
基于PIC单片机的直流无刷电机驱动控制器
2014-07-24 19:00吕仲军刘泽潮
石家庄铁道大学学报(自然科学版) 2014年3期
吕仲军, 刘泽潮
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
基于PIC单片机的直流无刷电机驱动控制器
吕仲军, 刘泽潮
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
介绍了一种基于PIC18Fxx单片机的直流无刷电机的控制器;实现了电机的过流保护、欠压保护、PWM调速和速度闭环控制;设计了主要的硬件电路;并给出了部分软件流程图。通过实验与仿真验证了系统的可靠性与稳定性。
直流无刷电机;PWM;闭环控制;单片机
0 引言
通常意义上将反电势为梯形波的永磁同步电机称为直流无刷电机。直流无刷电机是一种结合了直流电机和交流电机优点的改进型电机,直流无刷电机用电子换相器取代了机械换向器与电刷,运行可靠,维护简便。PIC18Fxx系列单片机是由Microchip公司推出的8位处理芯片,最高主频达到64 Mhz可以用作电机驱动控制芯片。IR2130是IR公司推出的MOSFET驱动芯片,内部具有欠压锁定电流、过流检测电路和电流放大电路。PID控制可以实现电机的速度闭环控制,使电机转速稳定在一个固定值。
1 直流无刷电机结构与原理
1.1 电机结构
直流无刷电机由电机本体、转子位置传感器和电子换相电路三部分组成。
电机本体主要包括定子和转子两部分[1]。定子是指电机本体的静止部分,由导磁的定子铁心、导电的电枢绕组及机壳、绝缘片、引出线、环氧树脂等组成。转子是电机的转动部分,由永磁体、导磁体和支撑部件组成。
转子位置传感器主要有三类[1]:①电磁式位置传感器;②光电式位置传感器;③磁敏式位置传感器。霍尔传感器由于结构简单,性能可靠,成本低,正成为直流无刷电机最主要的位置传感器。
电子换相由信号调理电路、换相逻辑处理电路、功率器件等组成。由于位置传感器输出的信号强度弱,所以必须经过信号调理电路对信号进行放大。换相逻辑处理电路可以由专用的直流无刷电机控制芯片或者单片机、数字信号处理器等构成。功率器件为定子绕组提供电流。
1.2 电机原理
直流无刷电机定子为绕组,转子为永磁体。理论上来说定子磁场超前转子磁场90°所产生的电磁转矩最大。随着转子位置的改变,位置传感器输出对应的转子位置信号,换相逻辑处理电路通过对位置信号进行处理确定应当导通的绕组。功率驱动电路来导通定子绕组,产生定子磁场。定子磁场与转子磁场相互作用产生电磁转矩,电机运转[2]。
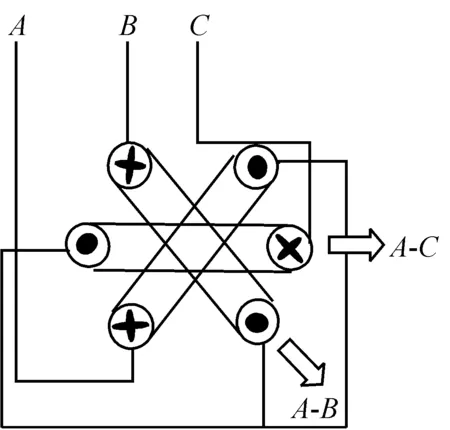
图1 三相直流无刷电机原理图
直流无刷电机的原理图如图1所示,当电流从A相流入绕组从B相流出时,根据法拉第电磁感应定律所产生的电磁作用力为A-B方向,转子转动,位置传感器输出信号改变,改变导通绕组,电流由A相流入从C相流出,所产生的电磁作用力为A-C所示方向。随着导通绕组的不断改变,所产生的电磁作用力的方向不断改变,在电磁作用力的作用下转子不断旋转实现电机的运转。
2 硬件设计
2.1 单片机控制电路
采用Microchip公司的PIC18Fxx系列单片机,该单片机具有最高64 MHz的CPU频率,可以实现霍尔信号的采集与电机的驱动控制[3]。单片机控制电路图如图2所示,OSC1与OSC2为单片机的外部晶振接口,外接24 MHz晶振的两端。RC2、RC6、RC7为PWM输出端,为上桥臂的三个功率管提供PWM信号。RD0、RD1、RD2为下桥臂三个功率管的开关提供信号。RB4为模拟输入通道,用来进行相电流的采样。RC5为普通IO口,接收来自IR2130的错误报警信号。RB0、RB1、RB2为霍尔信号输入端,接收经过处理的霍尔信号。
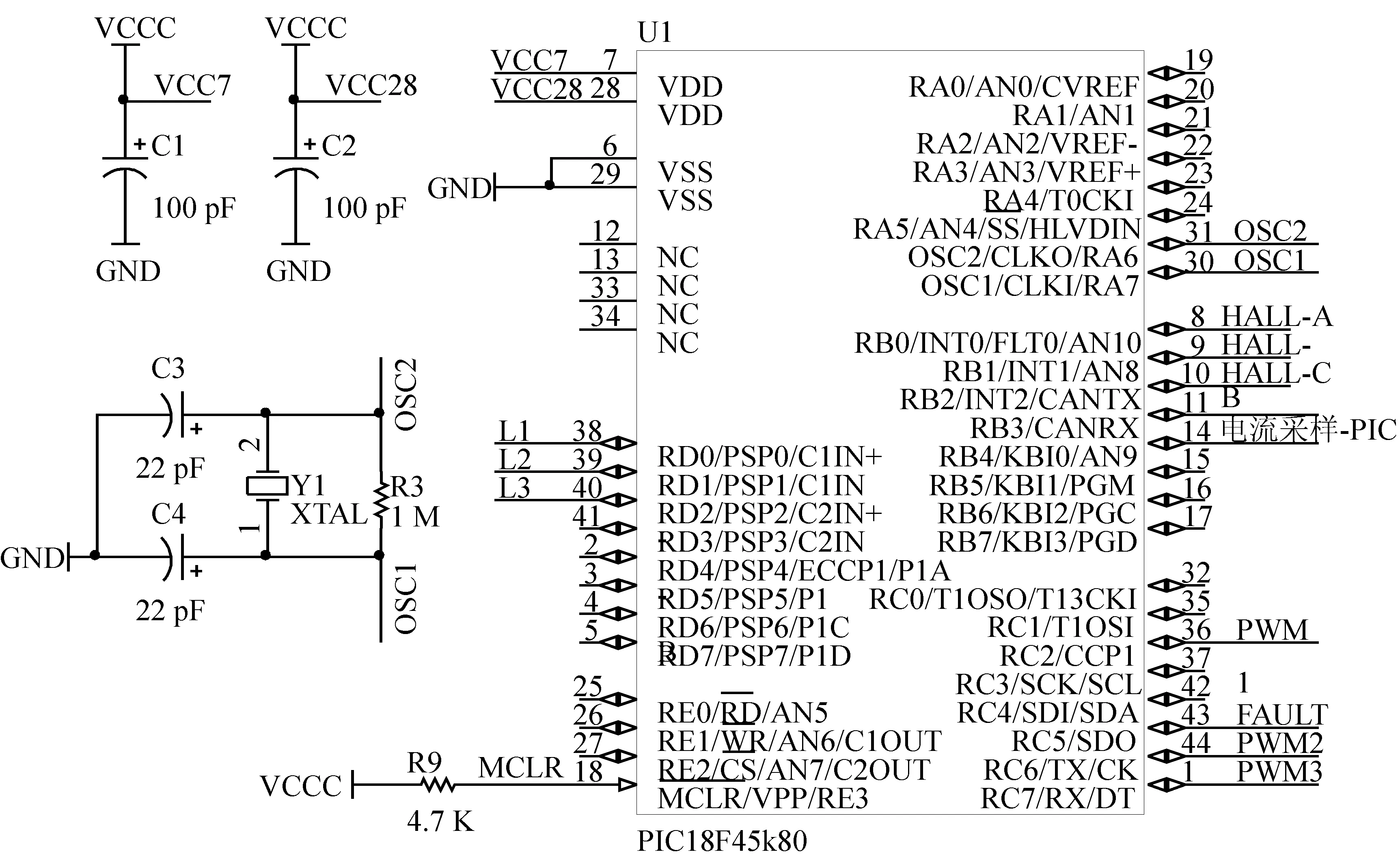
图2 单片机控制电路图
2.2 驱动电路
功率器件的驱动电路由IR2130的MOSFET驱动电路和MOSFET的桥式驱动电路两部分组成。
单片机引脚的输出能力有限无法直接驱动MOSFET,所以在单片机与电机驱动电路之间加上一个MOSFET驱动芯片IR2130[4]。IR2130是IR公司生产的MOSFET、IGBT功率器件专用栅极驱动芯片,通过自举电路使其既能驱动桥式电路中低压侧的功率器件,又能驱动高压侧的功率器件。同时其具有电流放大及过电流保护功能、欠压锁定功能、自动死区时间等功能。
三相星形联结全桥式驱动电路图[5]如图3所示,全桥式驱动电路由6个MOSFET构成,每次导通两个MOSFET[6]。以Q1为例,从IR2130引脚出来的驱动信号经过栅极驱动电阻R1送给Q1的栅极。D1为快速恢复二极管,可以加快Q1的关断速度。在Q1的栅极与源极间并联了一个电阻R2和一个二极管D2,电阻R2可以减小栅极与源极间的阻抗,而二极管D2可以防止Q1被尖峰电压击穿。为了防止在开关瞬间漏极的尖峰电压,所以在源极和漏极间加入C1、R3缓冲电路与保护二极管D3。R19为电流采样电阻,通过对R19的端电压进行测量来实现相电流采样。
3 软件设计
3.1 霍尔信号采集子程序
霍尔信号的采集通过单片机的外部中断端口来实现。PIC单片机的中断优先级分为高优先级中断和低优先级中断[6]。PIC18Fxx单片机有两个中断入口地址,产生高优先级中断时指针自动跳转到08H;产生低优先级中断时指针自动跳转到18H。为了保证电机的正常换相,所有霍尔信号采集端口均配置为高优先级中断。在初始化时,根据当前的霍尔信号的状态配置外部中断触发方式。霍尔信号为低电平时配置为上升沿触发;霍尔信号为高电平时配置为下降沿触发[7]。换相子程序流程图如图4所示。
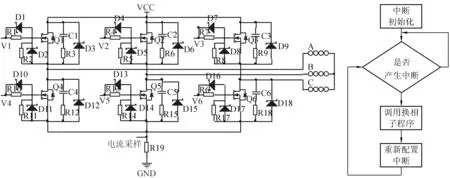
图3 三相星形联结桥式驱动电路 图4 换相子程序流程图
中断响应后指针跳转到高优先级中断入口地址。进入中断后首先读取当前霍尔信号值,调用换相控制子程序。然后判断触发中断源,重新配置中断触发方式,为下次中断做准备。清中断标志位,等待下次中断响应。
3.2 换相逻辑控制
常用的三相直流无刷电机为三相六状态。霍尔信号的输出波形与传感器的安装方式和转子的极对数有关。当极对数为1时,霍尔信号的相位角为180°。随着极对数的改变,霍尔信号的相位角也在发生改变[5]。
直流无刷电机通过改变定子绕组的导通顺序来实现电机的运转。定子绕组采用“二二”导通方式,即在每个导通时间内有两个功率器件导通。PWM控制方式采用H_PWM-L_ON调制方式。上桥臂功率管进行PWM控制,下桥臂开关管保持常开。三相六步控制真值表[2]如表1所示。
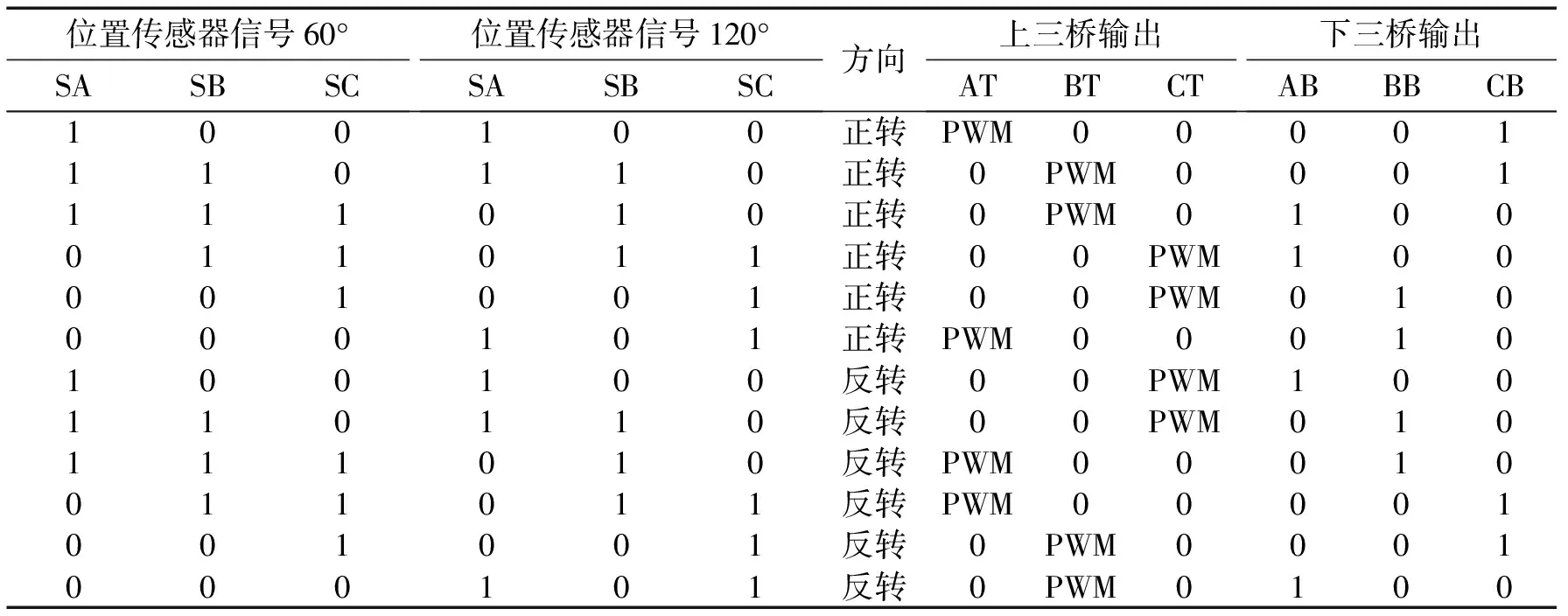
表1 三相六步控制真值表
3.3 速度闭环控制
在电机的伺服控制系统中要求电机的输出转速恒定在一个固定数值。如果采用开环控制系统当外界的负载发生变化时电机的转速会发生波动,闭环控制系统可以使电机快速恢复到设定转速。PID控制即比例积分微分控制,作为一种经典的控制理论具有较好的鲁棒性。P控制为比例控制,可以对误差进行放大。I控制为积分控制,可以对误差进行累计,消除稳态误差。D控制为微分控制,可以对误差进行预判,对系统进行超前校正。在无法准确的建立电机模型的前提下通过调节合适的比例、积分、微分系数,可以使电机拥有较好的瞬态响应特性与稳态误差。由于现在的电机控制系统大部分采用的是数字控制系统,所以PID控制也相应的发展为数字PID控制。典型的数字式PID控制系统有增量式PID和位置式PID[7]。增量式PID的运算结果只与当前状态和前两拍状态有关,所以消除了位置式PID存在的积分饱和现象。
位置式PID公式如下
(1)
增量式PID公式如下
(2)
4 实验与仿真
速度PID仿真图如图5所示,可以看出系统在较短的时间内达到了稳态,无超调与稳态误差。当t=140 s时,加入外界扰动,在很短时间内系统重新达到稳态。
转子位置信号如图6所示,通道1、2、3分别为三个霍尔传感器输出的位置信号。直流无刷电机的极对数为2,霍尔传感器采用间隔120°方式安装,转子位置信号相角为30°。
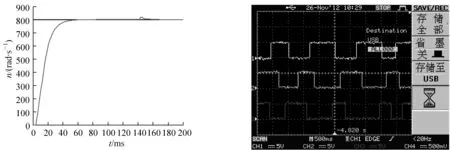
图5 速度PID仿真图 图6 转子位置信号
5 总结
介绍了以PIC18Fxx为核心的直流无刷电机控制系统,实现了霍尔信号采集、电机过流保护、PID闭环控制。经过调理的霍尔信号稳定,过流保护电路实现了电机的过流保护,PID速度闭环控制有效的抑制了电机的转速波动。通过实验表明该系统性能可靠、抗干扰性强,可以实现电机的平稳运行。
[1]刘刚,王志强,房建成.永磁直流无刷电机控制技术与应用[M].北京:机械工业出版社,2010.
[2]吴俊卿,张浩然,范宇龙.基于PIC16F877的电动自行车控制器的设计电子器件[J].电子器件,2010,33:642-645.
[3]刘和平,刘林. PIC18Fxxx单片机原理及接口程序设计[M].北京:北京航空航天大学出版社,2004.
[4]曹仁贤,茆美琴,许沐华.六输出高压驱动器IR2130的应用[J].国外电子元器件,1996(9):30-32.
[5] 王海欣,黄海宏.基于DSP的三相直流无刷电机调速系统的设计[J].电源技术应用,2007,10(9):21-24
[6] 钟晓伟,宋蛰存,许刚. 电动自行车用无刷直流电机控制系统设计[J].电机与控制应用,2011,38(1):20-24.
[7] 刘佳峰,谢杨华. 直流无刷电机换相时机的调整[J].电机技术,2006(3):27-30.
(责任编辑 车轩玉)
Brushless DC Motor Controller Based on PIC MCU
Lv Zhongjun, Liu Zechao
(School of Mechanical Engineering, Shijiazhuang Tiedao University, Shijiazhuang 050043, China)
This paper introduces a brushless DC motor controller based on the PIC18Fxx MCU. The Motor Hall signal acquisition, overcurrent protection, undervoltage protection, PWM speed control and speed closed-loop control are realized. The main hardware circuit and the flowchart of software are designed. The reliability and stability of the system is verified by experiment and simulation.
BLDC;PWM;closed-loop control;MCU
10.13319/j.cnki.sjztddxxbzrb.2014.03.16
2013-05-20
吕仲军 男 1963年出生 副教授
TM33,U464.9
A
2095-0373(2014)03-0075-05
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
大电机技术(2021年6期)2021-12-06
电子制作(2019年10期)2019-06-17
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
童话王国·文学大师班(2017年6期)2017-07-10
微特电机(2017年10期)2017-05-15
太空探索(2015年6期)2015-07-12
电机与控制应用(2015年7期)2015-03-01
赤峰学院学报·自然科学版(2012年19期)2012-10-14
