
一种顾及影像间位置关系的拼接路径规划方法
2014-08-05 05:32周志诚
测绘通报 2014年10期
周志诚,张 勇
(1.湖北省航测遥感院,湖北武汉 430074;2.武汉大学遥感信息工程学院,湖北武汉 430079)
一种顾及影像间位置关系的拼接路径规划方法
周志诚1,张 勇2
(1.湖北省航测遥感院,湖北武汉 430074;2.武汉大学遥感信息工程学院,湖北武汉 430079)
一、引 言
影像镶嵌是指将多幅空间上有重叠关系的影像拼接在一起,裁切掉影像间重叠的部分,生成一幅更大范围的影像的处理过程,它是正射影像产品生产过程中的一个主要环节。对于传统大范围航空影像的拼接问题,潘俊以正射影像为研究对象,提出了在顾及重叠的面Voronoi图基础上自动生成初始的接缝线网络,然后利用重叠区的影像内容对初始的接缝线网络进行优化的方法,较好地解决了正射影像的拼接问题[1]。孙明伟提出了利用蚁群算法精化拼接线[2],能够自动绕过建筑物等投影差大的地物,取得了较好的效果。近年来,以轻型机和无人机为代表的低空遥感平台得到了迅猛的发展,在各类应急突发事件的测绘保障中发挥了重要作用。这类应用的特点是突发性强,并且通常伴随恶劣的气象及地面条件[3],在这种条件下,低空遥感平台获取的影像具有重叠度不稳定、拓扑关系复杂的特点[4]。因此,拼接线自动选择也将面临复杂的影像拓扑关系。本文以像主点距离最优为原则,提出了顾及影像间位置关系的拼接路径规划算法。该算法理论简单,易于编程实现,具有较好的适应性,能够解决复杂拓扑条件下的拼接线自动规划问题。
二、以像主点距离最优为原则的拼接路径规划方法
低空遥感平台受飞行器搭载能力的限制,通常采用家用数码相机作为成像传感器。这类传感器一般存在较大的畸变,且畸变随着离像主点距离的增大而增大。因此,在影像镶嵌过程中,应尽量采用像主点附近变形较小的影像,这是本文提出的像主点距离最优原则的基本假设条件。
低空遥感影像在经过几何处理后,已经将影像纠正到某个坐标系下,对于正射影像图制作来说,这个坐标系通常为大地坐标系。图1(a)所示为一个无人机飞行区的影像分布情况。图中,A、B、C、D为经过几何纠正的无人机在4个不同位置拍摄的4幅影像,虽然经过几何纠正以后,它们被规划到同一个坐标系下,但是由于拍摄位置的不同导致影像中阴影、反光等存在差别,如果不考虑这些因素直接将它们合并到一起则会出现虚影。目前通常的做法是通过拼接线(也称为镶嵌线)将影像的重叠区进行裁切,每一幅影像对应一个封闭的区域,区域和区域之间相互邻接但不重合。图1(b)所示为拼接线所构成的封闭区域,区域内所对应的影像数据会写入最终的拼接结果中,拼接线与影像边界恰好构成了影像所对应的封闭面,面内的像素需要写入到镶嵌结果影像中。
1.像主点距离最优原则的拼接线网络生成方法
最近主点法拼接线网络生成方法的基本思想是利用中心投影影像中像主点附近影像质量最高、变形最小这一特性按照距离最优原则生成拼接线网络。像主点为物镜主光轴与像平面的交点,从理论上来说,在几何纠正之前整张影像内部只有像主点对应的像素是没有变形的,其余像素的变形随与像主点距离的变大而变大。经过正射纠正处理后,中心投影所导致的变形虽然会得到改正,但是高出地面的地物所造成的投影差是不能被改正的。考虑到无人机在拍摄影像时通常是近似垂直摄影,因此地物的投影差也会随着与像主点距离的变大而变大,因此无论是从成像方式还是投影差来说,像主点附近的影像是质量最好的部分。图2所示为最近主点法拼接线网络生成方法的生成过程。

图1 影像间位置关系与拼接线示意图
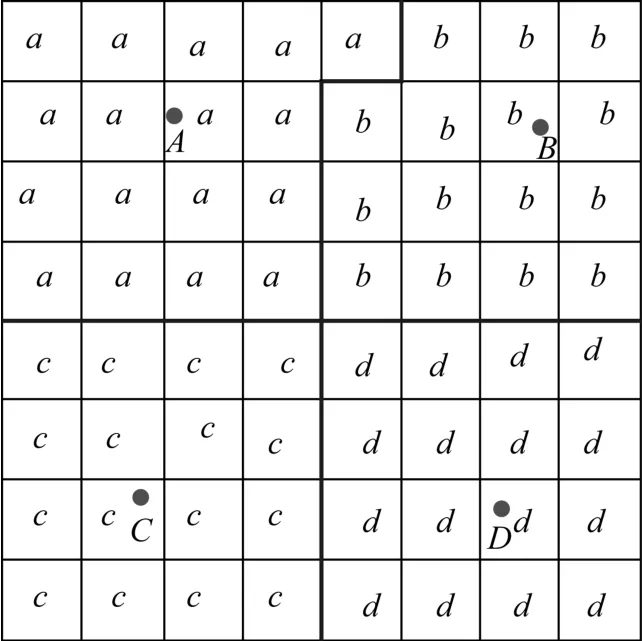
图2 最近主点法拼接线网络生成方法示意图
图2中,●为影像中心点,分别表示A、B、C、D影像的中心坐标,网格范围为4张影像最大范围的矩形外包,按照m×m大小等比例分割,本文取m=64像素。单元格中的字母表示与当前单元格中心距离最近的影像中心点所对应的影像,黑色线为本文方法生成的拼接线。具体计算过程如下:
1)计算影像中心点坐标及影像集合的外包矩形,并将矩形范围对齐到整像素。
2)按照m×m格网间距及影像的空间分辨率将外包矩形分割成固定大小的单元格,并计算单元格中心坐标。
3)逐单元格计算当前单元格中心点离各个影像中心点的距离,并记录距离最小的影像索引。
4)聚合索引相同的单元格,聚合面的边界就是拼接线,聚合面对应的范围就是影像需要写入目标影像的范围。
本文提出的拼接线网络生成方法原理简单,计算速度快,适应性和稳定性高,当m=1时等价于基于重叠区骨架线法生成的拼接线。对于无人机影像来说,重叠区大且重叠关系复杂,这一方法的优势就更加明显,瞬间即可生成整个区域的拼接线网络。
2.拼接线网络求精
由于无人机的飞行方向与大地坐标系的x轴或y轴存在一定的偏差,因此生成的正射影像四周通常会存在一定数量的背景色,当航线是45°斜飞时,背景色面积最大。上节所描述的拼接线网络生成方法只考虑了影像之间的位置关系,并没有顾及影像内容本身,如果拼接线落到了背景色区域内,就可能会造成背景色参与到拼接中,导致拼接结果中存在空洞。为了消除这一问题,需要对拼接线网络进行求精。
本文用前景和背景来描述影像的有效区和无效区。考虑到背景色只会出现在正射影像的四周,故采用多边形来描述前景的边界。首先通过背景探测算法获取影像的背景色,其次利用边缘跟踪算法获取影像的前景边界线,再次利用光栏法矢量压缩算法剔除边界线中多余的顶点,最后利用边界线精化上节生成的拼接线网络。
1)背景探测算法是基于背景色位于影像四周这一基本假设条件来设计的。取m×m(本文取m=5)的探测窗口,让探测窗口沿影像边缘绕行一周,当窗口内的像素是纯色时,记录此纯色的值并累积对应的计数。绕行一周以后,统计纯色窗口的计数,如果某一纯色对应的计数占总计数的90%以上,则认为探测到了影像背景色,否则作为无背景色处理。
2)利用基于优先搜索方向的边界跟踪算法[5]及步骤1)检测到的背景色跟踪前景的边界。从影像左下角开始,自下而上、从左到右逐像素与背景色灰度值进行比较,当发现第1个非背景色像素时认为是前景边界的开始,以这个点作为起始点,在4邻域或8邻域内寻找非背景色点。总体扫描方向是自下而上,因此第1个点对应于边界最下面点或是最下面一行的第1个点,如果按照4邻域搜索,那么第2个非背景色点只可能出现在第1个点的右方或上方。如果第1个点的右方为非背景色点,那么这个点就是第2个点,如果第1个点的右方为背景色而上方为非背景色,则上方点为第2个点,否则发现的该前景区域为单像素区域,将此像素赋值为背景色,重新搜索第1个非背景色点。然后以第2个点为当前点,以第1个点为前一个边界点,共同确定下一个点,设定当前点和上一个点确定的方向为基准方向,以基准方向的外法线方向为优先方向在当前点的4邻域范围内寻找第3个点,从优先方向开始逆时针搜索到的第1个非背景色点就是第3个点。接着以第3个点为当前点,以第2个点为上一个点,重新计算优先方向并搜索第4个点。如此反复直至下一个点与第1个点重合。
3)步骤2)得到的前景色边界是一个由栅格坐标组成的矢量边界,边界的顶点数目众多,这对后面的多边形与拼接线网络求交会带来不利影响,因此需要利用矢量压缩算法删除多余的顶点,本文选用光栏法[6]进行压缩。光栏法矢量压缩的基本思想是定义一个扇形区域,通过判断曲线上的点在扇形外还是在扇形内,确定保留还是舍去。如图3所示,设曲线上的点列为{pi,i=1,2,…,n},光栏口径为d,可根据压缩量的大小自定义(本文取d=12像素),则光栏法的实施步骤可描述为:
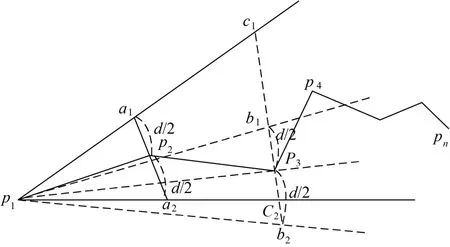
图3 光栏法矢量压缩示意图
a.连接p1和p2点,过p2点作一条垂直于p1p2的直线,在该垂线上取两点a1和a2,使a1p2=a2p2=d/2,此时a1和a2为光栏边界点,p1与a1、p1与a2的连线为以p1为顶点的扇形的两条边,这就定义了一个扇形。
b.若p3点在扇形内,则舍去p2点,然后连接p1和p3,过p3作p1p3的垂线,该垂线与前面定义的扇形边交于c1和c2。在垂线上找到b1和b2点,使p3b1=p3b2=d/2,若b1或b2点落在原扇形外面,则用c1或c2取代之(假定用c2取代b2)。此时用p1b1和p1c2定义一个新的扇形。
c.检查下一顶点,若该点在新扇形内,则重复步骤b,直到发现有一个顶点在最新定义的扇形外为止。
d.当发现点pn在扇形外时,保留pn-1点,以pn作为新起点,重复步骤a―步骤c。如此继续下去,直到所有顶点检测完为止。所有被保留的顶点(含首、末点),顺序地构成了新的矢量边界。
将影像的有效区域边界与前一节生成的拼接线网络套合在一起,逐格网判断单元格4个顶点是否完全处于其对应影像的有效边界范围内。若不是,则以次优距离重新计算此单元格所对应的影像索引,重复判断单元格4个顶点与影像有效边界的位置关系。如此重复直至单元格落于某一影像边界内。若遍历完所有影像仍然没有找到满足条件的影像索引,则将单元格进行拆分(一分为四),分别用最短距离法计算4个小单元格的影像索引,并进行本步骤的判断处理,直至所有单元格及拆分出的小单元格满足完全处于对应影像的有效范围内或单元格的尺寸小于4像素×4像素。
三、试验结果与分析
图4为丘陵地区的拼接结果图,采用佳能5D Mark II相机拍摄了513张影像,由植被、城镇、农田、山地、裸露地等地貌组成,利用本文算法提取的拼接路径,可自动完成影像拼接,拼接结果目视效果良好。

图4 镶嵌效果图
四、结束语
本文所提出的拼接线规划算法顾及了影像间的重叠关系,在复杂拓扑条件下仍然能够得到稳定的结果,且算法简单,易于实现。试验结果表明,此方法适合处理无人机等低空遥感平台获取的影像的拼接问题。
[1]潘俊.自动化的航空影像色彩一致性处理及接缝线网络生成方法研究[D].武汉:武汉大学,2008.
[2]孙明伟.正射影像全自动快速制作关键技术研究[D].武汉:武汉大学,2008.
[3]王玉宏.低空遥感影像匹配与拼接技术研究[J].测绘信息与工程,2009,34(2):47-48.
[4]何磊.无人机遥感图像及其三维可视化在汶川地震救灾中的应用[J].物探化探计算技术,2010,32(2):206-210.
[5]柳稼航.一种基于优先搜索方向的边缘跟踪算法[J].遥感技术与应用,2004,19(3):209-213.
[6]徐新.增强型矢量数据压缩算法的设计与实现[J].计算机应用研究,2007,24(12):393-395.
On Mosaicing Path Planning Using Position Relationship between Images
ZHOU Zhicheng,ZHANG Yong
以低空遥感平台获取的影像为研究对象,针对快速正射影像图的制作需求,提出一种顾及影像间位置关系的拼接路径规划算法。以像主点距离最优为约束条件,能够在复杂拓扑关系条件下规划出空间关系上最优的拼接路径,满足低空遥感影像的快速拼接要求。
影像拼接;拼接路径规划;自动镶嵌
P237
B
0494-0911(2014)10-0086-03
2013-07-17
周志诚(1974―),男,湖北汉川人,高级工程师,研究方向为摄影测量与地理信息。
周志诚,张勇.一种顾及影像间位置关系的拼接路径规划方法[J].测绘通报,2014(10):86-88.
10.13474/j.cnki.11-2246.2014. 0336
猜你喜欢
小学生学习指导(高年级)(2021年11期)2021-11-30
学校教育研究(2021年11期)2021-07-22
电脑爱好者(2021年8期)2021-04-21
数学大王·趣味逻辑(2020年6期)2020-06-22
数学大王·趣味逻辑(2020年5期)2020-06-19
艺术启蒙(2020年5期)2020-06-09
———《扇形的认识》教学廖
小学教学设计(数学)(2018年10期)2018-10-20
西部皮革(2018年6期)2018-05-07
中华老年口腔医学杂志(2016年3期)2017-01-15
中国卫生标准管理(2015年25期)2016-01-14
