
基于Agent的UAV智能导航技术研究
2014-07-23 03:17刘亚军郭凤娟
现代导航 2014年2期
刘亚军,郭凤娟
(1 解放军驻西安地区军代室,西安 710068; 2 中国电子科技集团公司第二十研究所,西安 710068)
0 引言
智能导航是民航航路安全、协同作战、火力交战、空中加油、车载导航、机器人导航、自动着陆等领域中的一个关键问题。国内外学者在导航系统体系架构、导航算法、导航决策等方面做了大量论证工作[1-4]。目前,我国机载导航设备的信息缺乏综合应用,导航传感器缺乏智能管理控制,并且载机导航与任务导航无法统一飞行管理。为了满足未来动态战场环境对导航系统的需求,将人工智能Agent技术与综合导航技术相结合,实现导航系统的智能化和导航设备的自动化管理,确保UAV能够具有实时可靠的位置、速度、姿态等导航信息以及安全的飞行路径。本文提出了一种基于人工势场的航迹规划方法,并仿真验证了其有效性。
1 基于Agent的智能导航决策方法
UAV智能导航技术是指UAV通过自身定位以及对周围环境的感知,自主进行内部参数的调整,以进行智能环境建模、航迹规划、导航决策、智能管理等,引导UAV在准确的时间安全到达目标点。智能导航体现了UAV的自主性、智能性以及感知环境的能力。Agent技术源于分布式人工智能(Distributed Artificial Intelligent, DAI)领域,Agent是指在一个协作式系统中能持续运行,包括信念、义务、意图等精神状态的实体,可以通过传感器感知环境,通过效应器作用于环境。它具有自主性、主动性、反应性、推理性和交互性的特点,还具有知识、信念、意图、承诺等人性化的特征。为此,将智能Agent技术引入到导航系统中,建立了基于Agent的智能导航决策方法,如图 1所示。Agent技术可以在导航方式选择、异常检测、环境建模、智能管理等方面发挥巨大的作用,可以针对某些行为实现一定的适应性和学习能力。

图1 智能导航系统

图2 环境感知信息
智能导航的目的是如何利用传感器获得的外界环境信息和UAV自身状态信息,进行自身定位和自主规划行进路线,得到相对更优的行为决策,避开障碍物、威胁目标等,安全到达终点。智能导航主要解决的问题包括:
对UAV在空间中的位置、速度、方向和环境信息的精确自主检测,即环境感知与定位问题;
对获得传感器信息的智能分析及环境模型的建立,即环境建模问题;
对导航信息进行综合处理,合理选择导航模式,提高导航定位的精度,即导航方式决策问题;
智能规划飞行的路径,即航路引导决策问题;
处理环境模型中的不确定因素和轨迹中出现的误差,降低外界物体对UAV的影响,即智能管理问题。
1.1 环境感知与定位
环境感知与定位模块用于获得多种外部激励,代表着UAV的感知能力,是实现其智能导航决策的基础。环境感知与定位是指UAV在空间中的自身定位以及环境信息的精确自主检测,并给出自身的绝对定位信息、与它平台的相对定位信息、障碍物的信息、威胁物信息、地形信息以及目标信息。UAV的导航定位信息通过自身装载的平台导航装备提供;UAV之间的相对导航信息通过编队导航装备提供;目标信息、障碍物信息、地形信息等借助于激光跟踪系统、红外传感器、视觉系统、雷达系统等获得,提供环境信息的导航源如图2所示。
通过对自身定位信息和环境信息的重构和滤波,提供各UAV的自身定位信息以及UAV之间、UAV与目标、UAV与障碍物、UAV与威胁物之间的相对方位、距离、速度等信息,用于智能导航决策。
1.2 环境建模
环境建模是指通过对导航传感器获得的绝对导航信息、相对导航信息、目标信息、威胁信息、地形信息等战场态势信息建立影响UAV导航决策的环境约束模型,其中包括自身模型、地形模型、威胁模型、目标模型、其他UAV模型等。
(1)自身建模:主要指自身飞行安全(如最大速度、过载、攻角的检测与保护)以及资源和时间的分配等,构建UAV自身性能约束集合;
(2)地形建模:主要指利用合成孔径雷达扫描陆地地貌,获得一定范围内地表的雷达扫描图像,得到地形约束条件(如山体、高建筑等),构建无碰撞飞行路径地形约束集合,用于支撑地形匹配和地形规避功能;
(3)威胁建模:主要指对UAV产生威胁的一些障碍(如敌方防空阵地、雷达区域、导弹、敌机等),构建威胁评估约束集合;
(4)目标建模:根据不同目标种类和状态,构架目标约束集合,包括目标部署区域、目标的时效性、目标价值、目标威胁等;
(5)系统中其他UAV建模:在UAV协同机动、协同探测、协同攻击、编队飞行等过程中,相隔通信距离、安全半径、编队队形、任务目标分配、冲突避免等都是必须要考虑的。
1.3 航路引导决策
航路引导决策是指根据态势评估结果,在满足某种性能指标最优或者准优的前提下,采用一定的航路产生方法,寻找一条在设定区域内从始点到终点经过所有可达点的最优或近似最优的无碰撞路径,完成当前UAV所需要的任务。
1.4 导航方式决策
UAV智能导航首先需要确定采用什么样的导航方式进行导航定位。可采用的导航手段有GNSS导航、测距测角导航、INS/数据链导航、INS/GNSS导航、INS/GNSS/机载数据链导航、视觉导航、激光导航、磁导航等。由于单一的导航手段容易受本身技术体制、精度的限制,其导航精度难以满足不同应用环境下编队导航定位的需求。为此,采取综合导航技术,综合利用各导航传感器获得的导航信息,进行综合应用,获得高连续、高可靠、高精度的导航信息,满足UAV自身定位与导航决策的需求。
1.5 智能管理
智能管理是指自主处理环境模型中的不确定因素和路径规划中出现的误差,使外界物体对UAV的影响降到最小。同时,在碰到障碍物、导航源失效等情况下,发出警告信息。
2 航路引导决策
2.1 性能评估
进行导航决策的评价因素包括路径长度、威胁大小、碰撞概率、任务完成概率等,所以在进行导航决策评价过程中,根据战场环境需求以及侧重点,综合多种导航决策评价指标进行评估。
2.2 智能导航决策流程
UAV在协同探测、协同攻击、信息共享过程中,系统对环境信息的采集存在即时性,所以,预先规划航路方法无法适应UAV动态环境的需求。UAV在进行环境感知,获得新的态势信息时,需要进行实时的导航决策,以应对诸如动态障碍物、动态威胁、动态目标等状况。智能导航决策流程如图3所示,其基本思路如下:
(1)UAV根据预知的态势信息,进行预先导航方式规划、预先航迹规划;
(2)UAV导航传感器进行实时感知,获得周围环境信息,包括威胁、目标的实时动态信息;
(3)UAV根据获得的威胁及目标的动态信息,按照一定的规则,建立环境模型;
(4)UAV根据自身导航传感器获得的导航信息,进行导航模式决策;
(5)UAV采用一定的推理规则,进行自主决策,重新进行航路引导决策;
(6)智能处理环境模型中的不确定因素。
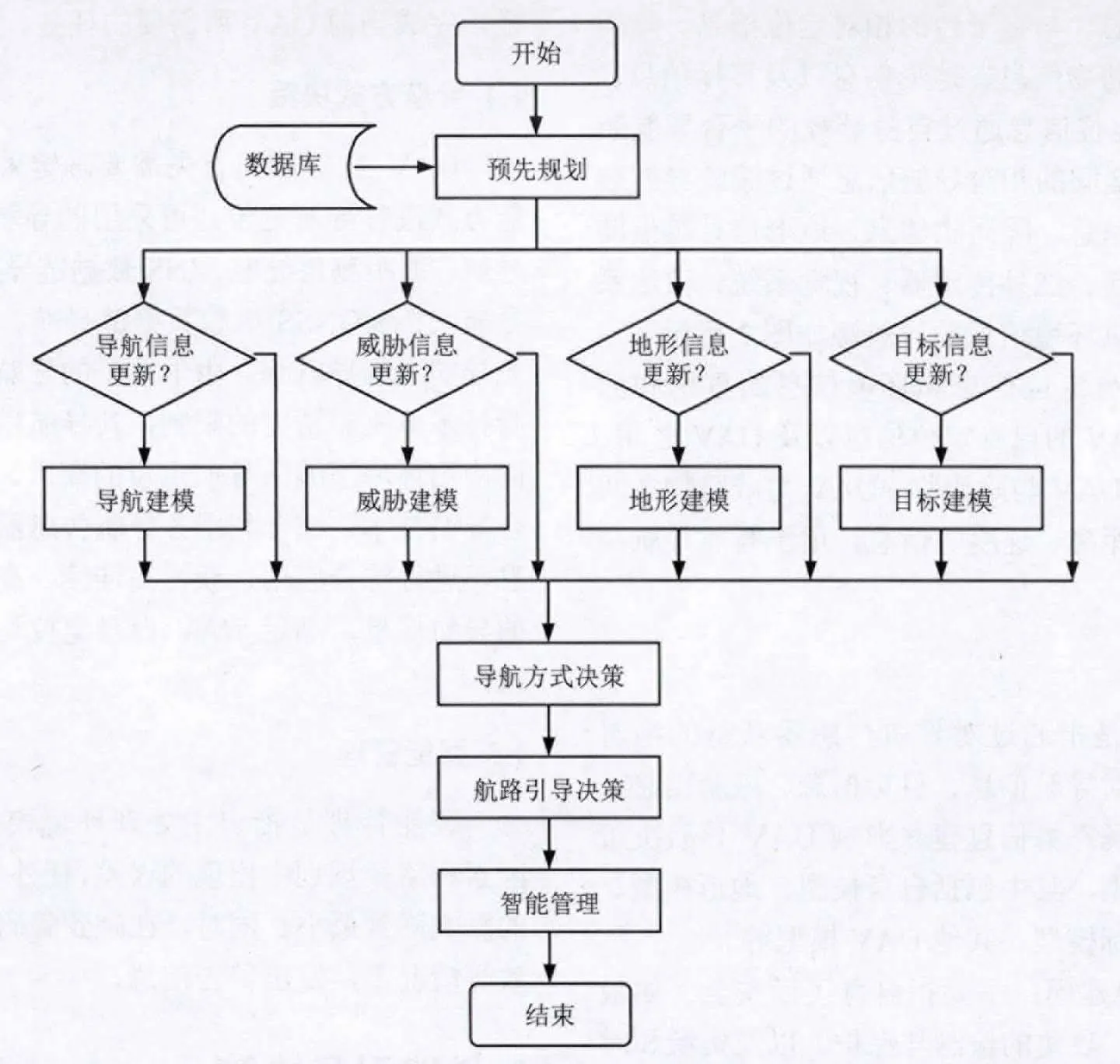
图3 智能导航决策流程
2.3 航迹规划建模
采用人工势场法构造目标位置引力场和障碍物斥力场共同作用下的人工势场。搜索目标函数的下降方向来寻找无碰撞路径。
设UAV的位置为;目标的位置为;第i个障碍物的位置为,表示障碍物的影响范围。那么目标引力函数为:

所受的斥力场函数为:

式中,attk和repk分别表示引力常数和斥力常数。
3 智能导航仿真
3.1 战场想定
战场环境如图4所示。UAV起始点位置用“○”表示,终点用“☆”表示。以UAV起点为坐标原点,建立图4所示的二维坐标系。图4中标注了五个预知障碍物的势场。UAV上装备的部分导航设备有GPS/INS、红外传感器、激光跟踪系统、雷达系统。
UAV利用GPS/INS信息进行自身定位,以及UAV之间的相对定位;UAV可以在传感器一定的作用范围内通过雷达、激光跟踪系统、视觉传感器系统探测到障碍物信息、目标信息,并对其进行定位。在各传感器有效的情况下,航迹规划图如图 5所示。
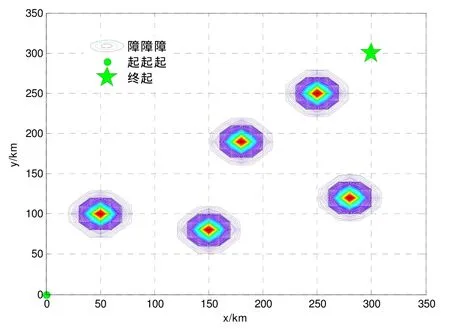
图4 环境设置
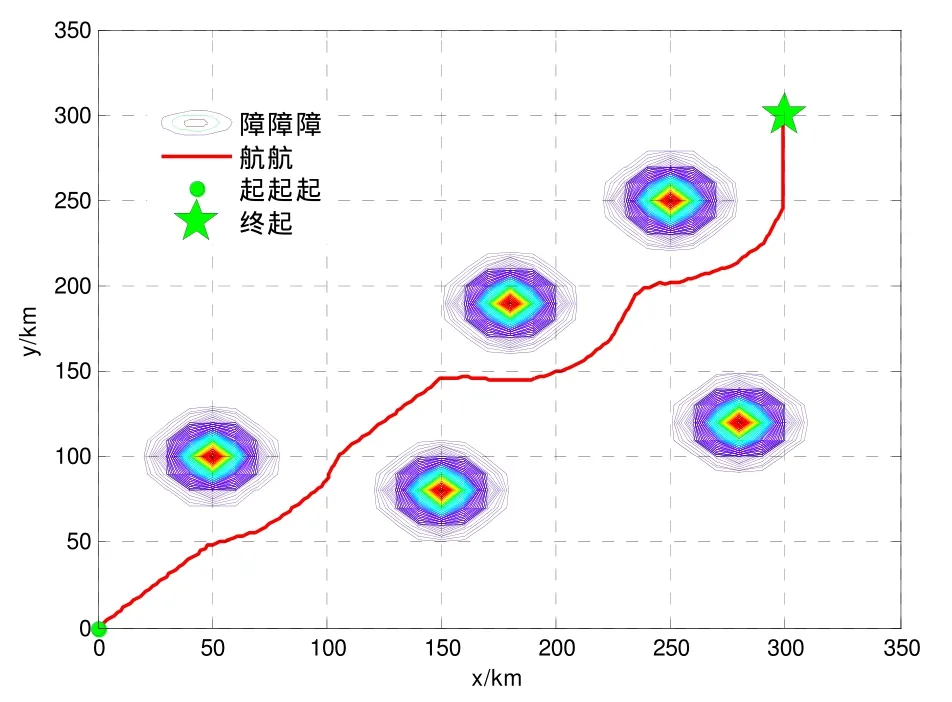
图5 UAV 航线规划图

图6 UAV 航线规划图
在UAV飞行到第三个障碍物的过程中,遇到突发障碍物,进行重新规划航迹,航迹规划图如图6所示。
图5和图6表明,在各传感器有效的情况下,UAV能找到一条平滑的、无障碍航迹。UAV沿此航迹飞行过程中,能有效规避障碍物,安全到达目的地。同时,也说明了采用智能导航方式进行航迹规划的有效性。
4 结束语
对综合导航技术及智能Agent技术进行研究,建立了基于Agent的智能导航决策方法,其中包括环境感知与定位、环境建模、航路引导决策、导航方式决策、智能管理等模块,并给出了智能导航控制流程。最后,给出了一种基于人工势场的导航决策方法,实现了UAV能够根据环境、威胁、目标、任务等导航决策约束条件进行航迹建模,并进行了仿真验证。
[1] 吴德伟, 邰能建, 戚君宜. 基于认知理论的UCAV智能导航研究新进展[J]. 空军工程大学学报(自然科学版),2011, 12(4): 52-57.
[2] 郭凤娟. 基于Holon的编队导航智能控制技术[J]. 现代导航, 2013, 4(1): 33-36.
[3] 刘铭, 徐杨, 陈峥等. 基于Multi-Agent系统的多飞行器协同路径规划方法的研究[J]. 计算机科学, 2012, 39(1):219-222.
[4] Fredrik Heintz, Jonas Kvarnstr, Patrick Doherty. Bridging the sense-reasoning gap: know-stream-based middleware for knowledge processing[J]. Advanced engineering informatics, 2010. 24(1): 14-26.
[5] Campbell S F. Steering control of an autonomous ground vehicle with application to the DARPA urban challenge [J].Massachusetts Institute of Technology, 2007.
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
青年歌声(2019年12期)2019-12-17
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27
