虚拟样机技术在大型液压泥炮研发过程中的应用
2014-08-16 09:23石登仁尹忠俊卢臣智
冶金设备 2014年1期
石登仁 尹忠俊 董 然 卢臣智
(北京科技大学机械工程学院 北京100083)
虚拟样机技术在大型液压泥炮研发过程中的应用
石登仁①尹忠俊 董 然 卢臣智
(北京科技大学机械工程学院 北京100083)
借助虚拟样机技术,运用Solidworks建立了新型液压泥炮的虚拟样机模型,并将模型导入ADAMS软件对其进行运动学、动力学仿真分析,研究了关键点的运动轨迹及其速度变化,分析了主要零部件铰接点的受力大小和变化趋势。通过样机建模与仿真分析,为大型液压泥炮的合理设计和使用提供了可靠的依据,同时也缩短了开发周期,降低成本。
液压泥炮 回转机构 动态仿真 动力学分析 虚拟样机
1 引言
虚拟样机技术是二十世纪八十年代,随着计算机技术的发展而迅速发展起来的计算机辅助工程(CAE)技术。设计者可以在计算机上利用辅助工具建立各种设备的三维样机模型,根据所设计的产品工作环境和力能要求对模型进行动态性能分析,改进样机设计方案,用完全数字化形式的样机代替传统的实物样机进行实验与分析,可以简化机械产品的设计开发过程,缩短新产品的研发周期和提高产品的质量与性能。
随着国家节能减排的稳步推进,高炉向大型化发展,对高炉炉前设备提出了更高的要求。北京科技大学将虚拟样机技术引入到大型液压泥炮和开口机的研发过程中,建立泥炮和开口机的虚拟样机模型,进行运动学、动力学分析,评估设备的性能指标,不断完善产品。
2 机构组成及工作原理
研发的新型泥炮是由打泥机构、吊挂机构、回转机构、调整机构、斜底座、润滑及液压和电气控制系统组成。根据泥炮各零部件的实际尺寸以1∶1的比例运用三维建模软件SolidWorks建立主要零部件实体模型并进行装配,装配体如图1所示。工作时只需控制回转和打泥两个动作,倾斜对口及锁紧的功能由机构自动完成[1]。回转油缸在转臂之外,安装和维修都十分方便;矮转臂安装在斜底座上,和开铁口机同侧布置时,开铁口机可以在上方运行,大大降低了开口机的高度。回转机构是驱动液压泥炮动作的主要部件,包括回转油缸、连杆机构和转臂,在回转油缸的驱动下,通过连杆机构,使转臂绕固定中心转动。在打泥及闷炮的过程中,回转机构还起到提供压紧力和止退的作用。

图1 新型泥炮装配图
3 ADAMS建模与分析
3.1 ADAMS建模
根据泥炮各零部件的实际尺寸以1∶1的比例建立主要零部件实体模型并进行装配,保存成“.X_T”格式,导入ADAMS中进行机构仿真分析。对导入的模型构件和构件的属性(颜色、位置、名称和材料等)进行属性编辑,然后对各个构件按照实际工作需求添加约束和驱动,最后对模型进行验证[2]。建立的约束如表1所示。

表1 建模约束列表
为了真实的模拟泥炮的运行过程,通过软件本身提供的函数库和函数构建器(Functionbuilder)构建油缸的加速启动——平稳运行——减速制动的step速度函数:
step(time,0,0,2,-125)+step(time,2,0,12,0)+step(time,12,0,14,125)
3.2 动力学仿真分析
ADAMS求解模块ADAMS/Solver可以被ADAMS/ View自动调用,对模型进行仿真求解。经过计算,如果模型自由度为0,对其进行运动学仿真;如果模型自由度为大于或等于1,进行动力学仿真。
3.2.1 炮嘴的运动轨迹
泥炮除了需要满足在出铁场中的工作能力要求外,还要在靠近出铁口时有一段近似直线的运动轨迹,以便使炮嘴对准出铁口。为了获得炮嘴的运行轨迹,选择炮嘴前端的中心点,或者在炮嘴上建立一个标记点,然后追踪该点的运动轨迹即可得到炮嘴的运动轨迹,如图2所示,可以看出,炮嘴在接近出铁口时的运动轨迹(黑色线条)近似为一段直线,满足泥炮工作时靠近出铁口的运动轨迹的要求。泥炮上控制连杆的长度是可以通过螺纹调节的,当零部件因为磨损等原因使运动轨迹不能满足工作要求时,可以通过调整控制连杆的长度来修正水平方向的位置;同样也可以通过调整套杆来调节竖直方向的参数,使炮嘴对准出铁口。

图2 炮嘴运动轨迹
高炉的出铁场还有开铁口机、风口平台、撇渣器、铁水槽等其他设备,为了使各设备工作时不发生相互干涉,测知泥炮的工作范围是十分必要的[3]。为此,必须精确绘出泥炮最低点(炮嘴)和最高点(吊挂顶点)的三维曲线。从ADAMS导出最高点和最低点的三维坐标数据,以斜底座底面(安装面)为水平面(x-z平面),最靠近炮嘴的安装螺栓孔为原点,用Matlab软件绘出炮嘴运动三维曲线如图3所示,可以知道炮嘴的最低点在工作位置,最高点在停止位置,其他点的位置也可以从图3中依次读出。图3的坐标也是作为泥炮地面基座尺寸的重要参考依据。
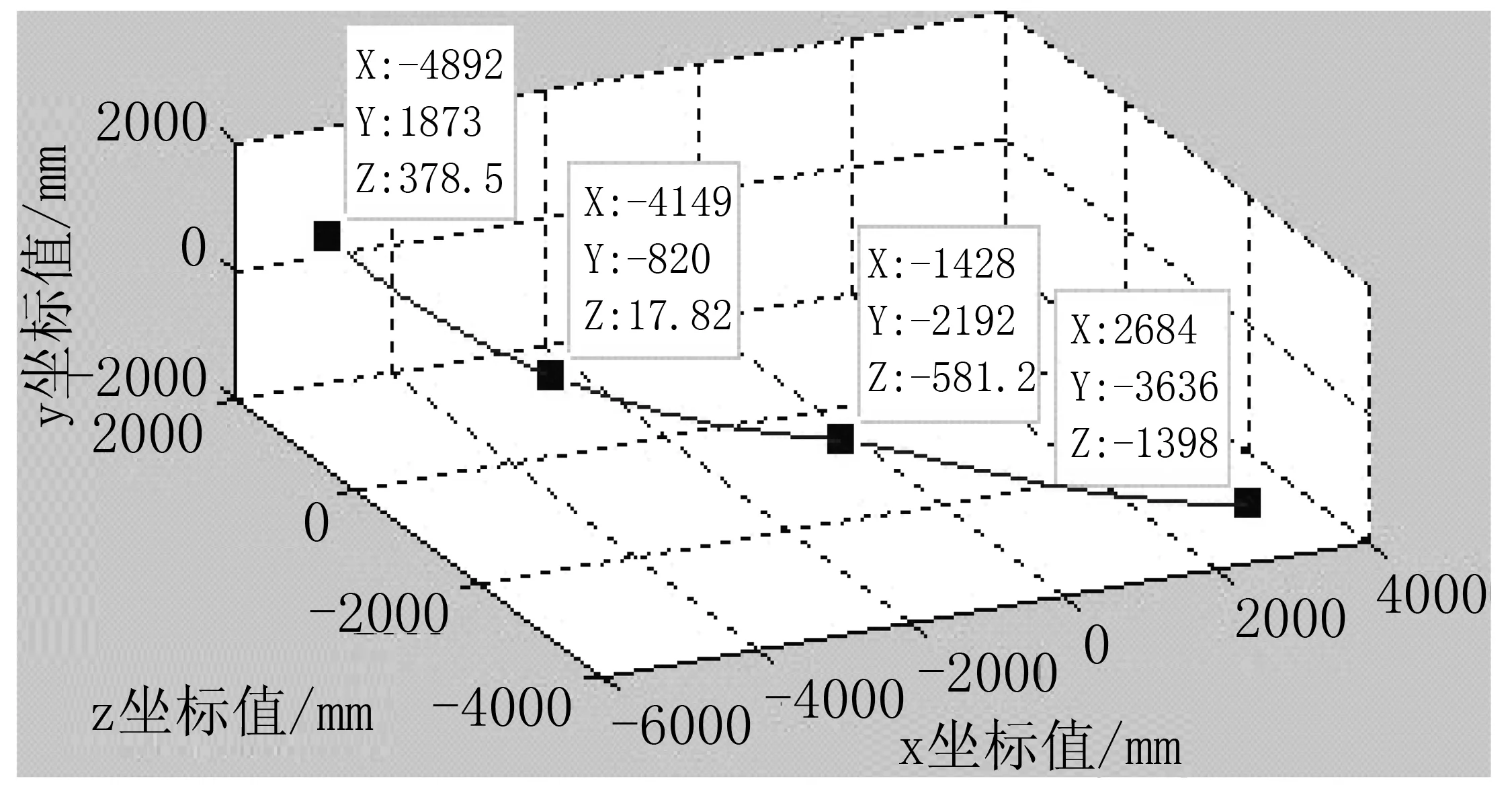
图3 炮嘴运动三维轨迹
吊挂机构的最高点也是整个泥炮在回转过程中的最高点,为了防止泥炮在运行过程中与风口平台、开铁口机(同侧布置)等设备相互干涉,用Matlab绘出的最高点三维曲线如图4所示。图4中最高点的为泥炮回转时最大高度。曲线上其他各点的数据值也可以一一读出,此曲线的数据可以作为风口平台和开铁口机设计和安装的一个重要参考。
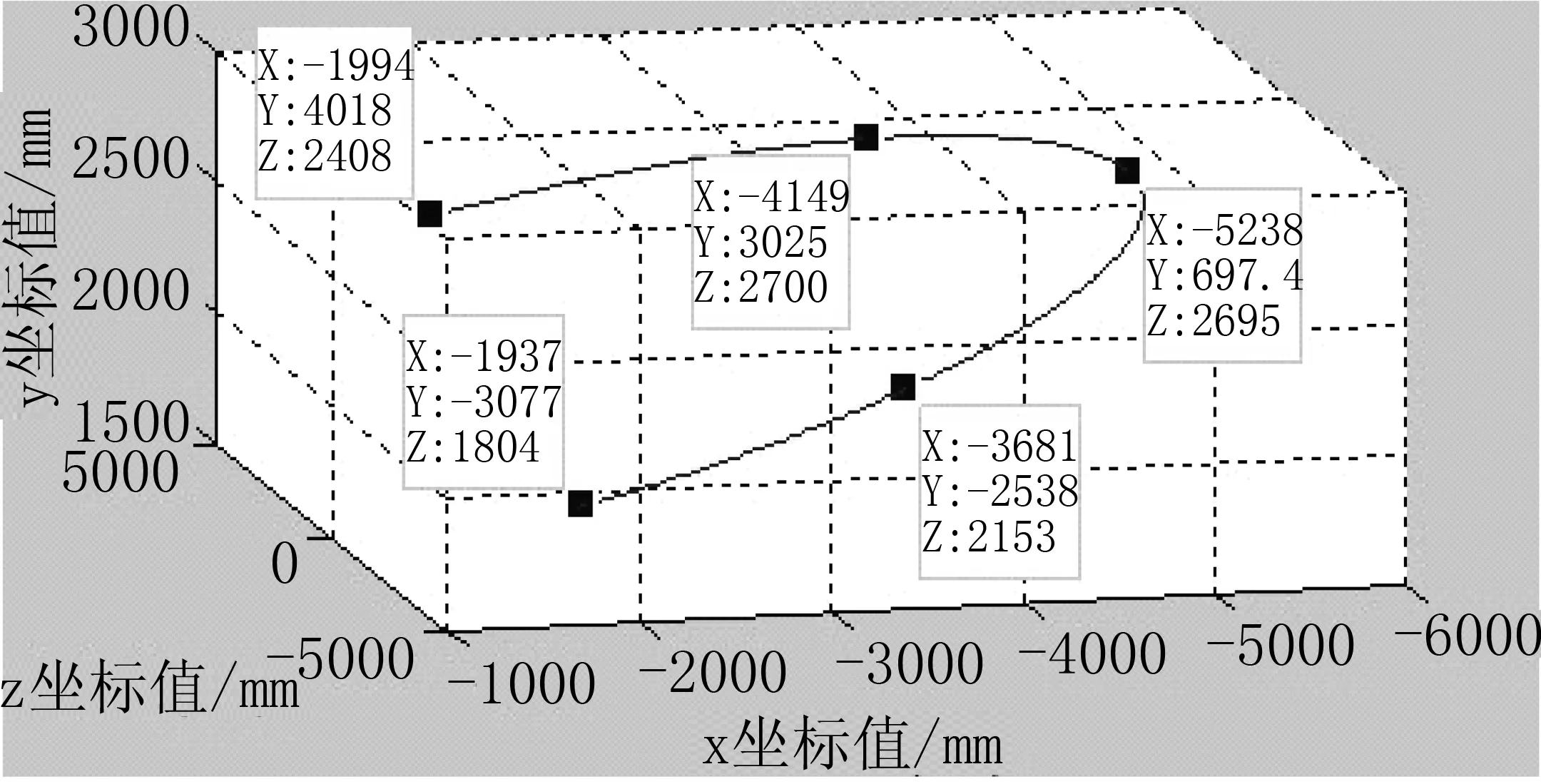
图4 吊挂最高点三维曲线
3.2.2 转臂的角速度和角加速度
泥炮旋转时是绕中心轴做定轴转动,因为炮身与转臂是泥炮的主要运动部件,它们的质量、转动惯量都很大,所以它们运行是否平稳是整个机构运行平稳的关键。通过考察转臂的角速度和角加速度,可以知道泥炮运行的稳定性[4]。转臂的角速度和角加速度如图5所示。
图5中实线为转臂的角速度,虚线为转臂的角加速度,可以看出,转臂的角速度大概在5秒时达到最大值,最大值约为15.2度/秒,并且转臂在旋转的加速启动和减速停止过程中存在轻微速度突变,转臂可以平稳运行,满足其工作要求。

图5 转臂质心的角速度和角加速度
3.2.3 各个铰链点的受力随转臂转角的变化关系
当转臂从工作位置旋转到非工作位置时,应该平稳进行,尽可能减小甚至消除速度突变引起的冲击和振动,存在冲击和振动时应该使冲击和振动保持在设备可承受的力能范围内[5]。这在提高设备工作的稳定性和延长设备寿命上有着举足轻重的作用。为避免零部件在泥炮回转过程中压溃或失效、超负荷运行,须分别考察各铰链点受力随转臂转角的变化。以转臂转角为横坐标,各铰链点的受力为纵坐标,分别绘制出各点的曲线图。

图6 回转液压缸受力随转臂转角的变化曲线
图6中虚线为油缸与肘板铰接点的受力随转臂的变化曲线,实线为活塞固定铰接点受力随转臂的变化曲线。由图6可以知道在转臂回转过程中回转液压缸上两铰接点的受力变化趋势相同,没有出现异常的尖峰载荷,在启动和制动过程中有轻微惯性冲击和振动,在制动终了时受力达到极值,大小为2.1×105N。
图7中实线为肘板固定铰接点的受力曲线,虚线为肘板与连杆的铰接点受力曲线,点划线为肘板与回转油缸铰接点的受力曲线。由图7可以知道在转臂回转过程中肘板上三个铰接点的受力较为平稳,在启动和制动过程中同样有轻微惯性冲击和振动,在制动终了时三个点受力达到极值,其中固定铰接点的最大,大小为4.7×105N。
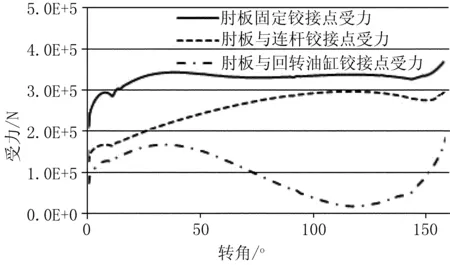
图7 肘板三个铰接点受力随转角的变化曲线

图8 转臂上三个铰接点受力随转角的变化曲线
图8中虚线为转臂与连杆铰接点的受力随转臂的变化曲线,实线为转臂固定铰接点受力曲线,较平直点划线为转臂与吊挂机构铰接点的受力曲线,可以看出在转臂回转过程中转臂与吊挂机构的受力很小而且几乎没有变化,大小始终保持在5.7×104左右。转臂上其他铰接点在启动和制动过程中存在较小的载荷变化,与连杆铰接的点受力最大,最大值出现在转臂停止运行时刻,大小为3.1×105N。
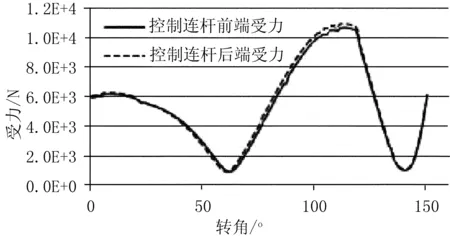
图9 控制连杆受力随转角的变化曲线
因为控制连杆可视为二力杆,所以两端铰接点的受力几乎完全相同,所以得到的是两条几乎重合的曲线。由图9可以知道在转臂回转时控制连杆受力很小,最大值不超过1.2×104N。
由图6~图9可以知道,给泥炮施加的驱动是匀加速启动——平稳运行——匀减速制动时,在开始启动和制动停止阶段均有轻微的速度变化和冲击,可能造成设备的振动,影响设备工作的平稳性和降低设备的工作寿命,为此,设计回转油缸时,在启动和制动阶段均添加了液压缓冲器,消除了启动和制动的冲击和振动。
综上可知,所设计的新型大高炉泥炮在回转过程中运行平稳,具有较好的工作稳定性,各个铰接点的受力峰值都远小于设备的设计能力,而且泥炮回转是空载运行,受力情况对泥炮的稳定运行和工作能力、使用寿命并无较大影响。
3.3 传力特性分析
油缸驱动肘板转动,再由肘板带动转臂旋转,由铰链四杆机构实现,通过分析该机构的传动角可以有效的反映机构的传力特性。通常,对于高速大功率机械的传动角要≥50°,对于一般机械也需要≥40°。一个转炮工作形成内传动角的变化曲线如图10所示。由图10可以看出最小传动角大概为42.3°,达到传动角≥40°的设计要求,并且传动角逐渐增大,证明该机构传力特性良好。

图10 传动角随时间的变化曲线
4 结论
通过Solidworks 和ADAMS软件,建立了大型液压泥炮的虚拟样机模型,并对其轨迹进行了仿真,研究了泥炮在工作状态和回转过程中各个铰接点的受力变化,可以得出以下结论:
1)新型全液压泥炮结构简单、紧凑,机构高度较小,炮嘴轨迹调整简单方便,工作性能可靠。
2)液压泥炮满足大型高炉的工作能力和工艺要求,而且便于安装、拆卸和维护。
3)炮嘴在靠近出铁口时走一段近似直线的行程,并且运行平稳。
4)泥炮在回转过程中各个铰链点在启动和制动时运行平稳,冲击小,受力峰值均远小于泥炮的额定载荷。泥炮具有较好的工作稳定性和较高的使用寿命。
[1]朱允言,高泽标.液压泥炮旋转杆机构的参数分析[J].北京科技大学学报,1990(2):6-10.
[2]陈德民.精通ADAMS2005/2007虚拟样机技术[M].北京:化学工业出版社,2009:40-52.
[3]尹忠俊,徐明,张永锋等.开铁口机旋转机构的参数化研究[J].冶金设备,2005(1):40-42.
[4]李朔东,殷宝铎.液压泥炮旋转机构的运动特性分析[J].冶金设备,2010(5):32-34.
[5]张峰,尹忠俊,金玲等.基于虚拟样机技术的椭圆振动筛仿真分析[J].冶金设备,2009(2):38-41.
Application of Virtual Prototyping Technology in the Development of Large Hydraulic Clay Gun
Shi Dengren Yin Zhongjun Dong Ran Lu Chenzhi
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083)
Build virtual prototyping model of a new type of hydraulic clay gun by the virtual prototyping software solidworks and is imported into ADAMS to analyze its kinematics and dynamics. The trajectory and speed change of key point is researched and then analyzed the size of the force and variation trend of hinge points in main components. This paper provides a reliable theoretical basis on rational design and use of large hydraulic clay gun through the prototype modeling and simulation analysis. And thus can shorten the development cycles and reduce the cost.
Hydraulic clay gun Rotary mechanism Dynamic simulation Kinetic analysis Virtual prototyping
石登仁,男,1984年出生,毕业于北京科技大学,硕士研究生,主要研究方向为机械系统动力学分析
TF321.5 TP391.9
A
10.3969/j.issn.1001-1269.2014.01.010
2013-09-15)
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
山东冶金(2020年6期)2021-01-04
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
轮胎工业(2020年2期)2020-03-01
中国棉花(2017年10期)2017-11-04
现代冶金(2016年6期)2016-02-28
新疆钢铁(2015年4期)2015-12-25
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28