三节臂挖掘装置的优化设计*
2014-07-31 20:41王克逸凌江波
机械研究与应用 2014年2期
李 威,王克逸,韩 军,凌江波,高 晏
(1.中国科学技术大学 精密机械与精密仪器系,安徽 合肥 230027; 2.总装工程兵科研一所, 江苏 无锡 214035)
三节臂挖掘装置的优化设计*
李 威1,2,王克逸1,韩 军2,凌江波2,高 晏2
(1.中国科学技术大学 精密机械与精密仪器系,安徽 合肥 230027; 2.总装工程兵科研一所, 江苏 无锡 214035)
为了对三节臂挖掘装置进行优化设计,采用Denavit-Hatenberg齐次变换矩阵建立了整个挖掘装置的运动学模型,确定了各个关节相对于基础坐标系的函数关系式。根据三节臂挖掘装置的特点,建立了以挖斗挖掘时主挖掘区内挖斗油缸主动作用力充分发挥的比例为目标函数的优化设计计算模型,得到了挖掘装置在挖掘范围内的挖掘力的分布特性,为三节臂挖掘装置的设计提供了理论依据。
三节臂;挖掘装置;挖掘图谱;优化
0 前 言
三节臂挖掘装置由上动臂、下动臂、斗杆和挖斗及其驱动油缸组成[1],该挖掘装置具有4个自由度。相对于传统折弯式挖掘装置,三节臂挖掘装置上、下动臂间夹角可通过驱动油缸调节,从而增大了挖掘范围,降低了布置的重心,提高了机械的工作性能。挖掘装置在作业空间里的力学特性及挖掘图谱,决定了挖掘装置在复杂环境下的作业性能,对三节臂挖掘装置的设计具有重要意义。
笔者利用空间机构学中的Denavit-Hartenberg法[2],形成挖掘装置的齐次变换矩阵,描述挖掘装置的上动臂、下动臂、斗杆和挖斗相对于基坐标系中的空间几何关系;利用其几何关系,建立三节臂挖掘装置在各驱动油缸作用下挖掘装置的优化分析模型,并得到优化前后挖掘力分布特性的对比,对实例进行分析。
1 挖掘装置的运动学模型
图1是三节臂挖掘装置的运动学模型,主要由上动臂、下动臂、斗杆、挖斗及其驱动油缸组成。以底盘的回转中心点O为坐标原点,建立挖掘装置的基坐标系{0}-xOy;以上动臂回转点C为坐标原点,建立坐标系{1}-x1Cy1;以下动臂回转点B为坐标原点,建立坐标系{2}-x2By2;以斗杆回转点F为坐标原点,建立坐标系{3}-x3Fy3;以挖斗回转点Q为坐标原点,建立坐标系{4}-x4Qy4;θ1、θ2、θ3、θ4分别为坐标系{1}、{2}、{3}、{4}相对于坐标系{0}、{1}、{2}、{3}的旋转角度。
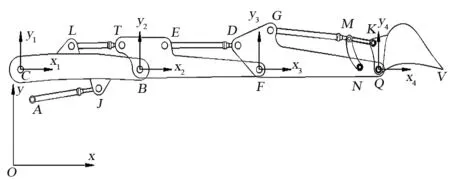
图1 三节臂挖掘装置的运动学模型

(4)

(5)
式中:1P、2P、3P、4P分别为P点在{1}、{2}、{3}、{4}坐标系内的表达式。
图1中,B1x=lCB,B1y=0;F2x=lBF,F2y=0;Q3x=lFQ,Q3y=0;(符号lCB表示C点到B点间的长度,以此类推。)
根据式(1)~式(5),可以得到斗齿间V点在{0}坐标系中的表达式为:
(6)
图2为斗杆与挖斗连接的局部结构,机构NMKQ属于双摇杆机构,可以得到:

lNQ-lKQcosβ=0
(7)
∠β从初始位置到运动位置的变化量即为θ4的值。
在上式中,β关于α是一个非线性关系,可采用函数逼近优化方法[3]对其求解。
同理,利用上述的变换关系,亦可容易求得挖掘装置各部件的质心在基坐标系{0}下的坐标。
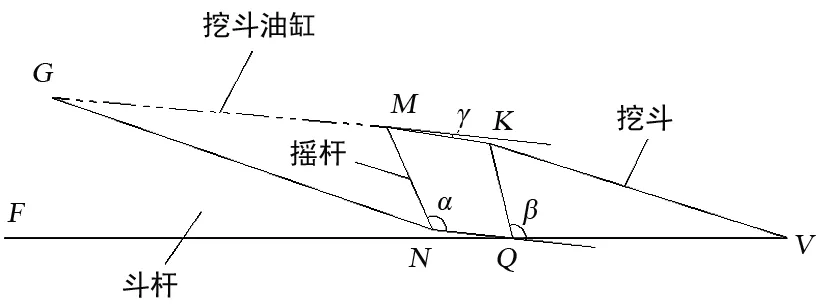
图2 摇杆机构简图
2 优化设计模型
根据三节臂挖掘装置的结构特点,设计变量选为:上动臂油缸上铰点A(ax,ay)、行程S1,下动臂油缸上铰点L(lx,ly),斗杆油缸上铰点E(ex,ey),上、下动臂长度比C。
在挖掘装置挖掘区内任一个坐标点上,驱动挖斗油缸,并保持其它油缸闭锁,此时,若驱动挖斗油缸使斗齿产生最大切削力为最大挖掘力,方向为沿斗齿的切线方向,就表明在该位置挖斗油缸主动作用力充分发挥得到了充分的发挥。在三节臂挖掘装置中,希望挖斗油缸主动作用力尽可能得到充分大的发挥,故选取主挖掘区内挖斗油缸主动作用力充分发挥的比例[4]为目标函数。目标函数的求解,首先要通过给定的优化设计变量获得挖掘装置的挖掘范围,然后计算主挖掘区内各位置的挖掘力和限制因素,最后通过判断挖掘力的限制因素即可求得主挖掘区内挖斗油缸主动作用力充分发挥的比例。
如此即可得到以挖斗油缸主动作用力充分发挥比例为目标函数的优化数学模型,如下式:
MaxF(X)
s.t.lCBsinθ1min+lBF+lFQ+lQV-C0y≥6 000
(lCB+lBF+lFQ)sinθ1max+lQVsinθ4max+
C0y≥8 000
(8)
式(8)中F(X)代表目标函数,以挖掘装置的挖掘性能参数(最大挖深、最大挖高)为约束条件。利用该优化模型,采用遗传算法对该优化模型求解[5],即可得到最优的一组优化设计变量。
3 实例计算与分析
3.1 三节臂挖掘装置挖掘包络图
已知挖掘装置的结构参数,依次变换上动臂、下动臂、斗杆和挖斗油缸参数,根据斗齿尖的轨迹,利用MATLAB可以得到挖掘装置的包络图[6]。如图3所示。

图3 三节臂挖掘装置挖掘包络图
在包络图中,可以得到挖掘装置的挖掘范围,其最大挖掘半径、最大挖掘深度、最大挖掘高度。可以看出4自由度挖掘装置比3自由度挖掘装置的包络图要复杂很多。
3.2 三节臂挖掘装置优化设计
已知三节臂挖掘装置的机构参数:lCL=1 300 mm,lCB=2 845 mm,lCA=666 mm,lBF=2 845 mm,lBT=650 mm,lFD=700 mm,lFQ=2 848 mm,lDG=833 mm,lNQ=450 mm,lMN=630 mm,lMK=580 mm,lQV=1 544 mm,lKV=1 755 mm;油缸参数如表1所示。

表1 三节臂挖掘装置的油缸参数 /mm
由式(8)的优化设计数学模型,对三节臂挖掘装置的进行了3次优化,可以得到优化后的设计变量见表2。从表2中可以看出,优化前后主挖区挖斗油缸主动作用力充分发挥比例分别为43.56%、53.95%,优化后提高了10.39%。
将作业装置上动臂油缸行程(L1)、下动臂油缸行程(L2)、斗杆油缸行程(L3)、挖斗油缸行程(L4)在其变化范围内分别划分成6份、6份、6份、11份,排列组合可以得到2 376个几何计算位置。分别计算出挖掘过程中斗齿尖V的坐标值随L1、L2、L3、L4的变化情况,计算后得到2 376个结果。为便于分析,给每组结果编上位置序号。其顺序为L4=L4min时取第1大组,这时L1、L2、L3变化组合得到216个位置,以此类推,可以得到11个大组即11副挖掘图谱[7-8]。

表2 优化设计结果
最大挖掘力大致出现在θ4=25°~35°处,L4=2 200 mm时,θ4=34°。选取该挖掘工况,并对该工况下优化前后的挖掘图谱进行观察分析(图4为优化前的挖掘图谱,图5为优化后的挖掘图谱)。
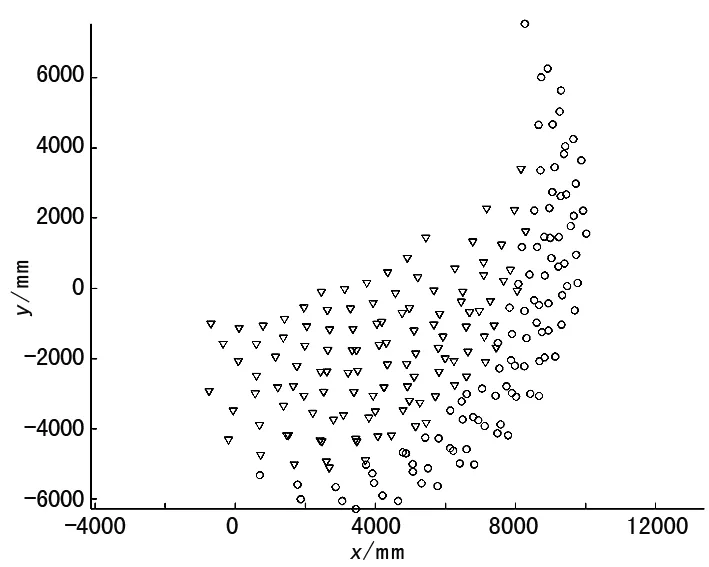
图4 优化前的挖掘图谱
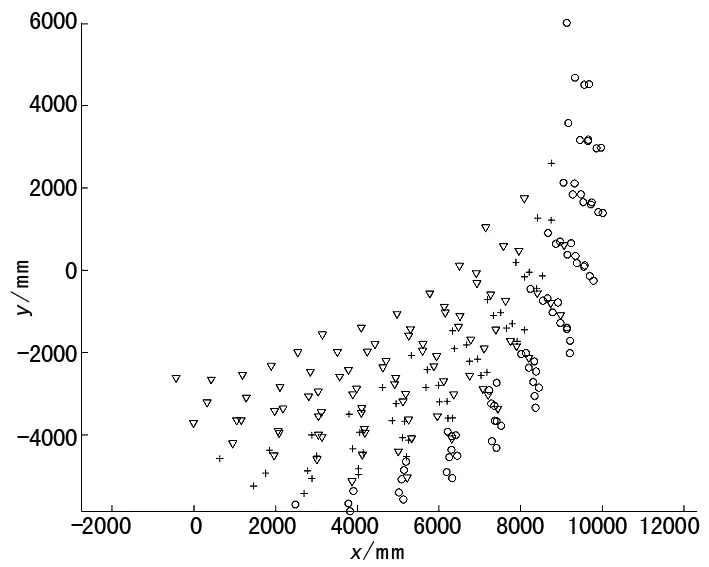
图5 优化后的挖掘图谱
图中加号表示挖斗油缸主动作用力可以充分发挥,圆圈表示上动臂油缸闭锁条件限制,倒三角表示斗杆油缸闭锁条件限制。由优化前后的挖掘图谱对比可见,经过优化后,主动挖掘力充分发挥比例明显提高(加号),实现了预期的优化效果。
4 结 语
针对三节臂挖掘装置机构的设计,提出了一种提高主挖掘区内挖斗油缸主动作用力充分发挥比例的优化设计方法。
利用此优化方法,简单、可靠,求解效率较高,具有较高的工程应用价值。
[1] 许 斌. 三节臂液压轮式挖掘机[J]. 交通世界,2010(15):44-47.
[2] 韩 军,陈高杰,王红坚. 四自由度挖掘装置的力学特性分析[J]. 解放军理工大学学报,2010,11(3):190-195.
[3] 袁亚湘,孙文瑜. 最优化理论与方法[M].北京:科学出版社, 2001.
[4] 李国芳,吴耀强,兰士新,等. 伸缩臂挖掘机挖掘力图谱分析[J]. 工兵装备研究, 2012, 31(1):8-11.
[5] 姜饶保,黄 斌,何清华,等. 液压挖掘机工作装置综合优化研究[J]. 机械传动, 2009,33(4):1-4.
[6] 同济大学. 单斗液压挖掘机[M]. 北京:中国建筑工业出版社,1986.
[7] 黄 斌,何清华,贺继林,等. 反铲液压挖掘机挖掘图谱程序化绘制与实验[J]. 农业机械学报, 2009,40(9):26-31.
[8] 杨 帆,吴小平.液压挖掘机工作装置有限元静强度分析[J].机械,2010(6):56-58.
Optimization Design for Three-arms Excavating Device
LI Wei1,2,WANG Ke-yi1,HAN Jun2,LING Jiang-bo2,GAO Yan2
(1.DepartmentofPrecisionMachineryandPrecisionInstrument,UniversityofScienceandTechnologyofChina,HefeiAnhui230027,China; 2.TheFirstEngineersScientificResearchInstituteoftheGeneralArmamentsDepartment,WuxiJiangsu214035,China)
With Denavit-Hatenberg homogeneous transform matrix,the kinematics model of a three-arms excavating device is constructed and the functions of all revolving joints based on the basic reference frame are established to optimize the design of three-arms excavating device. According to the characteristics of the three-arms excavating device, the optimization model of the proportion is established when the bucket arm active force is made full use in the main excavating area. Furthermore, the distribution of the excavating force in the excavating area is obtained. Thus the foundations of the design are provided.
three-arms; excavating device; excavating map; optimization
2014-01-02
李 威(1988-),男,安徽亳州人,工程师,主要从事工程机械设计方面的研究工作。
TH2
A
1007-4414(2014)02-0030-03
猜你喜欢
机械设计与制造(2022年7期)2022-07-27
中国石化(2022年5期)2022-06-10
公民与法治(2020年13期)2020-07-27
机械工程师(2020年5期)2020-06-19
成组技术与生产现代化(2019年3期)2020-01-14
建筑机械化(2018年6期)2018-06-29
中学生数理化·高三版(2016年2期)2016-09-10
中学生数理化·高二版(2016年6期)2016-05-14
中国老区建设(2016年5期)2016-02-28
科学中国人(2016年35期)2016-01-28