
图2 整车受力示意图
式中:∑Fx,∑Fy分别为车辆质心处沿车辆纵向和侧向的合力,N;∑M为质心处绕z轴的转矩和,N·m;Fxi,Fyi(i=1,2,3,4)分别为4个车轮各自所受的纵向力、侧向力,N;δ1,δ2分别为两前轮的转角,rad;a,b分别为质心至前、后轴的距离,m;B1,B2分别为前、后轮轮距,m;Mzi(i=1,2,3,4)为回正力矩,N·m。
1.2车轮模型
轮胎受力情况分析[4-5]如图3所示。
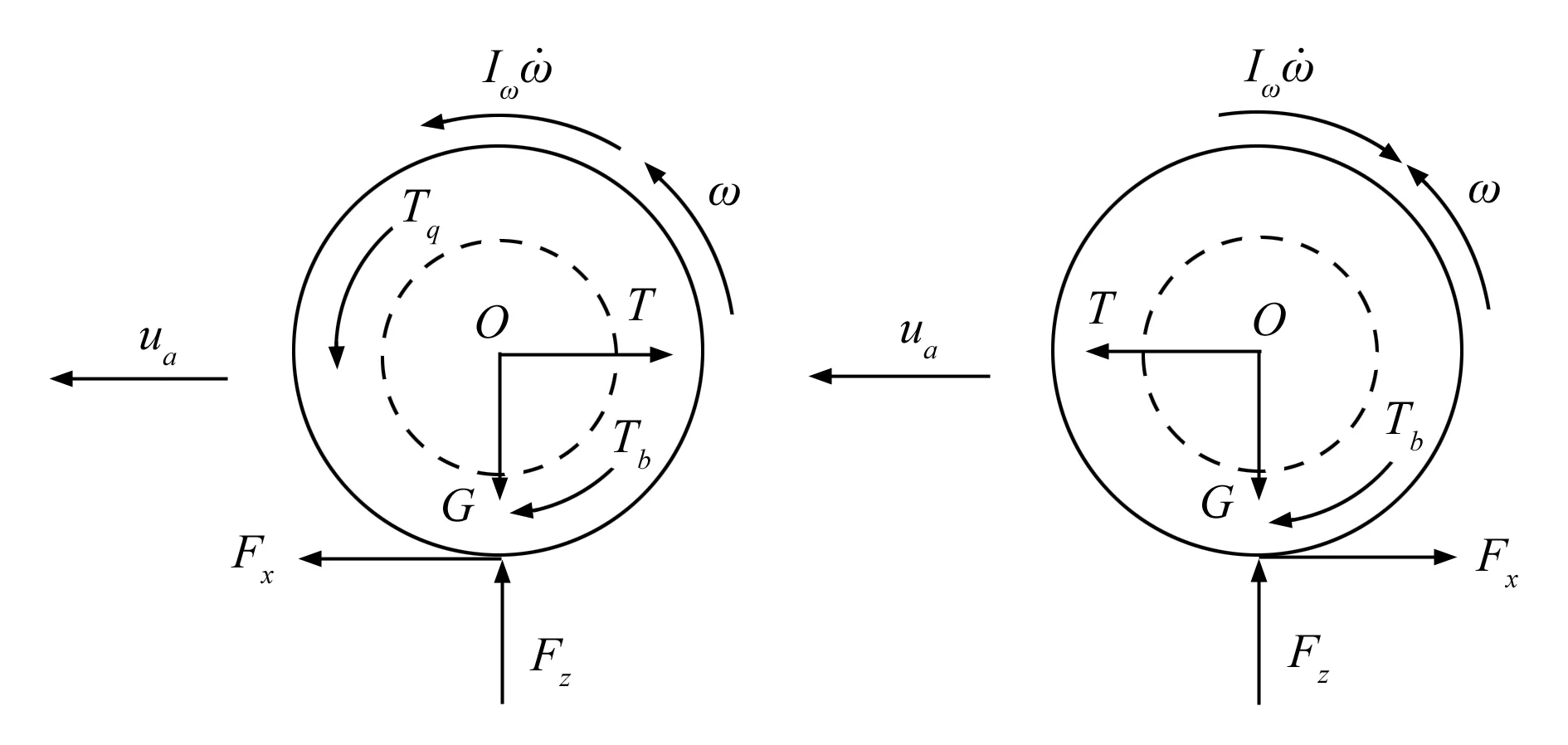
图3 前、后轮胎受力分析
假设轮胎为一刚体,则车轮的运动转矩平衡方程式可记为:
(2)
式中:Iω为车轮转动惯量,kg·m2;Tq为驱动力矩(当车轮为非驱动轮时,Tq=0),N;Fx为两驱动轮地面驱动力,N;R为车轮滚动半径,m;Tμ为两半轴驱动力矩,N·m。
当车辆俯仰、侧倾时,前后、左右车轮将产生质量转移,可得各轮法向载荷:
(3)
式中:Fzi(i=1,2,3,4)为车轮法向载荷,N;h为汽车质心高,m;L为轴距,m;B为前后轮距的均值,m;m为整车质量,kg;其他参数同式(1)。
轮胎受力与侧偏角有关,根据车辆运动分析各轮侧偏角表示为:
1.3发动机模型
在汽车行驶过程中,由于负载不稳定,发动机转速、节气门开度等参数发生变化,发动机大部分时间处于非稳态工况下工作。直接建立发动机动态特性模型有一定困难,为兼顾模型仿真的实时性与发动机模型的准确性,将发动机的动态特性简化为具有一阶惯性滞后环节。
(4)
式中:Te为发动机动态输出转矩,N·m;Tes为发动机稳态输出转矩,N·m;τ为滞后时间,s;te为时间常数,s;s为Laplace算子。
1.4传动系模型
从发动机曲轴输出的扭矩经离合器、变速箱、传动轴传递到差速器壳,其运动方程[1]如下:
η·Tp·ig·i0-Td
式中:Je为变速箱齿轮副的转动惯量;Jg为差速器壳的转动惯量;ωd为差速器壳的回转角加速度;η为传动效率;ig为变速器传动比;i0为减速器减速比;J0为差速器行星齿轮的转动惯量;Td为经过传动系统传递到两半轴的发动机输出扭矩,差速器再将该扭矩分配给左右半轴,其分配关系为:
式中:Tr1,Trr为左、右轮间差速器输出力矩,N·m;Tmr为轮间差速器内摩擦力矩,N·m 。
1.5轮胎模型
近几年,在汽车操纵动力学研究中应用较广泛的半经验模型有荷兰学者Pacejka提出的魔术公式(Magic Formula)和中国学者郭孔辉院士提出的统一轮胎模型(UniTire)。
Magic Formula模型是基于轮胎物理原形精确描述稳态条件下的轮胎六分力;UniTire模型以轮胎刷子模型为基础,在符合公式摩擦椭圆概念假设条件下,通过E指数形式来精确描述轮胎六分力[6-8]。通过对这两种模型建模机理的对比表明,UniTire轮胎模型比Magic Formula模型具有更强的理论基础;通过试验数据辨识模型参数,对比两种模型的全局辨识精度以及预测精度的结果表明,UniTire轮胎模型的全局辨识精度略高于Magic Formula模型,且具有更高的预测能力。因此,本文选用郭孔辉院士提出的参数少、形式简洁且满足高阶理论边界条件的“轮胎纵滑与侧偏联合工况下的半经验模型”。
2 ABS/ASR/ESP集成控制策略
当ESP开关打开时,汽车ABS/ASR/ESP集成控制系统判断汽车的工况,若需要ESP动作,则ESP通过ASR装置牵制发动机的动力输出,同时指挥ABS对各个车轮进行有目的的刹车,产生反横摆力矩,将车辆带回到所希望的运动轨迹上来。在汽车行驶过程中,ABS/ASR/ESP集成控制系统通过决策逻辑表来判断集成系统中哪一部分发挥作用。决策逻辑表见表1。

表1 汽车ABS/ASR/ESP集成控制系统决策逻辑表
3 整车模型及控制性能验证分析
汽车ABS/ASR/ESP集成控制系统模型如图4所示。
为检验汽车ABS/ASR/ESP集成控制系统性能,采用典型的危险工况进行仿真,即对开路面加速直行和对开路面转弯。车辆稳定性控制分为两类问题:一类是轨迹保持问题;另一类是稳定性问题,即横摆角速度问题,它与轨迹保持问题是相互联系的。为了更加直观地看到仿真效果,本文采用车辆运动轨迹和横摆角来衡量车辆稳定性控制的效果。以下仿真曲线图中,横轴为纵向位移(m);纵轴分别为横向位移(m)和车身横摆角(degree)。
3.1对开路面加速直行仿真
基于上述仿真模型,为充分比较驱动工况下车辆在无任何控制、仅ASR控制、ESP主导的集成控制下的性能,设置车辆的左侧附着系数为0.2、右侧附着系数为0.8、行驶初速度为50km/h、在对开路面上以5挡加速到120km/h,可得仿真结果如图5和图6所示。
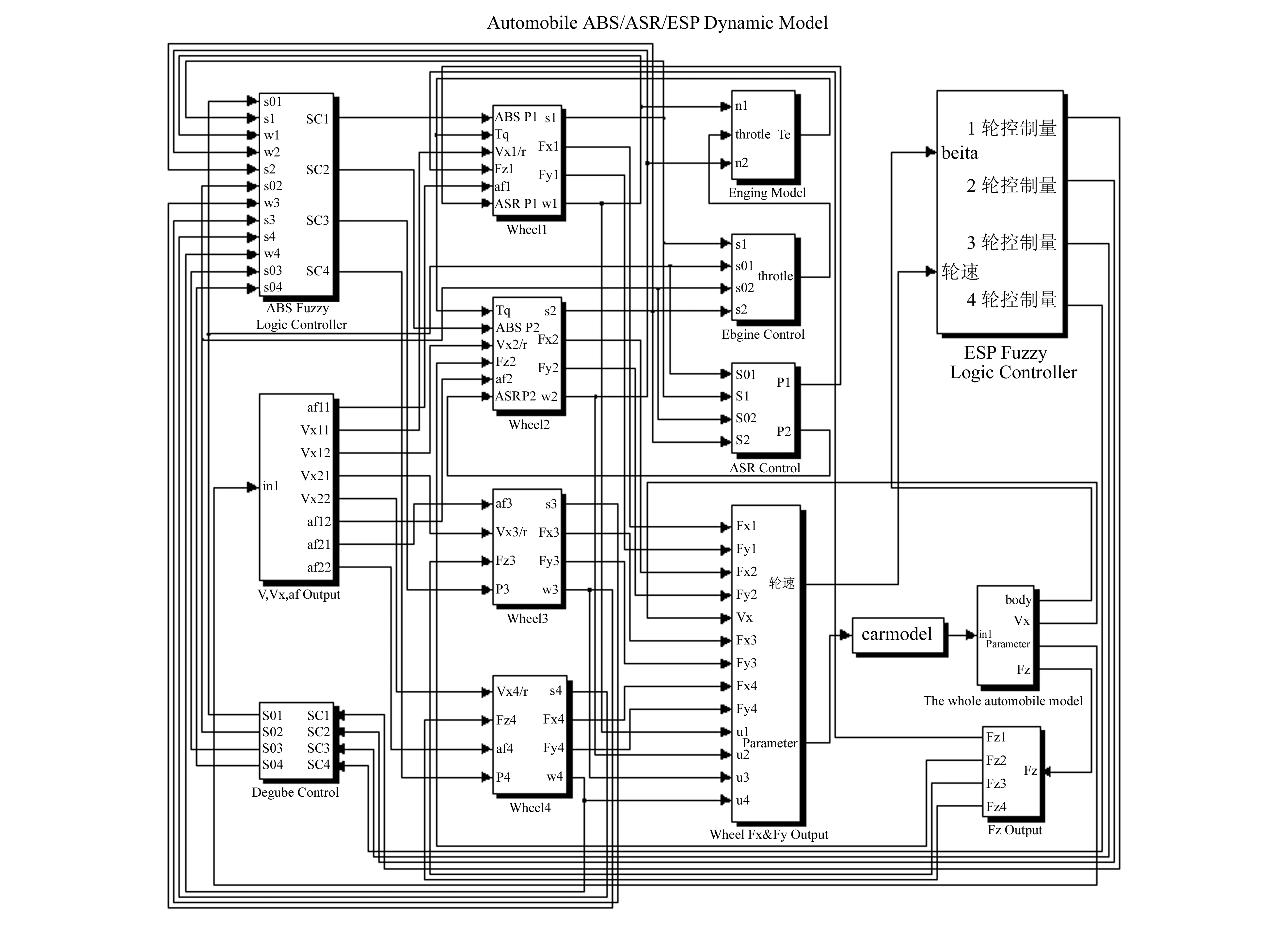
图4 汽车ABS/ASR/ESP集成控制系统整车动力学模型
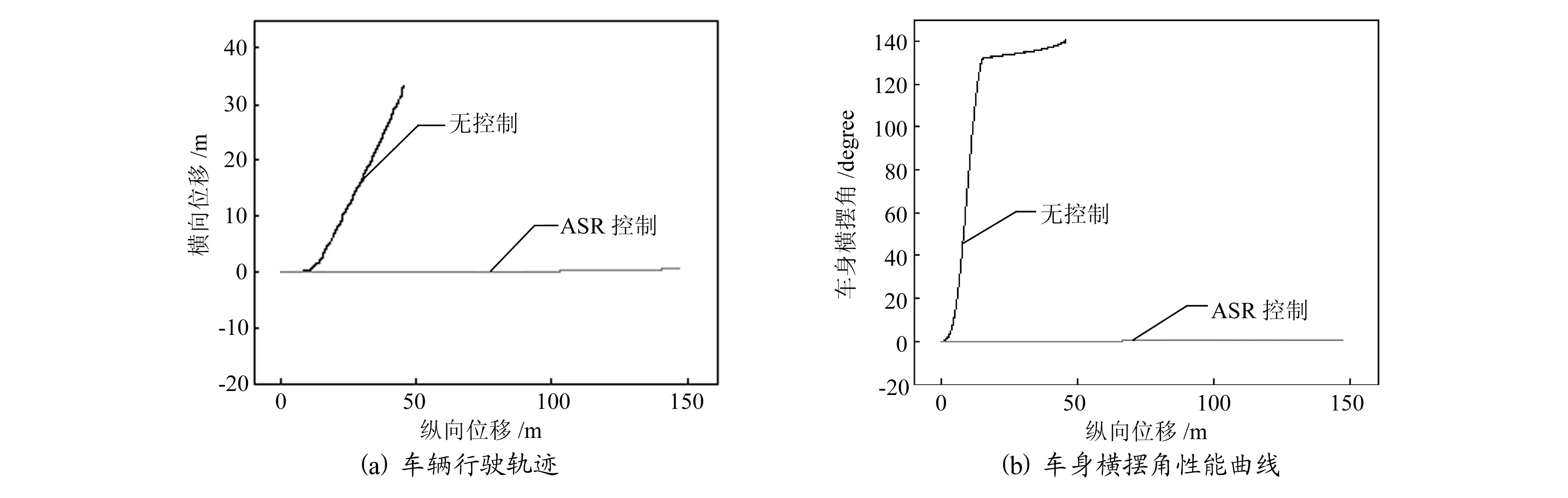
图5 无控制和ASR控制下的对开路面车辆加速直行仿真曲线

图6 ESP主导的集成控制下的对开路面车辆加速直行仿真曲线
从图5、图6可以看出,在ESP主导的集成控制模式下,车辆在高速行驶时能够一直保持非常好的直线轨迹和非常好的行驶稳定性。该种工况下ESP主导的ABS/ASR/ESP集成控制系统未达到ESP横摆力矩控制的条件,依旧需调用ASR进行控制。虽然如此,启用ESP主导的集成控制效果仍然比ASR模式下好。
3.2对开路面加速转弯仿真
设置车辆的左侧附着系数为0.2、右侧附着系数为0.8、行驶初速度为50km/h、在对开路面上以5挡加速到120km/h、左前轮转向角为8°,可得仿真结果如图7和图8所示。
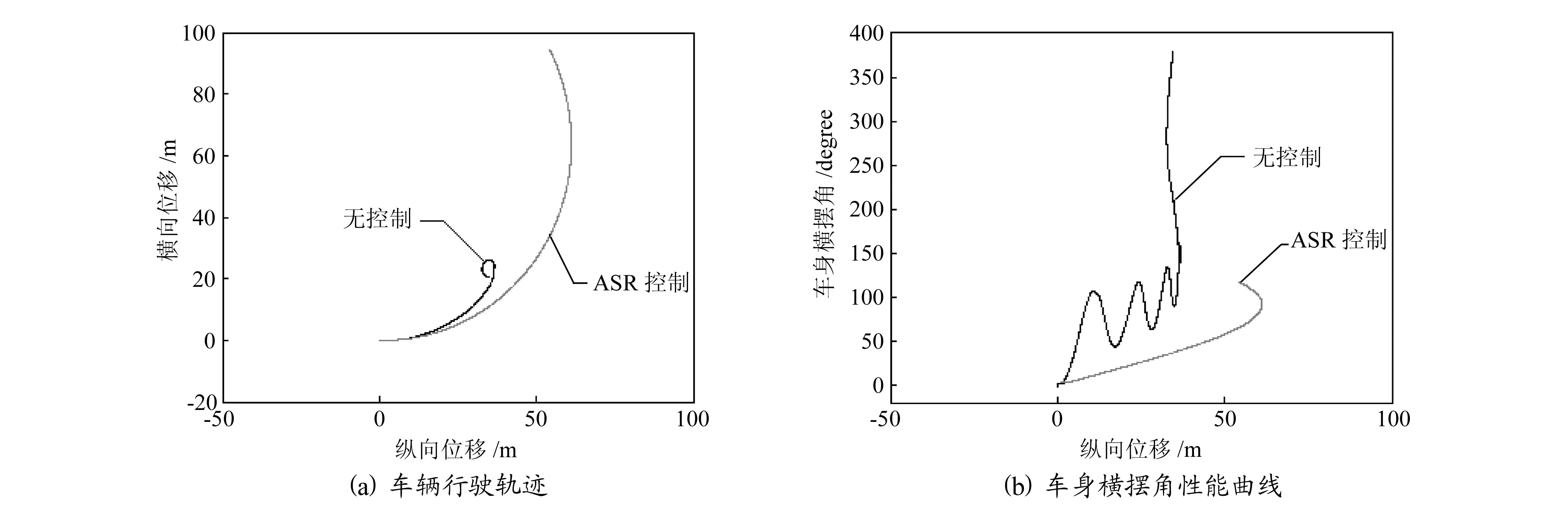
图7 无控制和ASR控制对开路面车辆转弯仿真曲线
图8 ESP主导的集成控制下的对开路面车辆转弯仿真曲线
从图7、图8中可以看出,在ESP主导的集成控制模式下,车辆在高速转弯行驶时能够一直保持良好的中性转向弯道轨迹和非常好的行驶稳定性。这说明ESP主导的ABS/ASR/ESP集成控制系统控制效果较好。
以上不同工况、不同路面状况的仿真分析结果表明,本文所建车辆动力学模型是合理的,汽车ABS/ASR/ESP集成控制策略是有效的。
4 结束语
本文主要基于某轿车进行了ABS/ASR/ESP集成控制策略研究,取得了以下成果:
a.在MATLAB/Simulink环境下实现汽车ABS/ASR/ESP的集成控制,并通过各种工况的仿真验证了集成控制策略的有效性和集成控制的优势。
b.所建的基于某轿车的整车动力学模型和仿真模型是合理的。ABS/ASR/ESP集成控制能够提高汽车在危险工况下的操作稳定性。
c.为后续的汽车底盘集成控制研究提供了基础。采用同样的研究思路可以将汽车底盘上的其他装置集成在一起,以提高汽车整车性能。
[1] 贾豫东,宋健,孙群.用于电子稳定程序的汽车模型和控制策略[J]. 公路交通科技,2004(5):132-136.
[2] 王国业.汽车ABS/EBD/VSC集成控制技术研究[D]. 北京:北京理工大学, 2007.
[3] 王斌.捷达GTX轿车巡航控制系统关键技术研究[D]. 北京:北京理工大学, 2006.
[4] Thomas D Gillespie.车辆动力学基础[M]. 赵六奇,金达锋,译. 北京:清华大学出版社,2006.
[5] 喻凡, 林逸. 汽车系统动力学[M].北京:机械工业出版社,2005.
[6] PACEJKA H B, BAKKER E. The magic formula tire model:vehicle system dynamics, vehicle system dynamics[J]. International Journal of Vehicle Mechanics and Mobility, 1992(21):1-18.
[7] 郭孔辉. 汽车操纵力学[M].吉林: 吉林科学技术出版社,1991.
[8] EGBERT BAKKER, HANS B PACEJK,LARS LIDNER. A new tire model with an application in vehicle dynamics studies[R]. SAE 890087,1989.
[9] 曾蔚瑛,付燕荣,王国业. 基于PID控制的越野车ESP控制策略研究[J]. 车辆与动力技术, 2009(6):12-16.
[10] 刘显贵.汽车底盘关键子系统的稳定性分析与集成控制研究[D].合肥:合肥工业大学,2010.
TheDevelopmentofIntegratedABS/ASR/ESPControlUnitfortheAutomobile
FU Yanrong1, WANG Guoye2, GUAN Zhiwei1
(1.Tianjin University of Technology and Education, Tianjin, 300222, China)(2. China Agricultural University, Beijing, 100083, China)
Based on the mathematical models including the nine DOF vehicle dynamics model, engine model, wheel model and transmission model, it designs the control strategy under breaking condition and driving condition. It analyzes the ABS/ASR/ESP integration control system algorithm and develops various parts of the control strategies and process control procedures. This dissertation effectively makes the various parts to determine the integrated control strategy in seeing the braking condition and driving conditions. It simulates the ABS/ASR/ESP integrated control in MATLAB/Simulink, proves the effectiveness of the controller and the advantages of integrated control under various operating conditions.
Dynamic Model; ABS/ASR/ESP; Integrated Control; Simulation
10.3969/j.issn.2095-509X.2014.02.008
2013-12-26
天津职业技术师范大学科研发展基金资助项目(KJ10-15)
付燕荣(1985—),女,内蒙古临河人,天津职业技术师范大学讲师,硕士,主要研究方向为汽车动力学、车辆机电控制。
U461.6
A
2095-509X(2014)02-0035-06
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
小读者(2019年24期)2020-01-19
山东冶金(2019年3期)2019-07-10
汽车观察(2019年2期)2019-03-15
消费导刊(2018年10期)2018-08-20
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
发明与创新·中学生(2016年7期)2016-05-14
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
噪声与振动控制(2015年4期)2015-01-01
