
可穿戴式自主定位技术的零速触发算法研究*
2014-08-29 11:47李超苏中朱嘉林北京信息科技大学高动态导航技术北京市重点实验室北京100101
传感技术学报 2014年5期
李超,苏中,朱嘉林(北京信息科技大学高动态导航技术北京市重点实验室,北京100101)
可穿戴式自主定位技术的零速触发算法研究*
李超,苏中*,朱嘉林
(北京信息科技大学高动态导航技术北京市重点实验室,北京100101)
所谓步态,即指人们在行走时躯干与腿的姿势,以及脚部接触地面时的状态。现如今,相关步态特征的应用技术已飞快地发展了起来。并在安全系统、人机交互、导航定位、医疗诊断等方面有了广泛的应用。而本文将提出一种利用三条件法将可穿戴式MEMS IMU(Inertial Measurement Units)用来实现检测静止步态的技术,此技术可以在定位领域,将检测出的静止状态作为一种触发条件,为零速修正、地磁角度更新等静态校准技术服务,从而使得定位的实时性和精确性得以更好的保障。本文通过将IMU分别安置在人体的脚部,腰部和胸部进行静止步态的检测,最终通过测试数据的仿真得出结论:将IMU放在脚部的静态检测效果要远远好于其他两种情况。
可穿戴式;微机电惯性测量单元;静止步态检测;定位零速修正触发
人体步态特征的识别与捕捉,和其他生物特征识别技术(如指纹、人脸、虹膜等)相比,它具有不受距离影响、非侵犯性、难以伪装、受环境影响小等独特的优点[1-3]。本文便是根据其特点将静止步态的捕捉技术应用到导航定位领域当中,使静止步态作为一种触发条件,来开启零速修正等定位校准技术,从而修正IMU定位所带来的长时累积误差,最终提高定位的精度[4-5]。在现阶段,相关的步态检测技术大致可概括为以下几类:图像分割识别、医学生物识别、数理统计识别等[6-9]。然而上述几类方法虽然具有一定的实用性,但也分别存在着不足之处。而本文提出的是一种基于惯性器件所测量出的加速度、角速度等相关物理信息来完成步态的识别工作。所需要人为因素亲自参与的地方几乎为零,只需其担当载体即可。而且相对其测量设备也较为简易,轻便。后期的检测算法也不繁琐,执行所需时间较短。所以经比较,无论是从便捷性,可靠性还是实时性来看,本文所提出的这种检测技术的综合性和实用性更强。
1 人体步态三条件法检测流程及原理
人体运动步态检测利用惯性测量器件的三轴加速度计和三轴陀螺仪所采集的数据,通过相关算法来进行步态的判断,
具体流程如图1所示。

图1 人体运动步态检测
在零速修正方面,步态检测是至关重要的一个环节。为保证其检测的准确性,同时利用加速度计和陀螺仪的输出数据,采用三条件(C1,C2和C3)判断算法,并利用中值滤波的方法,便可有效地判断人体运动的步态,在这里,以状态“0”表示运动,状态“1”表示静止[10-13]。具体的三条件描述为:
条件1(C1):加速度计输出合成幅值,处于给定的上下阈值之间,则人体静止。
定义加速度计的输出合成幅值为:

定义给定阈值为:thamin=9 m/s和thamax=11 m/s,并有:

条件2(C2):加速度计输出的局部方差,低于给定的阈值,则人体静止。
定义加速度计输出的局部方差为:


s为半窗口采样数量,通常定义其值为15。定义给定阈值为:thσa=0.5 m/s2,并有:

条件3(C3):陀螺仪输出合成幅值,低于给定的阈值,则人体静止。
定义陀螺仪输出的合成幅值为:

给定的阈值为:thωmax=50°/s,并有:

3个条件之间采用“与”逻辑,即只有当3个条件的判断结果都为“1”时才认为步态处于绝对静止状态。再通过中值滤波方法,便可有效地判断连续输出的运动结果,剔除噪点,获得有效、合理的步态检测数据。
2 本技术中应用到的滤波技术
2.1 局部方差滑动滤波技术
在本技术三条件法的C2条件中,应用到了局部方差滑动滤波技术。此条件的叙述表达式为式(3)~式(5)。
其中,k为滑动窗口的中心值,s的采样数量为窗口大小的一半。通过计算窗口内部的局部方差,可以判断此区间2s+1个采样点的稳定性,即稳态阶段局部方差应接近为零。故最终根据阈值判断,小于阈值接近为0的点,认为就是步态静止的点,其矩形波对应取值为1,相反,大于阈值的,即为窗口区间波动幅度比较大,因此可认为此中心点不能算作绝对静止点,所以剔除掉,其矩形波值对应为0。中心点按步进为1的步幅依次划过每个采样点,除了前s个采样点与最后s个采样点当不了中心点,不过因前后在采样过程中均保持的是原地静止状态,故可人为设定为静止态1。所以最终经过此滤波后的平稳阶段可认为是可靠性更强的绝对步态静止时刻,从而使检测效果更好。
2.2 中值滤波技术
在三条件“与”后的波形图处理过程中,此滤波技术发挥了两种作用。第一,波形图中会发现有一些“野点”的存在,这样会使得静止步态的检测工作受到影响。为了剔除这些“野点”,因此采取了此技术,即类似于局部方差滑动滤波技术,选取一个采样中心和一定的窗口空间,将采样点由大到小进行排列,将其中最大值与最小值去掉,并算出剩余采样点的平均值,同样,也是设立一个阈值,若上述平均值大于该阈值,则认为是1,反之,则认为是零。具体操作及滤波效果详见3.1节。其第2个作用,即为步态补齐作用,如图2所示。很明显,图2圈内的波形有残缺,但实际上还是为完整的一个静止步态。根据时间的推算,图2所表示的时刻为上楼梯的时间段,如图3所示。为究其根源,将三条件波形图叠加,如图4所示。

图2 中值滤波波形补齐作用

图3 波形残缺点对应实时图
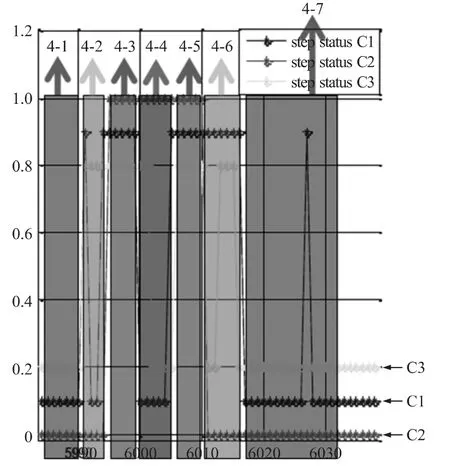
图4 三条件的叠加图此时刻局部放大图
在此时刻将叠加图进行局部放大并分析:图中分为四类阶段。为分析及观察同时刻方便,这里将三者的高低电平设为不同的值加以区分,仅用以示意,无具体含义。
开始的4-1部分是上楼时,前脚掌准备触地的阶段,之后的4-2部分为前脚掌触地阶段,在其之后便进入了步态静止阶段。4-3区域为支撑脚脚后跟下落及开始换脚的阶段,之后的4-4为完成全脚掌触地的时刻。但为保持身体的平衡稳住步态,脚部有时会产生轻许晃动,使得加速度计和陀螺仪的合成输出值都略超出阈值范围,导致C1与C3条件的阈值判断会拉回零点。不过此阶段加速度的合成幅值整体波动并不大,C2条件的输出依旧为1。于是所呈现出的便是4-4那样的区域,也就是此时刻出现那几个为0点的地方。紧接着后面4-5区域是完成换脚的阶段,与此同时,支撑脚的全脚掌还是保持相对静止的稳定状态。跟着4-6阶段所表示的是原支撑脚后脚跟的抬起过程。之后原支撑脚向下一级台阶迈进的过程就是上图最后4-7部分所呈现的那样。综上通过分段分时的步态分析,就不难解释图2中为什么会有一小段残缺波形的出现了。经多次测量观察,总结出:这种不稳定多发生在容易使身体不平衡上下楼梯的阶段。若遇上述情况不经处理,对后期的静态触发会有所影响。所以必须要通过中值滤波进行波形的修复处理。经滤波后,修补好同时刻的完整波形如图5所示。
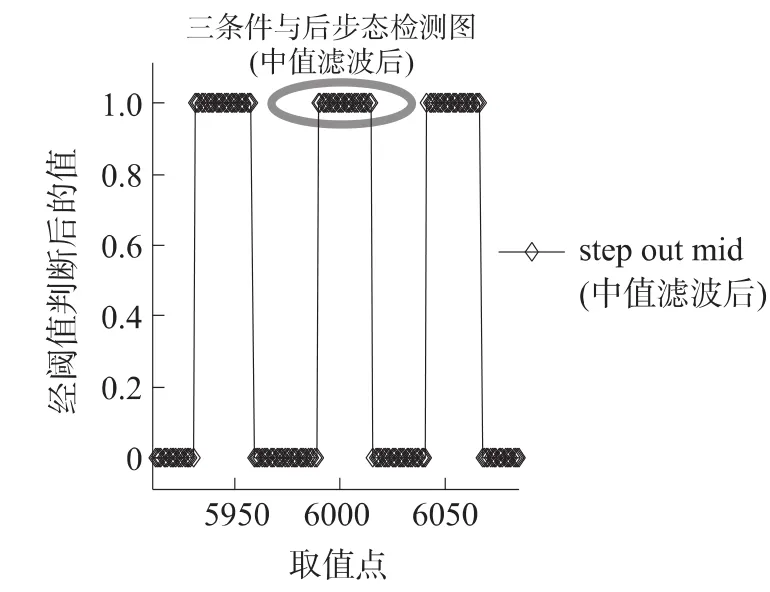
图5 滤波修补好后同时刻波形图
3 实验测试
本技术测试的主要工具为含三轴加速度计、三轴陀螺仪以及三轴磁强计的MEMS IMU惯导器件和笔记本电脑一台。通过上位机软件记录实时器件输出的相关测量信息。测量环境为室内的6层至5层,途中需上下楼各一次,中间路线为直线的走廊。最终回至预先标定好的起点,完成封闭的行进路径。
3.1 惯导模块安置在脚部的测试结果
首先先将IMU安置在脚部进行测试。测试示意图如图6所示。
根据上述第1节中所提算法,在MATLAB中导入数据并编写程序,进行仿真计算,最终测试三条件下的步态检测图如图7所示。
图6 脚部测试示意图
图7可以很明显地看出步态稳定的时刻,即图形较为平稳的阶段。之后,便根据所设定的阈值进行编程,将其三条件下的点按阈值进行“0”,“1”分界,并将三者的矩形波形图合并到一起,如图8所示。

图7 三条件脚部重叠步态检测图
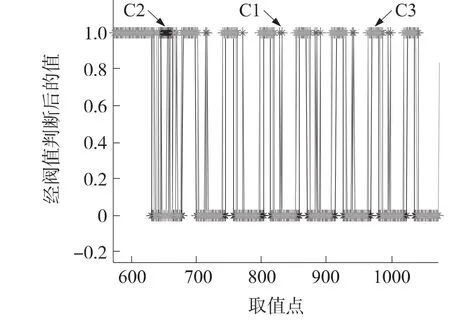
图8 脚部三条件重叠步态检测图
由此可见,只有三者均覆盖住“1”时,即”&”后值为“1”,如图9的高电平“1”所示,即表示行人的单脚此刻为的静止状态,反之图9的低电平表示为非静止状态。将其图放大后,便会发现前文所提“野点”的存在:如图9所示。

图9 野点示意图
经分析可以看出,野点的出现发生在上下楼的拐角处。由于拐弯处的慢行,会引起某一时刻加速度计与陀螺仪的合成幅值掉入阈值范围内,而且速度的缓慢,使得这一阶段的加速度合成幅值波动并不很大,这样也貌似符合C2为1的条件。这样此时刻便会营造出一个假的“静止步态”出来,如上图所示,其实这个点并不能代表真正的静止步态,而其本质是干扰测试的野点。这样,同样会影响后期的静态触发工作,因而还需采用中值滤波的方法将其波形的野点进行剔除,滤波后的图形如图10所示。

图10 中值滤波后原野点处放大图
接下来,便可以根据完整且无野点的图10的波形,最终来进行步数的统计。但需要特别注意的是,本测试中的惯导模块只绑在了左脚上面,进而最终的高电平数需乘2,才会得出双脚实际所走出的步数。最终根据上述的波形和实际测量时的迈步规定来进行编程测算步数。最终实验数据的计算结果与人为统计的结果以及和欧姆龙计步器的计步显示,三者所计的最终步数均为209步。虽然现如今,计步器的计步算法已经日趋成熟[14]。但还是可以看出,上述所阐释的步态检测方法具有新颖性、可实用性,其精度也是十分高的。
3.2 惯导模块安置在腰部的测试结果
这一节,将惯导IMU模块安置在腰部进行测量。测量流程与脚部类似。但有所区别的是,腰部是在身体的主躯干上,不像脚,分左右。故采集出来的图像点会与前面脚部测量的数据点有所不同,而且当脚部静止的时候,身体的躯干其实并没有立即静止下来,而是经过一段时间的缓冲才静止下来,这也是不好捕捉到像脚部测量时那样的一长段静止点群的原因所在。图11为腰部测试示意图。
在MATLAB中导入腰部测量时的数据并编写程序进行仿真,最终其三条件下重叠的步态检测图,如图12所示。
图11 腰部测试示意图

图12 三条件下腰部重叠步态检测图
通过仿真,不难发现上图中并没有像脚部测量时那种较长且稳定的静态点群,而是呈现出“M”状的波浪形。下面,将C1条件下的波形图单拿出来放大,并进行分析,放大图如图13所示。

图13 腰部C1条件局部放大图
如图所示,13-1阶段,为腰部与脚后跟第1次接触地面时的临界静止状态,合成加速度幅值约等于g。之后13-3阶段,为脚跟至全脚掌接触地面时腰部的向下缓冲阶段。13-2中圈出来的点是完成脚跟过度为全脚掌结束的标志。之后便为屈膝的缓冲过程。接着13-4阶段,为换脚阶段,因为要有向前蹬脚的力,所以其中还是有个膝部和腰部向下缓冲和向上蹬腿的运动过程。最后的13-5阶段,便是完成换腿,直至另一只脚的脚跟触地,达到另一个新周期的临界静止状态的过程。上述的这几个阶段便组成了行人向前迈1步的整个过程,而且每个阶段,仿真图下方都有行人步态的示意图与之对应,图中行人腰部的圆点,如图13最下方的图例说明所示,代表的是测量时所用的IMU。分析过后,不难发现将IMU模块安置在腰部,不易检测出静止步态,绝对静止点更是难以捕捉。不过根据步态波形图特定的周期规律,统计出行人的步数还是可以做到的。根据C1条件的波形图来编写阈值滤波程序(腰部加速度合成幅值的阈值为th_waist=8.2)从而将其转化为矩形波形的仿真图。但发现C1条件的仿真图中,如图14圆圈所圈部分所示,此小段波形,本应被认为是实际的行进步态,但却由于测量原因,其采样值不满足所设的阈值条件,结果被阈值滤波虑掉了,因而此阶段应被归化为测试时的另类步态,统计步数时应把其补加上。最终,阈值滤波后的矩形仿真图如图15所示。
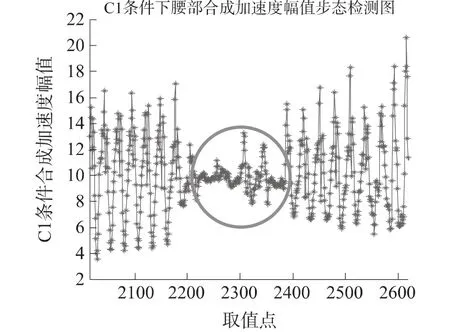
图14 合成加速度幅值较小时刻局部放大图

图15 阈值滤波后的矩形步态检测波形图
同脚部测量部分一样,按腰部测量时的计步规则统计上图中的高电平数(图15中的圈内部分所对应的就是图14中圆圈所圈的部分)。最终,通过编程所统计出的步数与真实测量时人为的统计结果以及和计步器所显示的步数结果进行比对,其三者完全一致,均为209步,说明上述腰部测试可以具有计步功能。但是由于无较长的静态阶段以及绝对静态点的难以捕捉,故不建议使用该方案来进行静止步态检测的工作。
3.3惯导模块安置在胸部的测试结果
胸部测试与腰部测试极为类似,均为躯干部的测量。测试示意图如图16所示。

图16 胸部测试示意图
仿照腰部测试和分析步骤,发现两者波形图相似,且C1条件下的波形图依旧成“M”波浪状。因此将IMU模块安置在胸部方案来进行人体步态静止状态的检测,仍然不推荐。但其波形图仍有周期规律可循,所以本测试依旧具有计步功能。最终通过程序编写所得到的步数统计结果为205步。同理,对照人为统计和计步器的显示,三者结果均为205步。因此也证明了此计步程序精准可靠。
4 结论
综合以上结果可知:将IMU模块安装在脚部、腰部和胸部均可统计出较为精准的步数。但是如果想要捕捉到较为稳定长时的静止步态阶段及绝对静止点来作为后期校正算法的触发条件。脚部方案是绝对要优于其他两种方案的。因为脚部的传感信息较为直接、准确,而腰部与胸部身处人体躯干部分,轻微的晃动都会影响最终的波形,而且牵扯到各阶段的缓冲及蹬地加速运动,静止点会一带而过不好捕捉。因此,如果后期要运用检测到的静止步态来触发行进过程中的各种校正算法,从而得到较为精确的实时定位信息,根据本文中的测试,推荐首选脚部方案。
[1]柴艳妹,夏天,韩文英,等.步态识别研究进展[J].计算机科学,2012,39(6):10-15.
[2]钟兴志,王晨升,刘丰,等.步态识别综述[J].SOFTWARE,2013,34(4):160-164.
[3]侯向峰,刘蓉,周兆丰.加速度传感器MMA7260在步态特征提取中的应用[J].传感技术学报,2007,20(3):507-511.
[4]钱伟行,朱欣华,苏岩.基于足部微惯性/地磁测量组件的个人导航方法[J].中国惯性技术学报,2012,20(5):567-572.
[5]张金亮,秦永元,梅春波.基于MEMS惯性技术的鞋式个人导航系统[J].中国惯性技术学报,2011,19(3):253-256.
[6]薛召军,靳静娜,明东.基于步态识别研究现状与进展[J].生物医学工程学杂志,2008,25(5):1217-1221.
[7]刘海涛.基于立体视觉的步态识别研究[D].合肥:中国科技大学,2010.
[8]胡荣.人体步态识别研究[D].湖北:华中科技大学,2010.
[9]翟艳东.基于步幅长度及频域特征的步态识别方法研究[D].河北:河北工业大学,2007.
[10]Jim'enez A R,Seco F,Prieto J C,et al.Indoor Pedestrian Navigation using an INS/EKF Framework for Yaw Drift Reduction and a Foot-Mounted IMU[J].IEEE,2010:135-143.
[11]谢波,江一夫,严恭敏,等.个人导航融合建筑平面信息的粒子滤波方法[J].中国惯性技术学报,2013,21(1):1-6.
[12]崔潇,秦永元,周琪,等.鞋式个人导航系统算法和试验研究[J].测控技术,2013,32(3):138-142.
[13]Rui Zhang,Fabian Höflinger,Leonhard Reindl.Inertial Sensor Based Indoor Localization and Monitoring System for Emergency Responders[J].IEEE Sensors Journal,2013,13(2):838-848.
[14]邢秀玉,刘鸿宇,黄武.基于加速度的小波能量特征及样本熵组合的步态分类算法[J].传感技术学报,2013,26(4):545-549.
李超(1990-),男,汉族,在读研究生,籍贯北京。2008~2012年,在北京信息科技大学读本科,专业为自动化; 2012至今,在北京信息科技大学读研究生,方向为微/纳机械传感器,主要从事惯性器件和高动态IMU研究,jackbeijing6747@sina.com;

苏中(1962-),男,汉族,教授,博士生导师,籍贯安徽。1979~1983年,北京工业学院自动化专业本科;1986~1989年,北京理工大学计算机控制硕士学位研究生;1994~1998年,北京真空电子技术研究所博士学位研究生。主要从事惯性器件、高动态IMU和组合导航的研究,suzhong2011@126.com;

朱嘉林(1965-),男,汉族,副教授,硕士生导师,云南石屏人。1993~1996年,云南大学物理系攻读硕士学位,凝聚态物理专业。1996~1999年,北京真空电子技术研究所攻读博士学位,物理电子学与光电子专业。1999~2001年,中科院物理研究所做博士后,从事凝聚态物理研究。2003~2004年,美国夏威夷大学地球物理研究所做博士后,从事凝聚态物理研究。主要从事信号处理与传感器及功能材料的理论和工艺研究,jlzhu@biti.edu.cn。
A Research about Zero Velocity Trigger Algorithm Used in the Wearable Autonomous Positioning Technology*
LI Chao,SU Zhong*,ZHU Jialin
(Beijing Key Laboratory of High Dynamic Navigation Technology,University of Beijing Information Science and Technology,Beijing 100101,China)
The so-called gait,is the posture of people’s trunk and legs when they are walking,as well as the status of the feetwhen they are touching the ground.And nowadays,the application ofthe related gaitcharacteristics technology has been developed quickly and had a wide range of applications in security systems,human-computer interaction,navigation,medical diagnosis and so on.And this paper willpropose a technology by three conditions method to implement the still gait detection of the wearable MEMS IMU(Inertial Measurement Units).Above technology which can use the detected the stationary state as a trigger condition applies to zero velocity correction,updating of the geomagnetic angle and the relevantstatic calibration techniques in positioning field.Thus the resultof the real-time and accuracy in the positioning process will be better.This paper will respectively place the IMU on the pedestrian’s foot,waist and chest to proceed the stationary gait testing.Final test data through the simulation shows that the detection stillresult of the case which place the IMU on the foot is much better than the other two cases.
wearable;MEMS IMU;still gait detection;the trigger of the zero velocity correction in positioning
TN384
A
1004-1699(2014)05-0627-06
10.3969/j.issn.1004-1699.2014.05.011
项目来源:北京市科技计划课题项目(Z131100005313009);国家自然科学基金项目(61261160497);北京市教委科技成果转化和产业化项目(PXM2013_014224_000074)
2014-03-04
2014-04-18
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中学生数理化·八年级物理人教版(2021年9期)2021-11-20
攀枝花学院学报(2021年5期)2021-10-19
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
山东工业技术(2018年5期)2018-03-10
大陆桥视野·下(2017年9期)2017-09-17
中老年健康(2016年11期)2017-02-05
中华骨与关节外科杂志(2016年3期)2016-05-17
恋爱婚姻家庭·养生版(2016年5期)2016-05-06
