
高举升臂的高原型地下铲运机传动系统的设计
2014-09-03 10:53张学稳
有色设备 2014年2期
张学稳
(安徽铜冠机械股份有限公司 技术中心,安徽 铜陵 244000)
高举升臂的高原型地下铲运机传动系统的设计
张学稳
(安徽铜冠机械股份有限公司 技术中心,安徽 铜陵 244000)
本文以WJ-3G高原型地下铲运机为研究对象,首先对其整机传动系统部件进行选型,并根据柴油机外特性参数和液力变矩器的特性参数进行匹配计算,从而验证各传动部件选型的可行性;再利用Solidworks软件对高举升臂的工作机构进行三维实体建模,通过Solidworks与ANSYS软件的接口将模型输入到ANSYS中,从而对极限工况下的工作机构进行力学分析、疲劳寿命分析,从而为高举升臂的可靠性设计提供了理论保证。
高举升臂;高原型;地下铲运机;匹配计算
0 引言
地下铲运机是地下矿山无轨采矿的核心设备。地下铲运机工作时,由于地面条件很差,工作条件很恶劣(如硬路面、软路面、上坡、下坡、急转弯、空载、满载等),影响牵引性能的因素很多,各系统都处于动态工作过程[1],而高原地区的空气稀薄,空气中含氧量、大气压、空气温度、水沸点也较低,这些都将引起地下铲运机的动力性有所变化[2],因此传动系统各部件的合理匹配就尤为重要;而卸载高度是地下铲运机的一个基本参数,为了实现WJ-3G高原型地下铲运机的卸载高度由1850 mm增至2300 mm,从而满足客户的高举升臂要求,需要对现有工作机构进行分析设计。
1 高原型地下铲运机传动系统的设计
1.1 传动系统各部件的选型及参数
现3立方柴铲的柴油机选用德国道依茨公司的BF6L914C涡轮增压风冷发动机,额定功率是150 kW,额定转速是2300 rpm,额定扭矩370 Nm;液力变矩器选用美国DANA公司的C273型变矩器,偏置比是0.96,失速比是3.095,变矩器泵轮与柴油机飞轮采用13.00英寸的柔性盘连接;变速箱选用美国DANA公司的R32000系列变速箱,前后4档,1档至4档的传动比分别为5.01、2.41、1.39、0.81;前、后驱动桥选用美国DANA公司的16D2149,总传动比是26.118;轮胎根据前、后桥轴荷及轮胎承载能力,选用17.5-25轮胎,动力半径0.650 m,其整机重量是17.6 t,载重量是6 t。
柴油机在高海拔或高温地区工作时,为了不使燃油品质变坏,柴油机受热部件热负荷过分增大的情况下,必须降低喷油量,从而使柴油机功率下降,为此需要对柴油机功率进行修正。按照德国道依茨公司功率修正办法,在海拔1000 m以下,功率修正仅与大气温度有关,1000 m以上功率修正则与海拔高度及大气温度都有关[2],海拔每升高1000 m,功率对应下降8%~13%,约10 kW,海拔高度及温度变化对柴油机动力性能的影响,具体见图1。

图1 FL914W、FL413FW发动机在海拔高度及温度变化的情况下功率下降曲线
根据图1所示,高原型3立方柴铲的柴油机初步选定为德国道依茨F8L413F涡轮增压风冷发动机,额定功率是188 kW,额定转速是2500 rpm,额定扭矩430 Nm,其他传动件同3立方柴铲,在4000~5000 m高原上工作,经损失后柴油机功率约为150 kW,转速约为2300 rpm,扭矩约为375 Nm。
1.2高原型3立方柴铲各档位速度、牵引特性与爬坡能力的计算
根据地下铲运机传动系统动力传递过程,现计算地下铲运机在1档时的行驶速度、牵引力、总传动比、动力因素和爬坡角,具体计算过程如下:
V=0.377NTrk/Σ[2]=
0.377×2300×0.65/0.96×5.01×26.118=
4.49 km/h
(1)
式中V—地下铲运机行驶速度,km/h;NT—变矩器涡轮转速,r/min;rk—轮胎的滚动半径,m;

(2)
式中Σi—传动系统总传动比;TE—牵引力,N;MT—涡轮输出力矩,N·m;η—传动系统总效率,η=0.8;AC—空气阻力系统,AC=0.046 N/(km/h·m)2;FA—地下铲运机迎风面积,m2;
Σi=iORiTRiAR[2]=0.96×5.01×26.118=125.6
(3)
式中Σi—传动系统总传动比;iOR—变矩器偏置传动比;iTR—变速箱各档传动比;iAR—驱动桥总传动比;
D=TE/EVW[2]=179000/236000=0.76
(4)
式中TE—牵引力,N;D—地下铲运机动力因素;EVW—地下铲运机总重;
α=arcsin(D-f)[2]=arcsin(0.76-0.02)=47.7°
(5)
式中α—地下铲运机爬坡角,°;f—滚动阻力系数,f=0.02;SC—地面附着系数,SC=0.6。
再分别将变速箱2档、3档和4档的传动比2.41、1.39、0.81代入公式(1)、(2)、(4)、(5),得到表1结果:
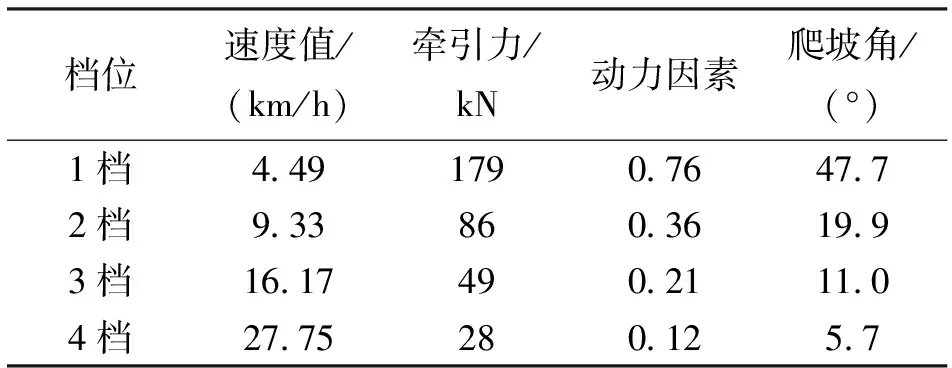
表1 各档位动力性能参数比较
根据表1可知,该高原型地下铲运机具有较好的牵引能力和爬坡能力,能够满足矿山的实际使用要求。
2 高举升臂的工作机构设计
2.1 动臂改进后模型
为实现地下铲运机卸载高度由1850 mm增至2300 mm,满足客户特殊使用要求,利用Solidworks对地下铲运机高举升臂进行三维实体建模可知,需将大臂加长130 mm,铲斗缩短200 mm,举升缸行程由540 mm加长至555 mm,见图2。

图2 高举升臂的三维模型
2.2 高举升臂的力学分析
对整个高举升臂工作机构进行力学计算,由于在工作机构的插入、收斗、举升、卸斗这4种工况中,插入工况受力最大,更能反应实际工况。插入姿态示意图如图3所示,对高举升臂的插入姿态各铰接点受力分析结果,见表2。
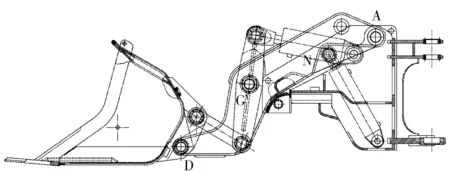
图3 插入姿态示意图
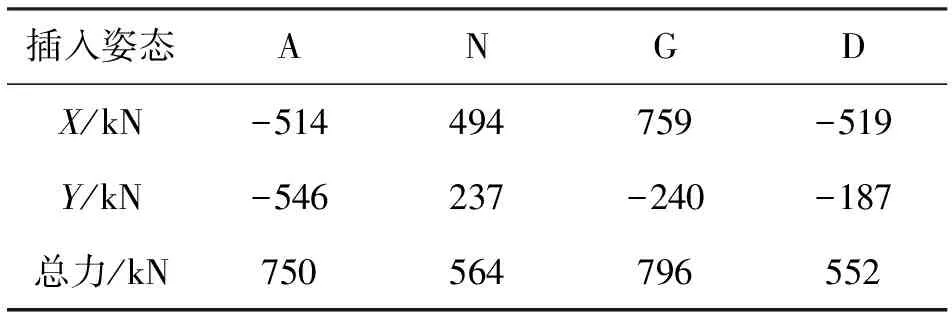
表2 插入姿态各点受力情况
由表2可知:插入状态时,动臂上G点在X方向上受力最大,在总的受力上也是最大。
2.3 高举升臂的静力学分析
在ANSYS中对高举升臂进行划分网格、创建耦合点、施加边界约束条件、施加载荷(对动臂施加2倍静力载荷来模拟冲击工况)后在求解器中进行求解计算[3],如图4所示,得应力分析结果如图5所示。
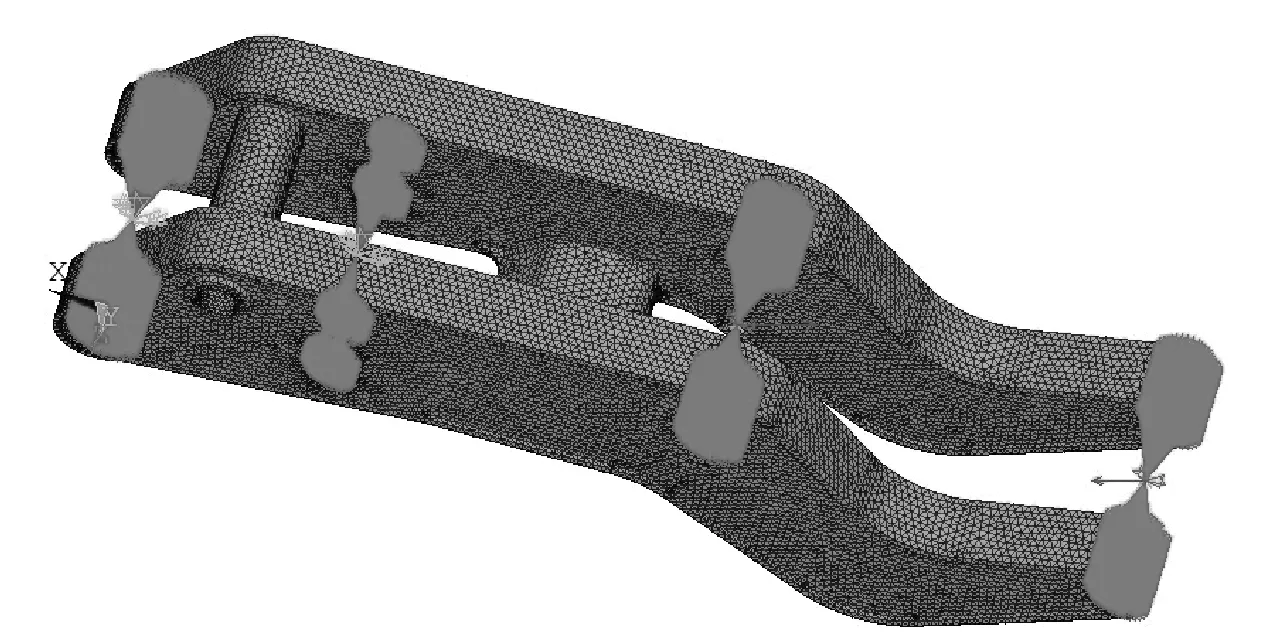
图4 前处理模型

图5 高举升臂应力分析结果
由图5可知:高举升臂的危险部位还是发生在动臂围板上面部位和前曲部位,两危险部位的最大应力如图6和图7所示,局部应力图如图8所示。
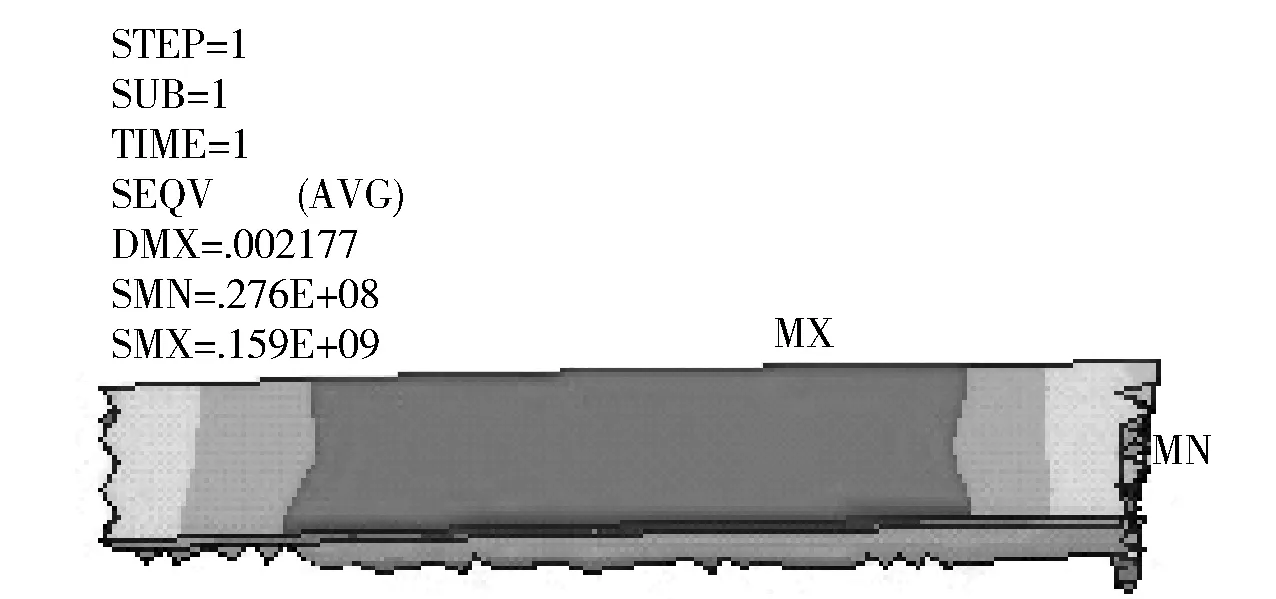
图6 围板上面危险部位
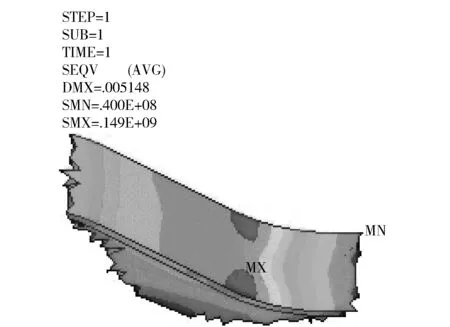
图7 围板前曲部位
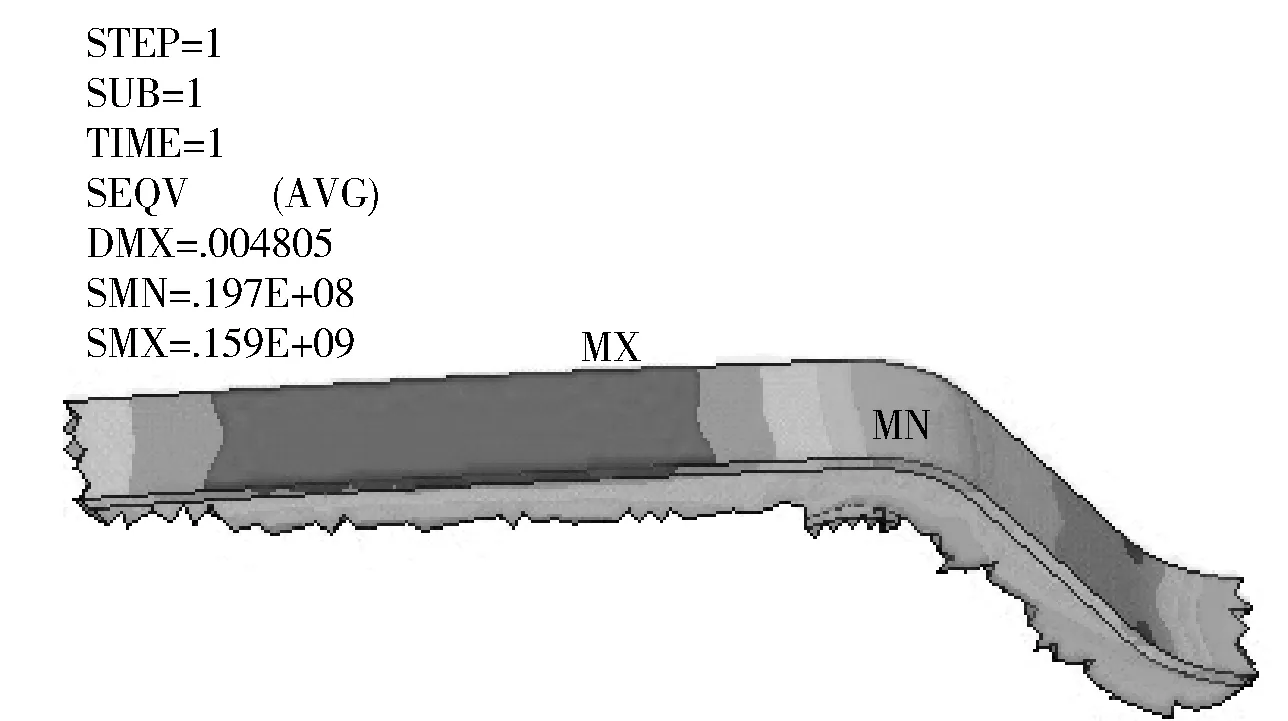
图8 围板局部危险部位
由图6和图7可知,最容易发生破坏的两个部位的最大应力分别是159 MPa和149 MPa。相对于HG70材料的抗拉强度是700 MPa来说,是满足强度、刚度要求的。
HG70材料的S-N曲线如图9所示。
2.4 疲劳寿命分析
对高举升臂计算的应力结果进行疲劳寿命计算,计算结果如图10所示,其使用年限见表3。
由表3可知:对于把动臂与铲斗连接处水平部位加长130 mm后的模型进行应力分析得危险截面的平均应力为159 MPa,计算其疲劳寿命,得到使用年限为1年6个月。
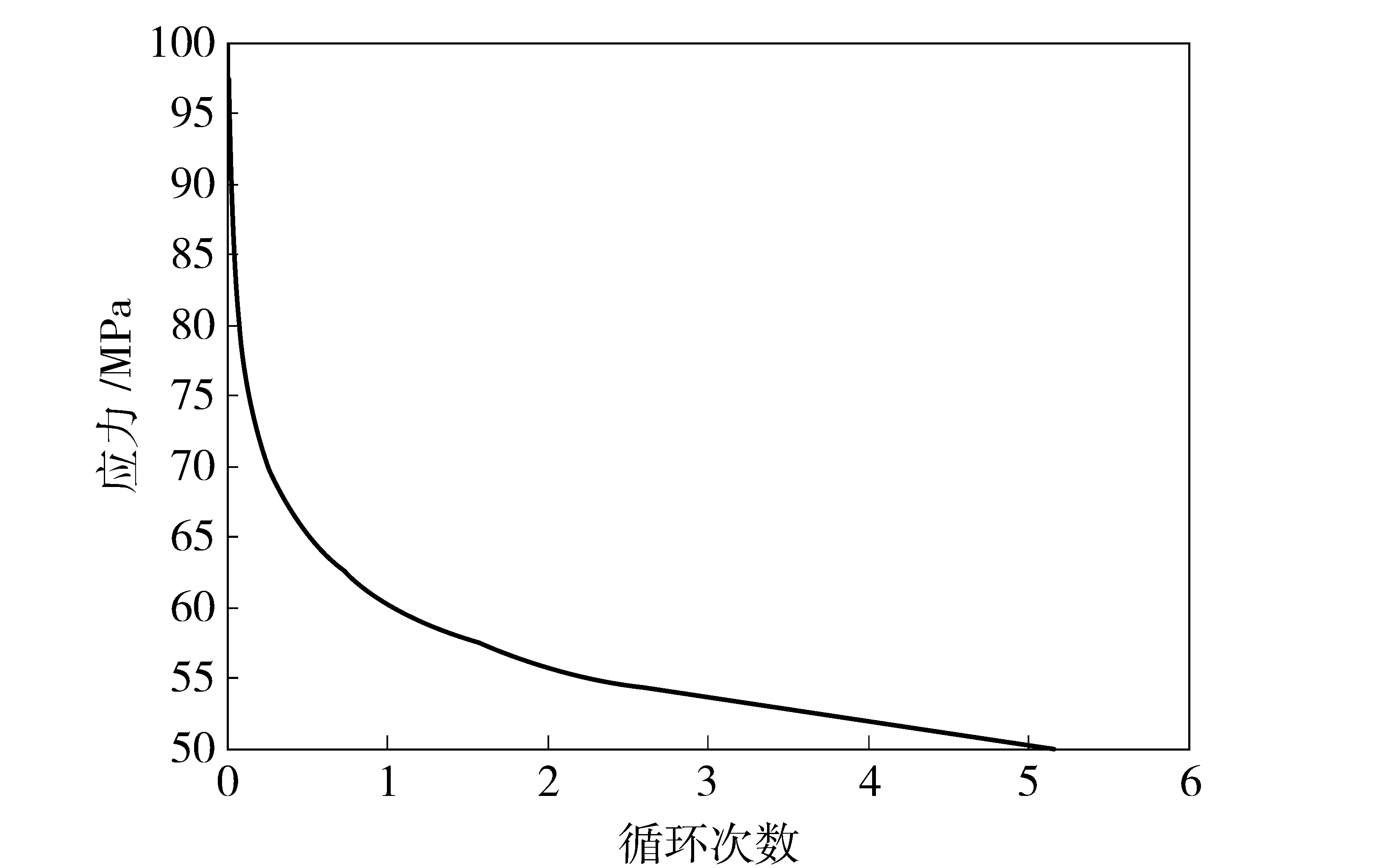
图9 HG70的S-N曲线
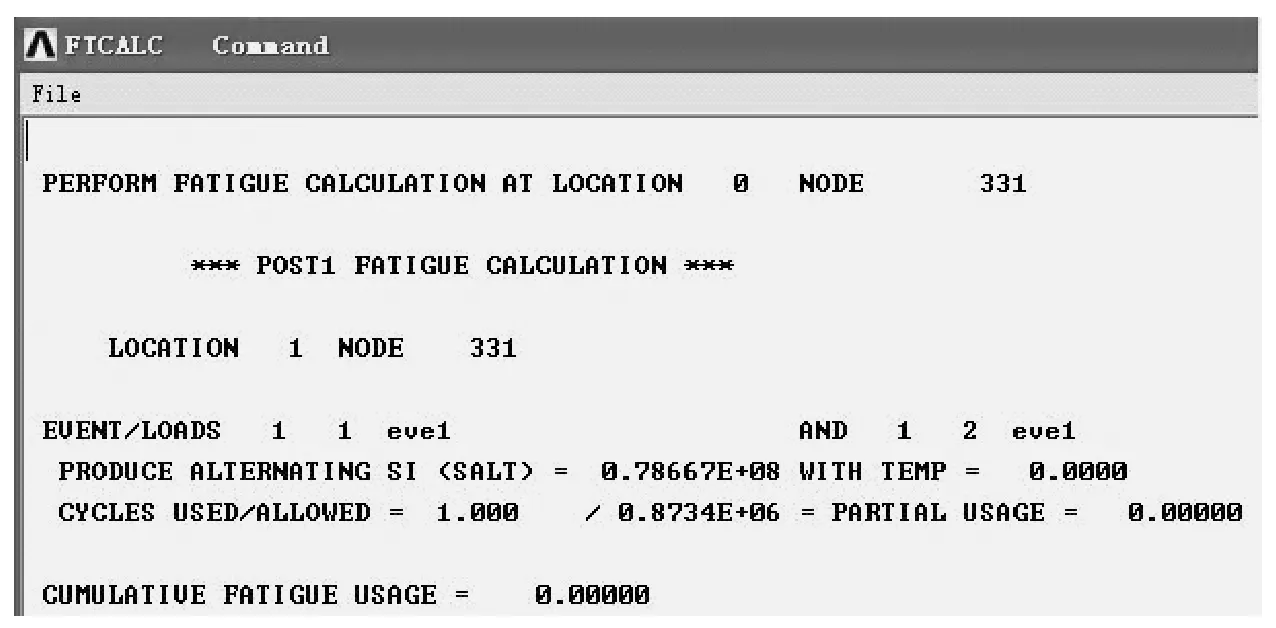
图10 动臂加长后疲劳寿命计算结果

表3 动臂加长后使用年限
2.5 方案比较
将原动臂方案和现高举升臂方案进行比较,具体见表4。

表4 两种方案比较结果
由表4可知:高举升臂与原动臂相比,与铲斗连接处的水平部位加长130 mm,危险截面最大应力增大8 MPa,使用年限少7个月,使用年限仍满足客户要求。
3 结论
(1)根据柴油机和液力变矩器共同工作的输出特性,进行了高原型3立方柴铲各档位牵引特性和爬坡能力计算,计算结果验证了各传动件选型的可行性。
(2)通过对高举升臂的工作机构进行受力分析,确定了其使用年限,从而满足了客户的特殊要求。
[1] 战凯.12 t地下自卸卡车传动系统匹配及牵引特性分析[J].矿山机械,1999,(2):21-22.
[2] 高梦熊.地下装载机[M].北京:冶金工业出版社,2011.
[3] 谢龙汉.ANSYS结构及动力学分析[M].北京:电子工业出版社,2012.
TransmissionDesignofPlateauHighLiftArmofUndergroundLHD
ZHANG Xue-wen
(Technology Center, Anhui Tong Guan Machinery Co., Ltd. Tongling 244000, China)
The paper focuses on WJ-3G plateau underground scraper, takes whole driveline components selection, matching based on external characteristics of the diesel engine parameters and torque converter parameters to verify the transmission parts feasibility selection. Uses Solidworks software to reuse high lift arm body of work for three-dimensional solid modeling, by Solidworks and ANSYS software interface to ANSYS model input, thus the limit conditions for the work of agencies mechanical analysis, fatigue analysis, so as to high lift arm design provides a theoretical guarantee reliability.
high lift arm;plateau;underground LHD;matching calculation
2013-10-16
张学稳(1986-),男,安徽灵璧人,助理工程师,大学本科,主要从事机械设计工作。
TD422.4
B
1003-8884(2014)02-0041-04
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30
科学技术创新(2020年32期)2020-11-05
消费导刊(2020年1期)2020-07-12
世界有色金属(2019年21期)2020-01-09
——变矩器的锁止控制
汽车与驾驶维修(维修版)(2019年9期)2019-10-14
建筑机械(2018年11期)2018-11-22
金属加工(热加工)(2018年10期)2018-10-26
汽车零部件(2016年10期)2016-12-06
汽车维修与保养(2015年12期)2015-04-18
传动技术(2014年1期)2014-02-27
