直接占空比扰动的新型光伏自适应爬山法
2014-08-02 03:54方波李明康龙云
电力系统及其自动化学报 2014年9期
方波,李明,康龙云
(1.许昌学院电气信息工程学院,许昌461000;2.华南理工大学电力学院,广州510640;3.广东省绿色能源技术重点实验室,广州510640)
直接占空比扰动的新型光伏自适应爬山法
方波1,2,李明1,康龙云2,3
(1.许昌学院电气信息工程学院,许昌461000;2.华南理工大学电力学院,广州510640;3.广东省绿色能源技术重点实验室,广州510640)
为了改进光伏发电最大功率点跟踪的控制性能,通过光伏阵列建模和全桥变换器稳态建模,对直接占空比扰动控制模式进行了原理分析,建立了光伏功率、电压和占空比之间的定量函数关系,给出了直接占空比扰动控制的控制机理,并以此为依据,提出了一种新型变步长自适应爬山法控制策略。采用PSIM仿真平台对基于直接占空比扰动的自适应爬山法的光伏发电系统进行了仿真,对比仿真实验结果验证了新型自适应爬山法的有效性和优越性。
光伏;直接占空比扰动;自适应爬山法;最大功率点跟踪;仿真
太阳能光伏发电是新能源发展的主要方向之一。在光伏发电系统中,为了提高系统的整体效率,一个重要的途径就是对光伏输出进行最大功率点跟踪MPPT(maximumpowerpointtracking)控制。MPPT控制策略有恒定电压法、扰动观察法、电导增量法、模糊逻辑、神经网络等智能处理方法以及不同控制策略的结合[1-4]。爬山法(即扰动观察法,P&O)是MPPT算法中较常用的方法之一,传统爬山法以光伏输出电压为扰动变量,通过闭环反馈稳定后的状态来判断扰动方向,跟踪速度慢。文献[5]最早提出基于直接占空比扰动的MPPT控制思想;文献[6-7]将这种控制思想应用于爬山法等MPPT控制算法上;文献[8-12]对这种控制思想进行了一些研究,但仍需进一步给出定量的分析。
本文通过光伏阵列建模和全桥变换器稳态建模,对直接占空比扰动控制模式进行了原理分析,建立了光伏功率、电压和占空比之间的定量函数关系,给出了直接占空比扰动控制的控制机理,并以此为依据,提出了一种新型变步长自适应爬山法控制策略,并采用PSIM仿真平台对基于直接占空比扰动自适应爬山法的光伏发电系统进行了仿真,仿真实验结果验证了占空比扰动自适应爬山法的有效性和优越性。
1 光伏MPPT控制的理论基础
光伏最大功率点跟踪无论是恒定电压法、扰动观察法、电导增量法(本质上与扰动观察法一致),还是模糊逻辑、神经网络等智能控制方法,最终都归结为对变换器占空比的控制。因此,建立光伏电池特性I-U、变换器结构参数、负载、光伏电池输出功率P、占空比D之间的定量函数关系成为各种控制策略的共同理论基础。
1.1 光伏电池和光伏阵列的物理数学模型
硅光伏电池的等效电路如图1所示[3-4]。
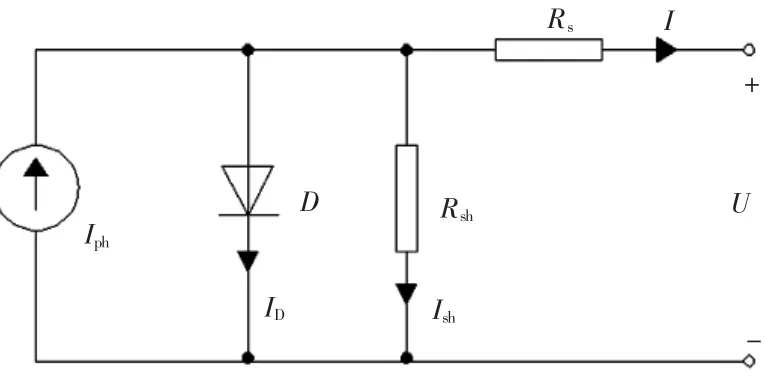
图1 硅系光伏电池单元的等效电路Fig.1Equivalent circuit of Si-type PV cell
图中,Iph为光生电流,Iph值正比于光伏电池的面积和入射光的辐照度,并且与环境温度有关;ID为暗电流,即当前环境温度下通过P-N结的总扩散电流,其方向与Iph相反;Rs为串联电阻;Rsh为旁路电阻,Ish为旁路电流。根据图1则各变量方程式为
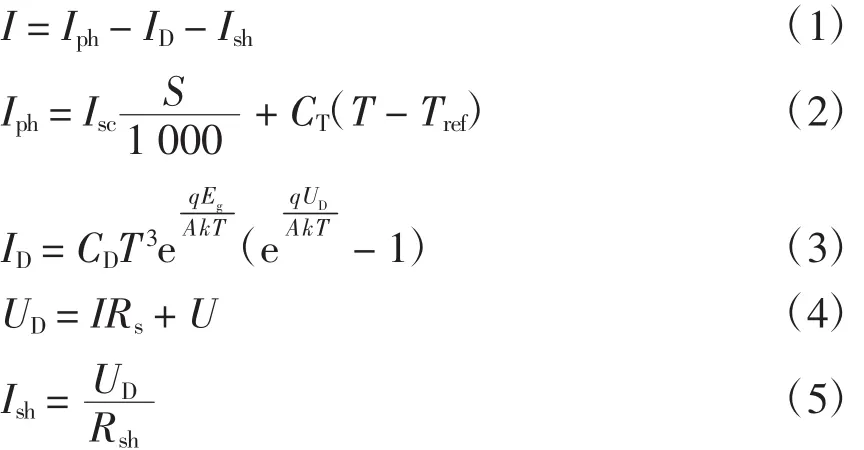
式中:I为光伏电池输出端电流;U为光伏电池输出端电压;Isc为短路电流;S为光照照度,W/m2;CT为温度补偿系数;T为绝对温度;Tref为参考温度,Tref=273 K;CD为温度系数;Eg为禁带宽度;UD为等效二极管端电压;q为电子电荷量,q=1.6×10-19C;k为玻耳兹曼常量(k=1.3 806 505(24)×10-23J/ K);A为P-N结的曲线常数。
设光伏阵列由NS个上述电池单元串联后再进行NP个支路并联构成,并进行理想化假设,则光伏阵列的输出满足的条件[1]为

其中,UA、IA、PA之间的函数关系[3-4,13]为
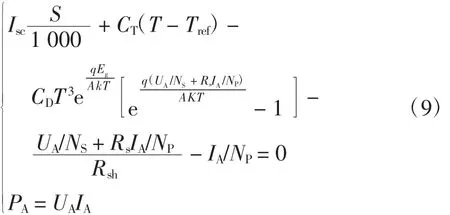
根据具体光伏电池型号、阵列串并联个数以及光照、温度环境参量,代入温度系数等其他参数,即可描述任何光伏方阵的IA-UA和PA-UA特性。
本文实际采用的SP190-72M型光伏电池方阵选取参数为S=1 000 W/m2,T=298 K,Isc=1.35 A,NS=960,NP=8,绘出光伏方阵的IA-UA和PA-UA曲线,如图2所示。
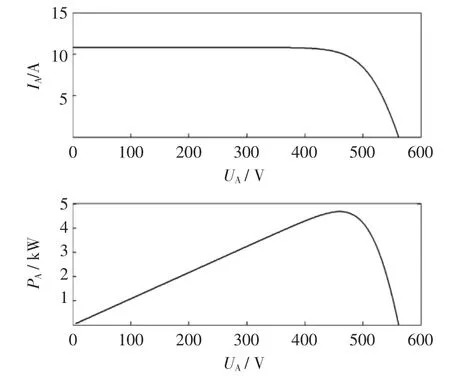
图2 IA-UA和PA-UA曲线Fig.2Curves of IA-UAand PA-UA
1.2 全桥变换器MPPT控制的的理论基础
本文选择全桥DC/DC变换器,光伏发电系统结构如图3所示。光伏阵列由SP190-72M型光伏组件(Pm1=190W,Uoc1=46.2V,Isc1=5.42A,Um1= 38.6 V,Im1=4.92 A)12串2并构成,标准条件下额定电压为460 V,额定电流为9.8 A,最大功率为4 500 W。
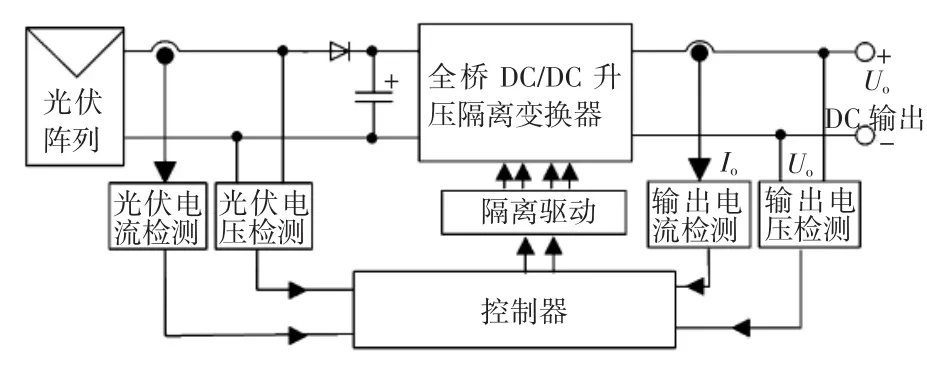
图3 光伏发电系统原理Fig.3Principle of PV power system
设全桥DC/DC变换器的变压器变比kn=n2/n1,变换器输出直流电压为Uo,负载为RL,效率为η。根据稳态功率平衡有

则

当占空比D变化时,光伏方阵的功率点曲线如图4所示。
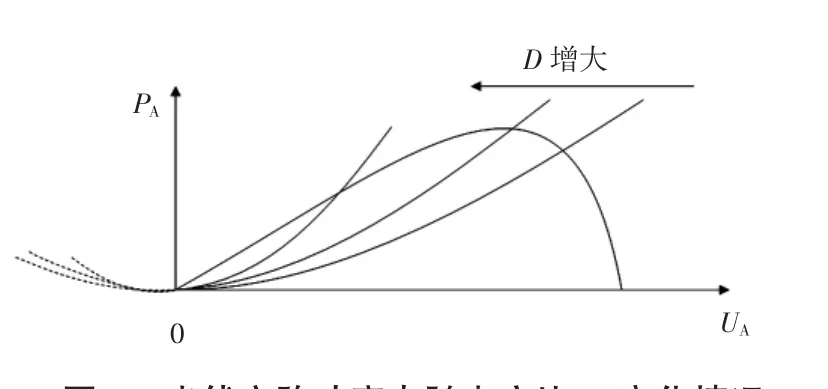
图4 光伏方阵功率点随占空比D变化情况Fig.4PV array power point with the duty ratio D changing
当光伏阵列PA-UA特性、DC/DC变换器的变压器变比k′、负载RL以及DC/DC变换器效率η确定后,且电路达到稳态时占空比D与光伏阵列输出功率PA即存在确定的函数关系。
1.3 光伏MPPT控制理论依据的仿真验证
建立光伏发电系统的PSIM仿真电路,见图3。通过参数扫描(0,0.05,0.10,0.15,…,1.00,共29个点)设定占空比D从0~1变化,并根据主电路变压器变比设定kn=110/72,负载RL=68 Ω;PSIM Solar Module(物理模型)主要参数设置为:NS=960,Isc0= 10.76 A。仿真运行后得到D、UA、PA的仿真数据。
将仿真中对应的D、UA及k、RL值代入式(12),取η=0.996,计算得到光伏电池的输出功率理论值Pt。用Matlab处理后得到PA-D、Pt-D曲线如图5所示,基于该曲线即可实现直接占空比扰动控制MPPT。
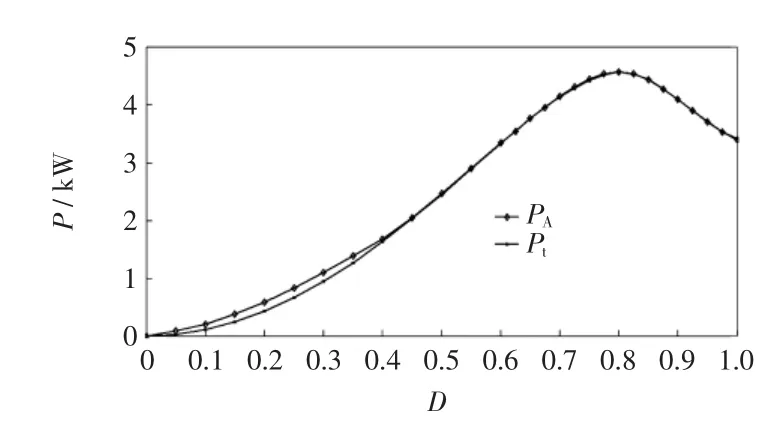
图5 PA-D、Pt-D曲线对比Fig.5Comparison of PA-D and Pt-D curves
由图5可见,光伏电池方阵仿真所得PA曲线与理论计算所得Pt曲线的相比,二者有良好的吻合度,但占空比较小时偏差较大,原因是此时功率输出小,DC/DC变换器电路本身损耗比重较大,效率较理论计算的取值小很多。
2 基于直接占空比扰动的新型变步长自适应爬山控制算法
2.1 基于直接占空比扰动的固定步长爬山法
上述分析为各种MPPT控制提供了理论基础,特别是可以为直接占空比扰动控制算法提供明确的控制流程。直接占空比扰动控制方法直接将占空比作为控制参数,依据DC/DC变换器的占空比与光伏电池输出功率之间的关系曲线,通过占空比某个方向的扰动,将当前功率与前一时刻功率相比较,决定下一时刻直流变换器占空比的增减。由光伏功率、电压、变换器占空比定量关系可导出直接占空比扰动固定步长爬山法的控制方法,如图6所示。该方法只需一个控制循环就可以提高系统响应速度,减小控制器设计的复杂度[7,12]。
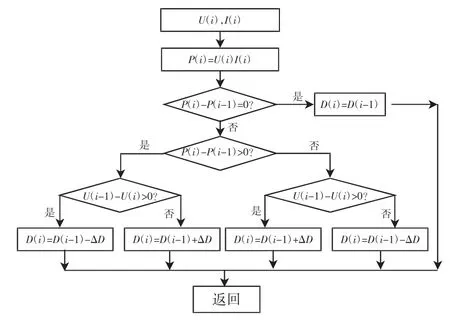
图6 直接占空比扰动固定步长爬山算法原理Fig.6Schematic of direct duty cycle perturbation hill climbing method with constant step
2.2 基于直接占空比扰动的新型变步长自适应爬山法
基于占空比扰动的固定步长爬山法仍然存在着扰动量调整步长大小选择的问题,即步长过小,跟踪时间较长,影响系统的动态响应特性;步长过大,输出功率波动加大,平均功率降低,甚至造成系统不稳定。为解决这一问题,本文提出一种新型基于P-D曲线逻辑判别和步长在线计算的变步长自适应爬山控制算法,控制策略如图7所示。
图中,ep、ed、D(0)分别为跟踪精度、扰动精度、初始占空比,取值根据实际控制要求与系统特性决定。
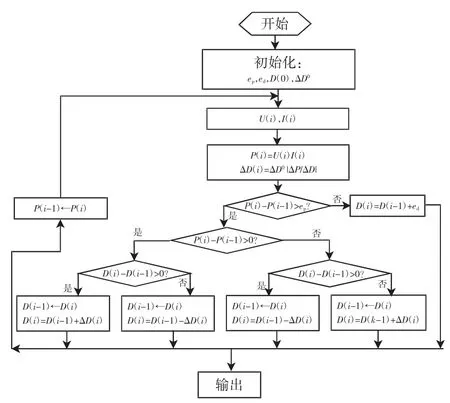
图7 自适应爬山算法流程Fig.7Flow chart of adaptive hill climbing method
该控制算法以P-D曲线为理论依据,以占空比为直接控制调节对象,在线进行占空比的调整方向判断和占空比步长大小的计算。在进行占空比调整方向判断时根据上一次功率增量和占空比增量的判断来确定本次占空比的调整方向,以确定的占空比增量来取代传统方法测量光伏电压的增量,排除了电压测量干扰带来的误判,提高了算法的可靠性。
占空比步长大小进行自动在线调整,实现控制步长自适应调节,其计算公式为

式中:ΔD(i)为占空比D的调整步长;ΔD0为占空比增量的基准值,即

3 直接占空比扰动的MPPT控制算法的PSIM仿真
本文采用PSIM Solar Module和C block等模块建立了光伏MPPT控制仿真系统,实现MPPT数字算法控制仿真。在相同条件下,分别采用传统电压闭环扰动爬山法、占空比扰动固定步长爬山法和本文自适应爬山法进行光伏发电MPPT仿真。设t=0.06 s时光照强度S由1 000 W/m2降为800 W/ m2;t=0.12 s时T从298 K(25℃)突变为323 K(50℃)。仿真波形如图8所示。图中Pmax为理想最大功率、Po为实际输出功率、Ua为图8(a)中光伏方阵输出电压扰动步长、Da为图8(b)、(c)中占空比调整步长。
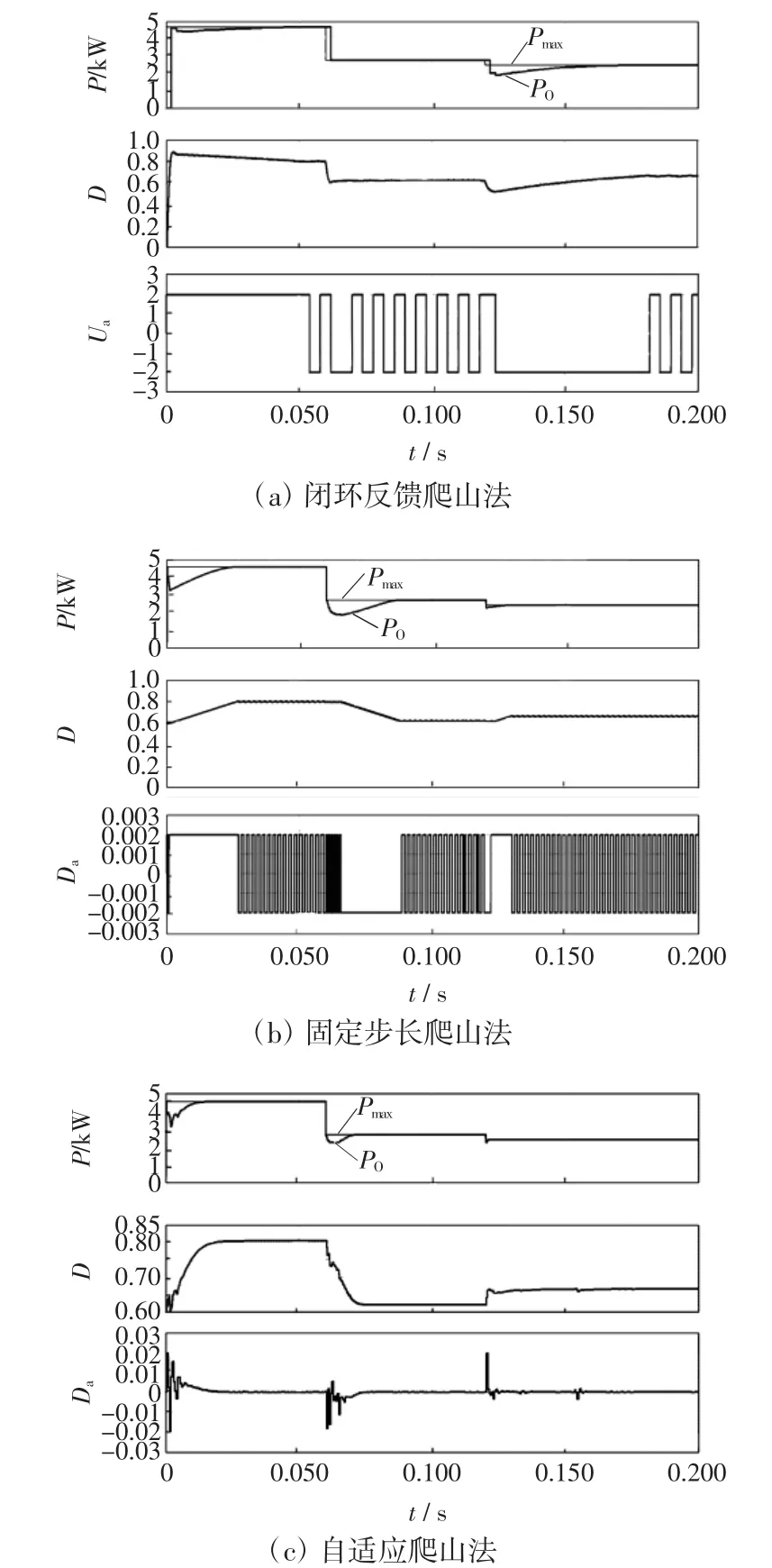
图83 种爬山法仿真波形Fig.8Simulative waveforms of three hill climbing methods
由图8可以看出,对于抗光照突变,图8(a)方法性能最好、速度最快,图8(c)方法稍逊,图8(b)方法最差;而对于抗温度突变,图8(c)方法跟踪速度最快,性能最优,图8(b)方法次之,图8(a)方法最差。而图8(a)、图8(b)中2种方法在最大功率点处都有振荡。综合比较,图8(c)所示的新型直接占空比扰动自适应爬山法的占空比调整步长ΔD(i)的大小和方向能够根据工作状态自适应地进行调整,在各种扰动情况下均有快速的跟踪速度,且消除了最大功率点处的振荡,跟踪精度高,具有明显的综合优势。
4 结论
本文以4.5 kW光伏并网发电系统为例,研究光伏系统中直接占空比扰动的自适应爬山控制方法,通过推导占空比与光伏系统其他变量之间的函数关系和PSIM仿真,得出了如下结论:
(1)占空比与光伏功率和光伏电压之间确定的函数关系是扰动观察法等各种MPPT控制策略的理论基础;
(2)基于这一理论基础提出的直接占空比扰动自适应爬山法与传统爬山法和固定步长爬山法相比,具有跟踪速度快、精度高且消除了最大功率点处振荡等优点。
[1]赵争鸣,刘建政,孙晓瑛,等.太阳能光伏发电及其应用[M].北京:科学出版社,2005.
[2]杨海柱,金新民(Yang Haizhu,Jin Xinmin).并网光伏系统最大功率点跟踪控制的一种改进措施及其仿真和实验研究(Research on improved measure of MPPT control and its experiment in a grid-connected photovoltaic system)[J].电工电能新技术(Advanced Technology of Electrical Engineering and Energy),2006,25(1):63-67.
[3]黄舒予,牟龙华,石林(Huang Shuyu,Mou Longhua,Shi Lin).自适应变步长MPPT算法(Adaptive variable step size MPPT algorithm)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2011,23(5):26-30.
[4]周文源,袁越,傅质馨,等(Zhou Wenyuan,Yuan Yue,Fu Zhixin,et al).恒电压结合牛顿法的光伏系统MPPT控制(Constant voltage tracking combined with Newton method MPPT control for photovoltaic system)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2012,24(6):6-13.
[5]Eftichios K,Kostas K,Nicholas C V.Development of a microcontroller-based photovoltaic maximum power point tracking control system[J].IEEE Trans on Power Electronics,2001,16(1):46-54.
[6]Xiao Weidong,Dunford W G.A modified adaptive hill climbing MPPT method for photovoltaic power systems[C] //IEEE 35th Annual Power Electronics Specialist Conference.Aachen,Germany:2004.
[7]李鹰,康龙云,朱洪波,等(Li Ying,Kang Longyun,Zhu Hongbo,et al).一种新型光伏发电系统最大功率跟踪算法(Improved maximum power point tracking algorithm for stand-alone photovoltaic system)[J].电气传动(Electric Drive),2010,40(12):35-39.
[8]雷元超,陈春根,沈骏,等(Lei Yuanchao,Chen Chungen,Shen Jun,et al).光伏电源最大功率点跟踪控制方法研究(Research on control method of maximum power point tracking for photovoltaic power system)[J].电工电能新技术(Advanced Technology of Electrical Engineering and Energy),2004,23(3):76-80.
[9]温嘉斌,刘密富(Wen Jiabin,Liu Mifu).光伏系统最大功率点追踪方法的改进(Improvement of maximum power point tracking for photovoltaic system)[J].电力自动化设备(Electric Power Automation Equipment),2009,29(6):81-84.
[10]焦阳,宋强,刘文华(Jiao Yang,Song Qiang,Liu Wenhua).基于改进MPPT算法的光伏并网系统控制策略(Control strategy of grid-connected photovoltaic generation system based on modified MPPT method)[J].电力自动化设备(ElectricPowerAutomationEquipment),2010,30(12):92-96.
[11]张淼,吴捷,侯聪玲,等(Zhang Miao,Wu Jie,Hou Congling,et al).自适应算法在光伏发电系统最大功率追踪中的应用(Application of adaptive algorithm in maximum power point tracking of photovoltaic)[J].电力电子技术(Power Electronics),2005,39(2):50-52.
[12]潘雷雷,李国丽,胡存刚(Pan Leilei,Li Guoli,Hu Cungang).新型占空比直接控制的光伏MPPT研究(Research on a photovoltaic MPPT method based on novel duty ratio direct control)[J].电气传动(Electric Drive),2011,41(7):25-29.
[13]白政民,方波,张元敏,等(Bai Zhengmin,Fang Bo,Zhang Yuanmin,et al).基于orCAD/PSpice ABM仿真的光伏新型改进CVT控制研究(Research on new type improved photovoltaic(PV)constant voltage tracking(CVT)control based on orCAD/PSpice analogy behavioral model simulation)[J].电力系统保护与控制(Power System Protection and Control),2011,39(21):126-131.
Novel Adaptive Hill Climbing Algorithm for PV Power System with Direct Duty Cycle Perturbation
FANG Bo1,2,ZHANG Yuan-min1,KANG Long-yun2,3
(1.School of Electrical and Information Engineering,Xuchang University,Xuchang 461000,China;2.School of Electric Power,South China University of Technology,Guangzhou 510640,China;3.Guangdong Key Laboratory of Clean Energy Technology,Guangzhou 510640,China)
In order to improve the control performance of maximum power point tracking(MPPT)in photovoltaic(PV)power system,the principle of direct duty cycle perturbation control mode is analyzed,and the quantitative functional relationships with PV power,voltage and duty cycle are established by means of modeling the steady-state PV array and the full-bridge converter,then the control principle of direct duty cycle perturbation is given.Based on this one,a novel control algorithm named adaptive variable step hill climbing algorithm is proposed.The theoretical analysis is verified by PSIM simulation and the PV power system based on the new method proposed above is simulated.The simulation contrast results show that the new adaptive hill climbing method is practicable and superior.
photovoltaic(PV);direct duty cycle perturbation;adaptive hill climbing algorithm;maximum power point tracking(MPPT);simulation
TM615
A
1003-8930(2014)09-0030-05
方波(1973—),男,硕士,副教授,研究方向为电力电子与新能源发电技术。Email:fangboxc@126.com
2013-08-09;
2014-01-10
河南省科技攻关项目(112102310536);许昌市科技攻关项目(140203027);河南省高校科技创新团队项目(14IRTSPHN022)
李明(1982—),男,博士,讲师,研究方向为微电子技术与应用。Email:mingli245@yahoo.com.cn
康龙云(1961—),男,博士,教授,博士生导师,研究方向为电力电子技术在可再生能源、电动汽车中的应用。Email:lykang@scut.edu.cn
猜你喜欢
数学物理学报(2022年4期)2022-08-22
成都信息工程大学学报(2021年5期)2021-12-30
北京航空航天大学学报(2021年7期)2021-08-13
作文成功之路·小学版(2019年12期)2020-01-19
数学物理学报(2019年4期)2019-10-10
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(2018年31期)2018-12-06
贵州师范学院学报(2016年3期)2016-12-01
小主人报(2016年3期)2016-02-28
北京航空航天大学学报(2016年12期)2016-02-27