
基于交叉解耦的滑模控制在磁轴承中的应用
2014-07-21 14:10:50刘峰王德明欧阳慧珉张广明袁宇浩
轴承 2014年11期
刘峰,王德明,欧阳慧珉,张广明,袁宇浩
(南京工业大学 自动化与电气工程学院,南京 211816)
相比于传统的滚动轴承, 磁轴承具有无磨损、无需润滑、刚度和阻尼可调等特性,因此广泛应用于高速旋转系统,如飞轮储能装置、控制力矩陀螺等。
主动磁轴承依靠绕组铁芯产生的磁力使铁磁体与磁极产生气隙以达到悬浮的目的,但由于磁体产生的吸力为非保守力,因此磁轴承系统本身为一个不稳定系统,需要通过控制器使主轴能稳定悬浮。在磁轴承的发展中对控制器及控制策略的研究相当多,滑模变结构控制因对系统参数摄动和外界扰动具有鲁棒性和自适应性,因而被广泛应用于主动磁轴承。文献[1]研究了滑模控制磁轴承系统的非线性和不确定性的解决方案,并且将滑模控制应用于单自由度的磁悬浮系统中;文献[2]讨论了在不同硬件特性下滑模控制方法对磁轴承系统控制的特性,把系统中存在的扰动归因于建模不精确和外部干扰,但没有考虑系统交叉耦合的影响;文献[3]应用滑模观测器对磁轴承的扰动量进行观测并且实现补偿,使用了基于PID控制的交叉解耦方法对系统进行解耦,并使用经过校正环节后的观测值对转子的不平衡扰动进行补偿,但控制与补偿系统的设计较为复杂。
针对磁轴承转子在高速旋转时产生的陀螺效应和由于转子的不平衡导致的扰动,设计了基于交叉反馈控制的滑模变结构控制器,实现了交叉解耦,提高了系统对干扰与陀螺耦合的鲁棒性,通过仿真证明该控制系统能准确地跟踪给定信号并且较好地抑制干扰。
1 磁轴承系统建模
假设系统使用的是刚性转子,执行器与放大器均为非饱和状态,以径向4自由度主动磁轴承为对象,建立转子关于两端轴承坐标系的系统运动方程。以转子质心O为原点建立空间直角坐标系O-xyz,以z轴作为转子在电动机驱动下的旋转轴;y轴方向对应于上下定子磁极;x轴对应于前后定子磁极。磁悬浮转轴的运动示意图如图1所示。

图1 转子运动示意图
广义坐标系下转子的运动方程为
drFdry,
(1)
式中:J,Jz为转动惯量;m为转子质量;ω为角速度;xc,yc,θx,θy分别为广义坐标系下转子的位移量和角位移量;a,b为两端的磁力到质心的距离;dl,dr为左、右不平衡力到质心的距离;Flx,Frx分别为左、右磁轴承在x方向产生的磁力;Fly,Fry分别为左、右磁轴承在y方向产生的磁力;由于加工装配工艺及精度的限制,转子在旋转时存在不平衡扰动,Fdlx,Fdrx分别为左、右端在x方向上的干扰力;Fdly,Fdry分别为左、右端在y方向上的干扰力。
由图1可知,由广义坐标系到两端坐标的坐标变换为
(2)
由(1),(2)式和电磁力的线性化方程可得转子的运动方程为
H=A-TMA-1,C=A-TGA-1,
(3)
Fdlx=c1drcos(ωt+ζ)+c2sin(ωt+φ),
Fdrx=c1dlcos(ωt+ζ)-c2sin(ωt+φ),
Fdly=c1drsin(ωt+ζ)+c2cos(ωt+φ),
Fdry=c1dlsin(ωt+ζ)-c2cos(ωt+φ),

2 基于交叉反馈的滑模控制器设计
交叉反馈控制[4-6]相比于鲁棒控制等集中控制方法,具有设计简单、工程上易于实现等优点,广泛应用于磁轴承系统的解耦控制中。由于具有耦合项的磁轴承MIMO系统的滑模控制较为复杂,不易于工程设计与实现,因此,可以将滑模控制与交叉反馈相结合,在解耦的基础上设计滑模控制器,降低设计难度,使系统在满足跟踪特性的同时减小耦合的影响。由(3)式可得
(4)

e=qL-qd,
(5)
设计切换函数为

(6)
Λ为切换函数系数矩阵,则
(7)
构造Lyapunov函数

(8)
则
(9)
结合交叉反馈控制原理设计控制输入为[4]
(10)
P=diag(kP,kP,kP,kP),
式中:P,D分别为交叉反馈控制的比例系数项和微分系数项;kcφ为交叉系数;kP为比例系数;kD为微分常数;ε为等速趋近常数;k为指数趋近常数。系统参数见表1。
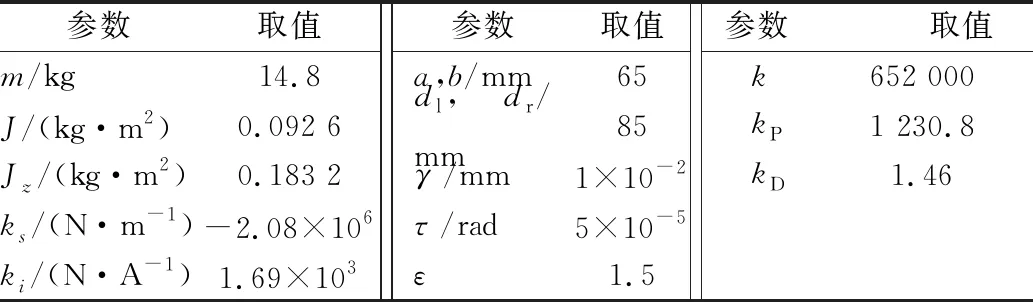
表1 磁轴承系统仿真参数
H-1[(KiP+Ks)qL-ks-εsgns+
DisFd-d]} ,
(11)
若满足条件
(12)
则(11)式可化为
(13)
dU=[dxlU,dxrU,dylU,dyrU],
dL=[dxlL,dxrL,dylL,dyrL],
设d应满足条件
(14)
则干扰上下界为
(15)

闭环系统控制框图如图2所示。
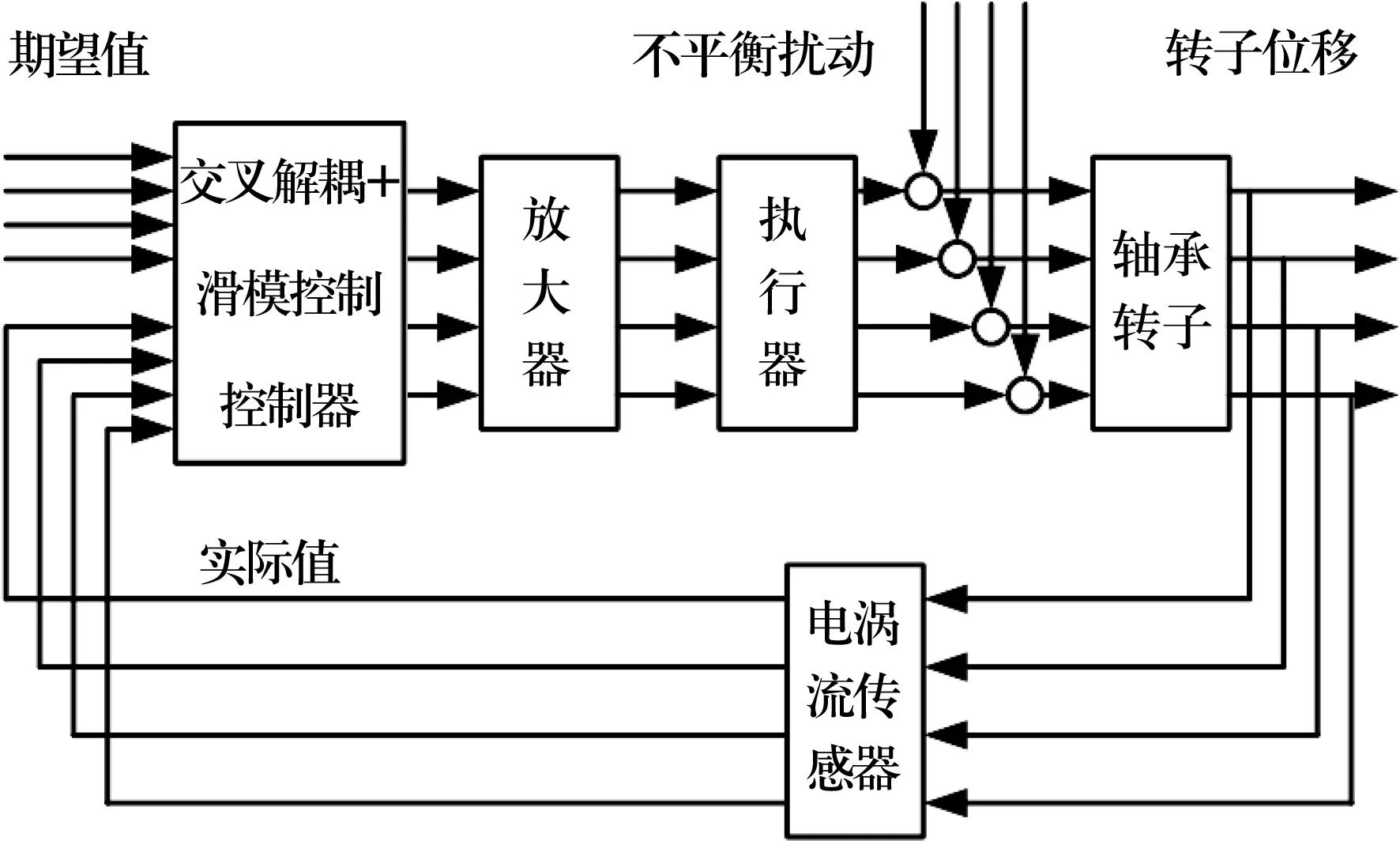
图2 交叉滑模控制系统框图
同时,为了验证交叉滑模控制性能,对比了传统带交叉反馈的PID控制器对磁轴承系统的分散交叉控制。单自由度上PID控制算法为

3 仿真与讨论
根据(13)式,若系统的干扰项在上下限[dL,dU]范围内,则设置相应的上下限值可使系统满足稳定性条件。由(12)式可得切换系数矩阵为
Λ=-(H-1KiD-H-1C)。
(16)

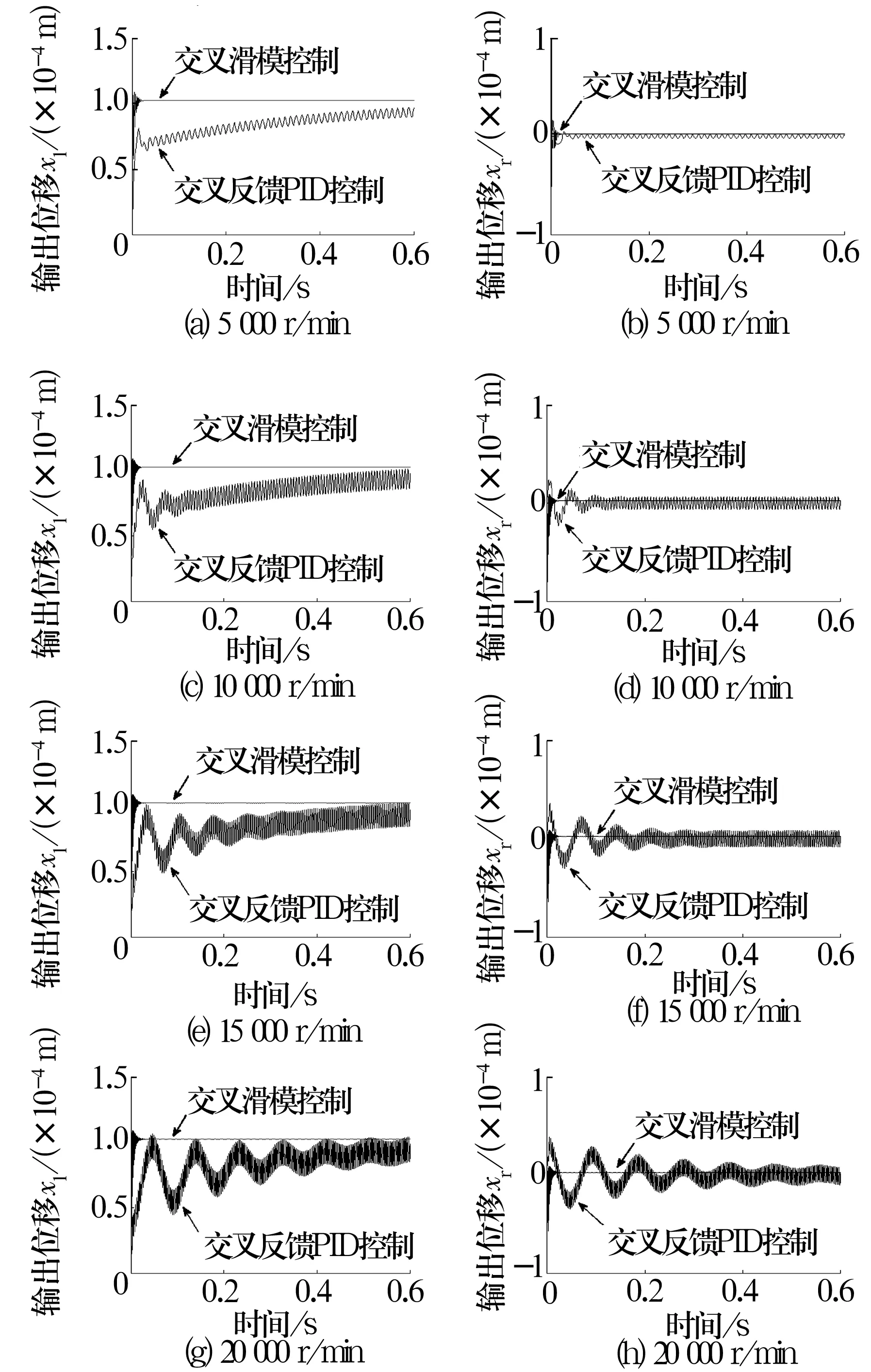
图3 不同转速下转子的位移阶跃响应
由图3可知,滑模控制的响应时间远小于PID控制的响应时间,且稳态误差小于1%,满足使用要求。PID控制的初始响应速度较慢且抑制扰动的效果较差。由于使用了切换函数和指数趋近的趋近率,滑模控制可以降低系统位移误差,使到达段与滑模段的运动轨迹较平滑,其稳态特性也较好,同时,通过调节系数k和ε可加快系统的趋近过程。由图3a,图3c,图3e,图3g和Fd的计算式可知,随着转速的升高,系统不平衡扰动力增大,但由于滑模上下界的控制,在设定的范围内滑模控制的位移轨迹收敛,是一个稳定的过程。由于存在陀螺效应,左端转子的位移与右端转子的位移形成耦合。由图3b,图3d,图3f和图3h可知,使用带交叉反馈的PID控制时右端转子位移响应为衰减振型,且振荡周期远大于使用交叉滑模控制时的振荡周期, 因此,所设计的基于交叉解耦的滑模控制器可在减小系统误差的同时降低耦合的影响。
在不同转速下xl方向的位移误差相轨迹如图4所示。由图可知,当转速升高时使用交叉滑模控制的系统主轴的振动加快且振荡周期增大,但系统响应曲线仍为衰减振型且误差趋向于零。
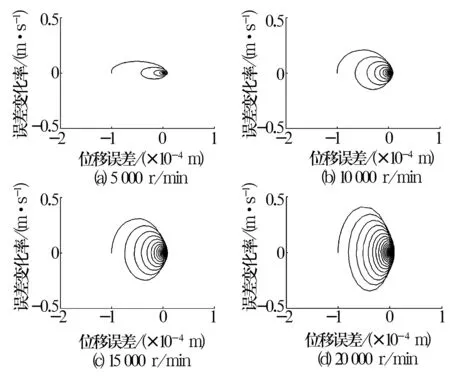
图4 xl方向转子位移误差相轨迹
4 结束语
针对转子陀螺耦合效应、不平衡扰动,应用Lyapunov稳定性定理构造了基于交叉反馈控制的滑模控制器。通过对使用该控制方法的磁轴承系统进行仿真可知,系统的跟踪特性和抗干扰特性较好,与传统的带交叉反馈的PID控制相比具有较好的稳态精度;应用了基于扰动上下界的滑模控制方法,提高了系统在干扰输入时的稳定性;当转子的干扰在设置的不平衡扰动的上下界范围内时,系统可获得对不平衡的干扰及陀螺耦合的鲁棒性,具有实际的应用价值。由于磁轴承系统普遍存在非线性现象,且该特性的确定较为复杂,而滑模控制是解决该问题的一种较常用的且效果较好的控制方案,因此,应用基于交叉解耦的滑模控制解决系统的非线性问题将是接下来研究工作的重点。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
数学物理学报(2019年4期)2019-10-10 02:38:56
学生天地(2019年6期)2019-03-07 01:10:46
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
军事文摘(2018年24期)2018-12-26 00:58:18
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
快乐语文(2018年36期)2018-03-12 00:56:02
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
