一种基于坐标变换的感应电机转子断条故障诊断新方案
2014-08-09 01:52:54尚兆霞
电机与控制应用 2014年12期
辛 峰, 尚兆霞
(山东省产品质量检验研究院,山东 济南 250100)
0 引 言
三相感应电动机因其结构简单、使用方便、成本较低、维护工作量小等优点在工业生产中得到广泛的应用。电动机故障诊断是指早期故障检测和评判,以避免故障的恶化,从而有效避免电机失效以及高额的维修,保证电机有效运行,避免由其带来的经济损失。感应电机转子断条故障占电动机故障的10%左右[1],故对感应电机转子断条故障的研究诊断具有重要的意义。
由于定子电流信号易于获得,通常将定子电流作为电机故障诊断的主要依据。基于电流检测的传统故障诊断方法是将定子电流信号采样后进行频谱分析,用以寻找是否存在故障对应的特征频率,进而判断是否存在某种故障[2]。由于定子电流的频谱复杂,特征频率成分不明显,且与基频接近从而影响到该方法的实用性。扩展的park’s矢量法[3]将基频成分转化为直流分量,可以突出特征频率。但该方法导致各特征频率相互作用,产生新的频率,导致频谱复杂化,加重了诊断的难度,同时该方法没有明确的物理意义。电流Hilbert模量频谱分析法[4]同样引入了平方运算,容易出现特征频率成分相互作用,增加故障识别难度。基于双PQ变换法[5]提出的故障严重程度因子需要检测电机故障的空载点,因此不能及时判断出在运行时的电机发生故障的故障严重程度。
本文采用坐标变换的方法,将三相定子电流产生的旋转磁动势用电流矢量的方式表示,并基于不同坐标系而转化为不同的表现形式,由此进行故障诊断。首先将三相坐标系转变为两相静止坐标系,得出电机park矢量图,进行电机转子断条的初步诊断。为得到电机故障严重程度,再将两相静止坐标变换为两相旋转坐标系,由此推导得出电机的故障程度因子,由该坐标系下电流矢量图得出电机转子断条故障及其故障程度。最后,通过样机的试验验证这一方法的正确性和有效性。
1 不同坐标系下感应电机电流矢量
1.1 两相静止坐标系下电机电流矢量
以产生同样的磁动势为基准,将三相坐标系下的三相交流绕组电流iA、iB、iC变换到两相静止坐标系下的电流iα、iβ,变换过程如图1所示。其算式可表达为
(1)

图1 三相和两相绕组的交换过程
电机正常工作时,其三相定子电流表示为
iA=Imcos(ωt)
iB=Imcos(ωt-120°)
iC=Imcos(ωt+120°)
(2)
式中:Im——相电流最大值;
ω——电流角频率。
由式(1) 、式(2) 可知,电机正常工作时在两相静止坐标系下的电流iα、iβ分别表示为

(3)
空间电流矢量表示为

(4)
式中is可表达为
(5)
为保证在理想和故障情况下都能计算出角度,采用
(6)

(7)

实际上,由于电机的制造、安装、材料等原因,正常交流感应电机的park矢量图只能接近于圆,当电机转子发生故障时,会使park矢量图发生变化,通过变换得到park矢量图再与正常电机park矢量图进行比较分析便可对电机故障进行初步的诊断。
1.2 两相旋转坐标系下电机电流矢量
从静止的三相变换到静止两相坐标系,再将静止的两相变换为同步旋转的两相坐标系,如图2所示,便可得
(8)
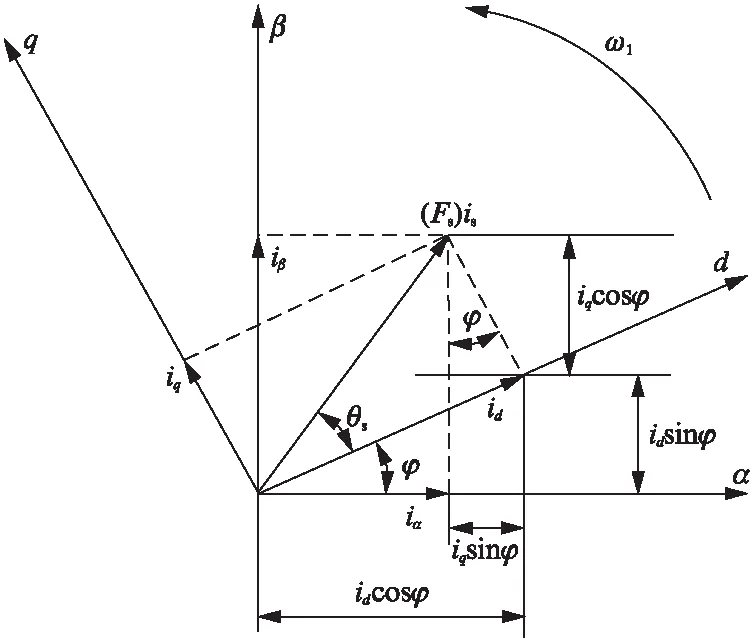
图2 两相静止到旋转坐标系的空间矢量图
在两相旋转坐标系下空间电流矢量为

(9)
式中,is、θ求法如式(5)、式(7)所示。
2 断条故障时不同坐标系下的电流矢量
2.1 断条故障时静止坐标下的电流矢量
当电机转子存在断条故障时,定子电流的特征频率成分为[6](1±2ks)f1。其中:f1为电网电压频率;s为异步电动机的转差率;k为正整数。


(11)
(12)
式(12)表明,在电机发生故障时,其在两相静止坐标系下的park矢量图不再是圆,其会发生畸变,故障产生的电流越大,畸变越严重,由此可以初步判断电机的故障。
2.2 断条故障时两相旋转坐标下的电流矢量
断条故障时,在两相旋转坐标系下由式(7)和式(11)可知电流为
(13)
两相旋转坐标系下电流矢量为
I=id+jiq=iseθ
(14)
为方便分析计算,将式中is用矢量模的平方is2表示,即
I1+2s2+I1-2s2]+3ImI1+2scos(2sωt-
φ1+2s)+3ImI1-2scos(2sωt+φ1-2s)+
3I1+2sI1-2scos(4sωt-φ1+2s+φ1-2s)
(15)
忽略最后一项得
(16)
式中:a=I1-2ssinφ1-2s-I1+2ssinφ1+2s;
b=I1-2scosφ1-2s+I1+2scosφ1+2s;

θ可由下式求得

(17)
式中:c=I1-2ssinφ1-2s+I1+2ssinφ1+2s;
d=I1+2scosφ1+2s-I1-2scosφ1-2s;

由式(16)和式(17)可以知,电机断条故障后,在旋转坐标系下电机空间矢量电流不再是一个点,而是一定发散的点集。
当电机发生某一断条故障时,其矢量模方is2和相角度θ会有一定的周期性变化。定义
(18)
为故障程度因子,通过比较求解在一定周期内的θ的最大值θmax及式(18)所给出的故障程度因子来判断电机故障的严重程度。
3 仿真与试验结果分析
本文通过对某笼型电动机进行试验,分别得出试验电机在负载情况下一根断条和三根断条故障的电流数据,并转化为两相旋转坐标系和两相
静止坐标系下的park矢量图。图3为电机正常运行时三相定子电流分别在两相静止坐标系和两相旋转坐标系下电流矢量图。图4为电机转子一根和三根断条故障时在两相静止坐标系下的电流矢量图。图5为电机转子一根断条和三根断条故障时在两相旋转坐标系下的电流矢量图。图6(a)是在两相旋转坐标系下电机在正常工作、转子出现一根断条故障、转子出现三根断条故障情况下的电流矢量的θmax值,图6(b)是在两相旋转坐标系下电机在正常运行、转子出现一根断条、转子出现三根断条情况下故障程度因子k的值。


图3 电机正常运行时的电流矢量图
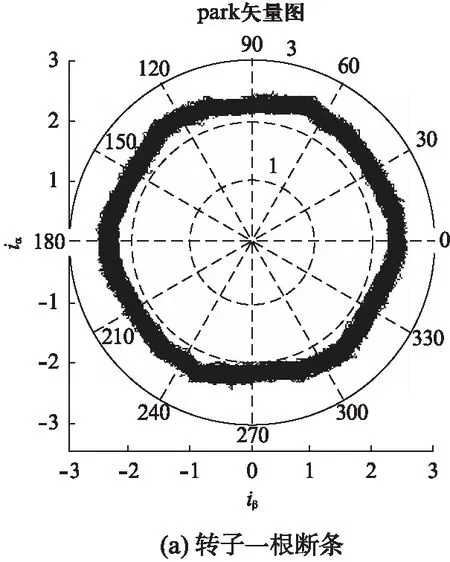

图4 两相静止坐标系下定子电流矢量图
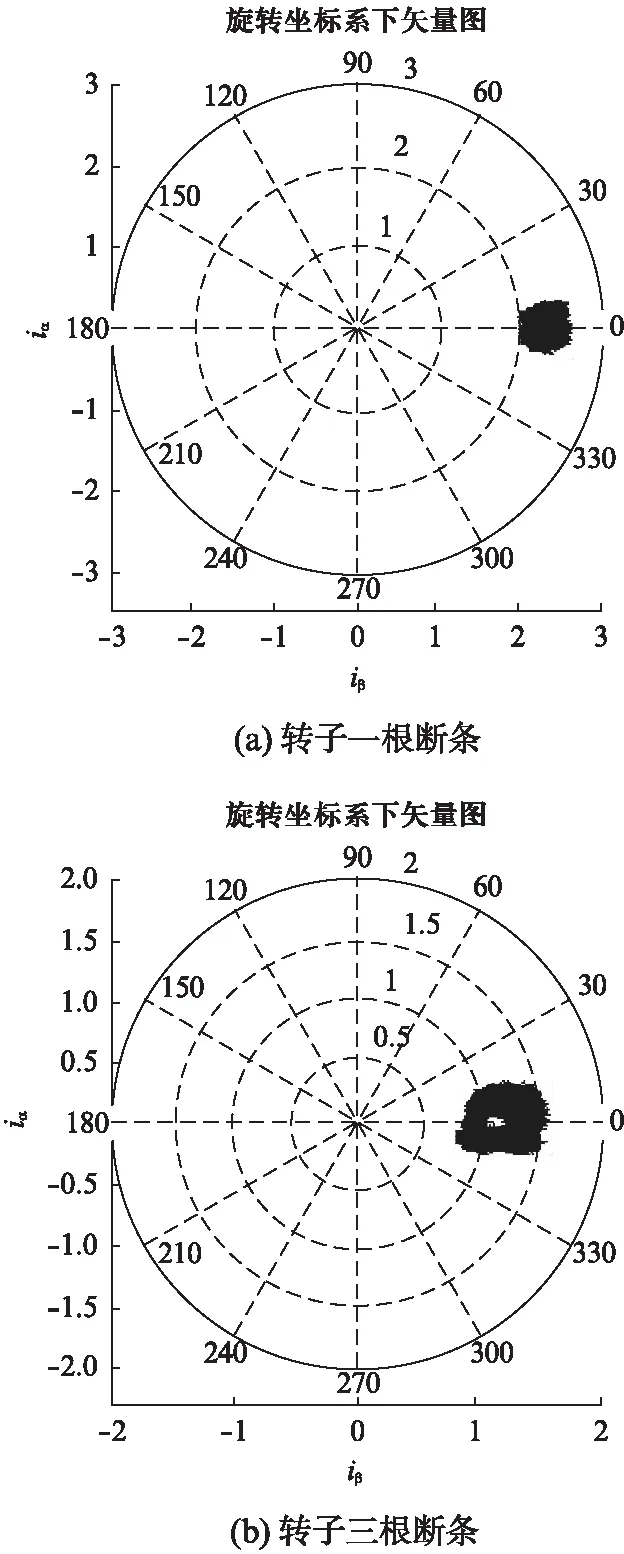
图5 两相旋转坐标系下定子电流矢量图
由图4、图5可知,在相同坐标系下,转子正常工作及发生转子断条时电流矢量图差异较大。通过与电机正常时的电流矢量图比较可初步判断出电机转子断条故障,但通过图形较难量化得出电机故障的严重程度。
由图6(a)可知,在两相旋转坐标系下,电流矢量相角θ的最大值θmax和故障程度因子k与电机转子断条故障严重程度(电机转子断条根数)基本呈线性的关系。说明电流矢量的相角θ的最大值θmax和式(18)定义的k作为电机故障严重因子是可行的。
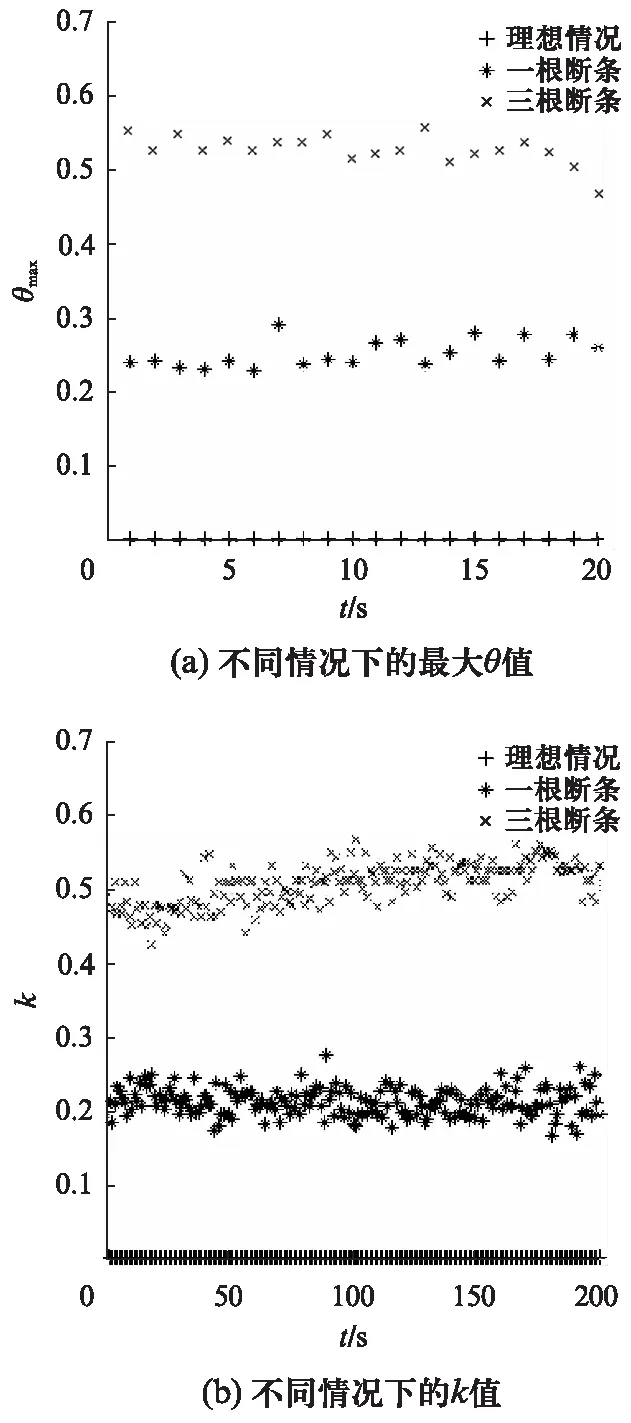
图6 故障程度因子
4 结 语
本文通过坐标变换,利用电机三相定子电流在不同坐标系下的电流矢量图,可初步判断出电机转子断条故障以及电机故障的严重程度,为电机故障诊断提供了定量的依据。样机的试验结果验证了方案的有效性。
【参 考 文 献】
[1] CRUZ S M A, CARDOSO A J MA. Stator winding fault diagnosis in three-phase synchronous and asynchronous motors, by the extended park’s vector approach [J]. IEE Trans on Industry Applications, 2001,37(5): 1227-1233.
[2] 刘振兴,张哲,尹项根,等.一种新型的笼型异步电动机转子故障在线监测和诊断方法[J].电工技术学报,2002,17(4): 89-92.
[3] 侯新国,吴国正,夏立.基于park矢量模平方函数的异步电动机转子故障检测方法研究[J].中国电机工程学报,2003,23(9): 137-140.
[4] 刘振兴,尹项根,张哲,等.基于Hilbert模量频谱分析的异步电动机转子故障在线监测与诊断方法[J].中国电机工程学报,2003,23(7): 158-161.
[5] 黄进,牛发亮,杨家强.基于双PQ变换的感应电机转子故障诊断[J].中国电机工程学报,2006,26(13): 135-140.
[6] 沈标正.电机故障诊断技术[M].北京:机械工业出版社,1996.
[7] 蒋建东,蔡泽祥.用park变换方法检测感应电动机转子故障[J].电力自动化设备,2004,24(5): 55-60.
猜你喜欢
长江大学学报(自科版)(2022年1期)2022-02-25 03:24:24
防爆电机(2021年1期)2021-03-29 03:02:46
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
测控技术(2018年2期)2018-12-09 09:00:52
教育教学论坛(2017年34期)2017-08-30 10:32:04
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年14期)2014-04-04 11:53:30
电力工程技术(2014年1期)2014-03-20 14:19:06