频标偏移对GNSS接收机捕获性能的影响分析
2014-07-23 03:18:18满丰
现代导航 2014年2期
满丰
(中国电子科技集团公司第二十研究所,西安 710068)
0 引言
频标在 GNSS(Global Navigation Satellite System)接收机中起着至关重要的作用,为接收机提供参考频率信号,使频率综合器产生下变频所需的本振信号和相关器的参考时钟频率信号。频标的偏移会导致一个等效的多普勒误差效应,当该误差较大或超出接收机的捕获范围时,就会导致接收机收星困难或无法收星。
本文描述了频标的特性及产生偏移的原因,结合接收机的捕获原理,通过理论计算和 MATLAB仿真,分析了频标偏移对接收机射频下变频通道和基带信号处理部分产生的影响,并提出了接收机的设计建议。
1 频标的特性及偏移原因
1.1 频标的特性及表征
频标是指能够提供较高精度的单一频率振荡信号的装置,其频率值通常为 5MHz、10MHz和20MHz等。常用的频标为高稳石英晶体振荡器和原子钟,主要表征如下:
(1)频率准确度:在规定的时间内,由于规定的工作和非工作参数全部组合而引起的输出频率与给定标称频率的最大相对偏差,包括由频率温度稳定度、频率老化率、频率电压特性和频率负载特性等共同造成的最大频差。其表达式为:

式中,y为频率准确度,fx为频标的实际输出频率,f0为频标的给定标称频率。
(2)频率稳定度:任何频标,频率并不是绝对的稳定,该指标是用来定量描述输出频率受噪声影响而产生随机起伏程度的量,数学表征用 Allan(阿伦)方差的平方根值。分为长期稳定度、短期稳定度和瞬间稳定度三种。阿伦方差计算公式如下:(采样间隔通常小于5s,测量m+ 1个数)

式中,σy(τ)为频率稳定度,f0为频标的给定标称频率,fi(τ)和fi+1(τ)为相邻采样时刻的频率值。
(3)相位噪声:频率稳定度的频域表征方式,用单边带内的功率来描述频率的不稳定情况。设f为偏离载频的频率值,那么
(4)开机特性(频率稳定预热时间):指开机后一段时间(如5min)的频率到开机后另一段时间(如1h)的频率的变化率,表示了频标达到稳定的速度。
(5)频率老化率(频率漂移):在恒定的环境条件下测量频标频率时,其频率和时间的关系,其频率偏移的速率叫老化率,可用规定时限后的最大变化率或规定的时限内最大的总频率变化来表示,通常用日老化率、月老化率、年老化率和 10年老化率来表征。
1.2 频标偏移的主要原因及模型
频标偏移的主要原因是频率老化。老化引起的原子钟的频率偏移远低于石英晶体振荡器,但出于体积和成本的考虑,GNSS接收机通常选用晶体振荡器作为频标。下面对频标偏移的描述都基于晶体振荡器(以下简称晶振)。
晶振的老化是不可避免的一个问题,振荡频率越高,所用的晶体片越薄,老化就越厉害,偏离准确频率的速度也越快,晶振的准确度也就越差。
晶振的老化率与连续运行的时间有关,随着运行时间的加长,曲线会逐步趋于平坦,老化率会越来越低。老化的原因是多方面的:
(1)石英材料本身就存在老化效应,任何微小的变化都会引起可观的频率偏移;
(2)弛豫效应,加在石英片上的机械应力变化时,也会引起频率的偏移;
(3)金属电极与封装盒中残留物质的化学反应;
(4)石英晶体表面由于加工而产生的裂纹;
(5)流过谐振器激励电流的变化会使污染物从石英片上抖落下来的速率、缺陷在石英片中迁移的速率及石英片的温度发生变化;
(6)此外,振荡电路和恒温控制电路中的有源和无源器件老化也会使晶振产生定向偏移[8]。
晶振的老化主要历经以下过程:
(1)温度梯度过程,在热平衡后持续几分钟到几小时;
(2)压力释放过程,持续三天到三个月;
(3)晶体极板质量变化过程,持续几周到几年;
(4)长期变化过程,由晶格不完善导致的晶体结构变化引起[7]。
大多数晶振的老化特性是呈对数变化规律,其老化模型的数学表达式为:

图 1为按式(4)绘制的某型晶振的老化特性曲线,从图中可以看出,老化效应一般可以区分为前期和后期两部分,后期老化较之前期老化趋于平坦,老化率逐渐降低。

图1 晶振的老化特性曲线
2 GNSS接收机捕获原理
以GPS卫星导航系统为例,由于卫星在空间轨道上约12 h绕地球一周,因此,即使地面接收机固定不动,与卫星之间也存在着相对径向运动,何况接收机载体(用户)也多是运动的,如车载、船载、机载等,所以接收机与卫星之间总是存在着相对径向运动。有相对径向运动存在,就一定会发生多普勒效应。同时,频标偏移也会引入一个等效的多普勒效应。因此,在多普勒公式(5)中加入频标偏移带来的接收机频偏,得到式(6):
式中,fd(t)为多普勒频率,f0为标称载波频率,v(t)为卫星相对于静止用户的视线运动速度,c为光速,foffset为频标偏移带来的接收机频偏。假设地面静止用户接收GPS卫星发送的L1频点导航信号,其载波频率为 1575.42MHz,当且foffset=0Hz时[3],得到
GPS接收机天线收到的实际卫星信号载波频率为 1575.42MHz±4.85kHz。对于静态用户,fd最大设计值一般为±5kHz,而对于中、低动态用户,fd最大设计值一般为±6kHz。
由于多普勒效应,卫星导航信号的载波频率和码相位不断变化。接收机中的微处理器程序控制相关通道,同时对卫星信号的载波频率和码片进行二维搜索。具体方法是:在卫星信号载波中心频率的±5kHz频率范围内,以500Hz为搜索间隔,每间隔500Hz设置一个本地载波频率点。在每个设置的本地载波频率点上,程序设定本地伪码发生器产生一颗卫星的码,在码周期结束时对码延迟锁定环路的累加计数器读数I(n)、Q(n)进行相关检测,即计算[I(n)]2+ [Q(n)]2值,若没有超过捕获门限值,则判伪码没有相关,即没有检测到卫星信号。再控制本地码延迟移动1/2码位,重复上述相关检测过程,直到移动2046次把一个码周期(1023码位)相关检测完。如果还没有检测到卫星信号,再换一颗卫星,直到 24颗卫星都搜索完,若仍没有发现卫星信号,控制载波数控振荡器频率跳500Hz到相邻的另一个载波频率搜索点,重新开始进行码和码片搜索。如此重复地控制相关通道进行二维搜索,直到某一次检测到 [I(n)]2+ [Q(n)]2值超过捕获门限,立即停止码位移动,并在这一点上连续重复检测多次,若多次均超过门限,则判为搜索到了卫星信号,相关通道转入牵引工作状态。在牵引工作状态,载波锁定环路和码延迟锁定环路闭环工作,如同跟踪状态一样,朝着使 [I(n)]2+ [Q(n)]2值增加的方向,牵引本地载波频率和本地码相位,当载波达到同步和码几乎重合时,[I(n)]2+ [Q(n)]2将达到最大值1,这时立刻转入锁定跟踪工作状态[1]。
由接收机的捕获原理可以得知,多普勒频率越小,接收机捕获速度越快;当多普勒频率大于接收机的搜索范围时,接收机无法检测到卫星信号。
3 频标偏移对捕获性能的影响
3.1 频标偏移对射频下变频通道的影响
GNSS接收机的射频下变频通道通常采用经典的超外差结构,通过二次下变频,将接收的GNSS卫星信号转化为数字电路部分易于处理的低中频信号IF。其中,频标为核心元器件,通过频率综合器,产生用于下变频的一本振LO1和二本振LO2。如图2所示。
当频标存在偏移时,LO1和 LO2会偏离设计值,并最终导致IF偏离设计值,影响后端电路的正常工作,造成接收机捕获困难或无法捕获。

图2 传统的超外差下变频通道
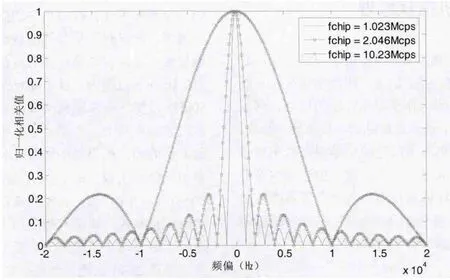
图3 频偏对伪码相关值的影响
式(7)为频标偏移时,接收机频偏量的计算公式:
式中,foffset是IF偏移量(即接收机频偏量),fLO1是一本振设计值,fLO2是二本振设计值,fref是频标标称值,refoffset是频标偏移量。
假设频标为TCXO,标称值为10MHz,由于老化原因,其偏移量为30Hz,fLO1为1435MHz,fLO2为136MHz,通过计算,得出foffset为4.713kHz,那么由式(6)可知,≈4.85kHz+4.713kHz=9.563kHz,对于静止用户而言,超出了接收机±5kHz的频率捕获范围,导致接收机无法正常捕获卫星信号。
3.2 频标偏移对基带信号处理部分的影响
卫星导航接收机的基带信号处理部分主要是完成对载波多普勒和码相位偏移的捕获和跟踪,以实现本地参考信号的载频和码相位与卫星信号的精确同步,解调出数据电文。载频的精确同步可以获得高增益的伪码相关值。精确、快速估计卫星信号的载波频偏是卫星导航接收机的首要工作和伪码相位同步的必要前提,对于接收机的实时工作具有重要意义。
除去卫星系统的动态产生的多普勒效应,频标偏移使得接收载波和本地载波存在频差,导致接收中频信号存在频偏,该频偏会对基带信号产生幅度调制,使直扩信号的极性发生翻转,降低信号的码相关峰值和检测概率。
假设接收伪码和本地伪码的相位完全对齐,相关器的归一化幅频响应为[5]:
式中,fd为频偏,M为伪码周期,Tc为伪码码片长度(Tc= 1 /fchip,fchip是伪码速率)。当伪码周期为1023个码片,积分时间为1个伪码周期时,假设伪码速率分别为 1.023Mcps、2.046Mcps和10.23Mcps,利用MATLAB仿真得到的相关器归一化响应随频偏的变化情况如图3所示。可以看出:
(1)幅值下降速度随着码片速率的提高而变慢,高码速率信号比低码速率信号具备更强的抗频偏能力;
(2)相关值会随着频偏的增大而迅速下降,且每当载波频差增大到一定值时,幅值便会出现一个零值,造成不能检测到卫星信号。
4 结论
在GNSS接收机中,受频标偏移因素的影响,射频下变频通道的末级中频信号和基带信号处理部分的相关器幅频响应发生改变,影响了接收机对卫星信号的检测。因此,为了降低频标偏移造成的影响,一方面,应根据接收机的实际工作环境,选取频率稳定度高且老化率低的频标;另一方面,在接收机捕获时间满足要求的前提下,增大多普勒搜索范围。
[1] 李跃. 导航与定位——信息化战争的北斗星(第二版)[M]. 北京:国防工业出版社.2008
[2] Elliott D.Kaplan著, 邱致和, 王万义译. GPS原理与应用[M]. 北京:电子工业出版社. 2002
[3] 申光,李仰志,谷文飞. 高动态条件下伪随机码捕获的旁瓣虚警分析[J]. 信息与电子工程,2011,9(6):708-712
[4] 任江涛,夏传浩,洪一. 载波与码相位分离的载波频偏估计算法[J]. 合肥工业大学学报,2010,33(9):1359-1362
[5] 任江涛. 北斗接收机基带信号的捕获算法研究[D]. 硕士学位论文.合肥:合肥工业大学,2010
[6] 李春霞. 高动态条件下伪码相关特性及其应用研究[D].博士学位论文. 长沙:国防科学技术大学,2005
[7] 许齐庆. 晶体振荡器温频特性的改善[D]. 硕士学位论文.西安:西安电子科技大学,2010
[8] 邓志鹏. 石英晶体振荡器温度补偿技术的研究[D]. 硕士学位论文. 成都:西南交通大学,2012
猜你喜欢
杭州电子科技大学学报(自然科学版)(2023年3期)2023-06-30 06:57:34
航天电子对抗(2021年2期)2021-05-31 02:02:40
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子设计工程(2017年20期)2017-02-10 03:39:32
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
火控雷达技术(2016年3期)2016-02-06 02:30:36
探测与控制学报(2015年4期)2015-12-15 15:00:50
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44