遥控式叉车用吊钩的设计概述
2014-07-17 06:52:06淮阴工学院姜海林陈李耿中钱坤施云葛玉婷
河北农机 2014年7期
淮阴工学院 姜海林 陈李 耿中 钱坤 施云 葛玉婷
引言
叉车是工业搬运车辆,是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆。叉车通常可以分为三大类:内燃叉车、电动叉车和仓储叉车。叉车的使用范围非常的广泛,所以叉车的辅助产品开发也是多多益善。本产品的设计从安全、体积、重量以及装卸方便程度考虑,从而保证遥控吊钩的安全性和实用性。
1 设计图纸
图1、图2为产品设计的俯视图和主视图,其工作过程是:吊钩在叉车作用下缓慢升起,到了某一位置,需要货物旋转方向,此时,驾驶员或者其他工作人员可以轻松拨动手中的叉车旋转式遥控器,进行对1电动机控制,电动机旋转,在齿轮带的联结下,大齿轮4开始旋转,从而轴12,10开始运转,在轴10与吊钩是螺纹联结下,吊钩开始转动,从而货物开始旋转,实现货物的自动旋转。
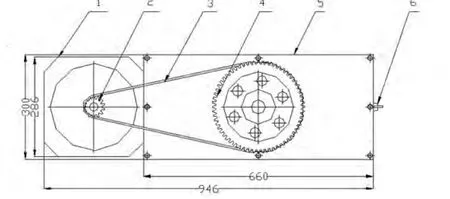
图1 俯视图
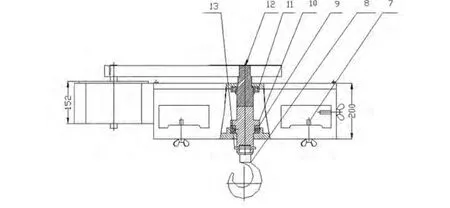
图2 主视图
2 产品介绍
2.1 电动机选择
2.1.1 伺服电机70 T D Y060

型号电压V频率H z输入电流A输入功率W转速r/min最大转距mn.m70T DY060额定转距mn.m启动转距mn.m重量k g220500.1224609508004801.6电阻Q/W1.5K/16
伺服电机优点如下:
a.交流伺服电机的控制精度由电机轴后端的旋转编码器保证;
b.交流伺服电机运转非常平稳;
c.在低速时也不会出现振动现象;
d.交流伺服电机具有较强的过载能力。
2.1.2 力矩电机:57 B Y G H627
a.长期运行可靠性;
b.精度高,即使在极低转速也无需齿轮系统;
c.运行安静、平稳;
d.设计紧凑、适应性强;
e.高速定位系统、低速大扭矩转速控制系统、最佳扭矩在高速度的定位系统。
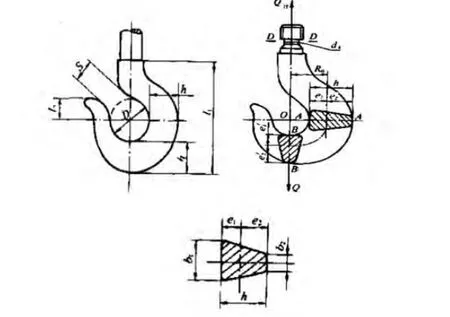
图3 吊钩分析图
2.2 吊钩
首先产品载重5吨,查询资料,选用了一个简单的吊钩。验算 A-A,B-B两个断面的强度等级 P,σs=315 M P a,钢号D G20 M n,钩号4,如图3所示。
2.3 轴承
根据轴承所受载荷的大小、方向和性质,轴承的调心性,轴承的刚性,轴承的转速初步确定轴承型号:推力圆柱棍子轴承9216。轴承参数:类型:推力圆柱滚子轴承。内径:80 m m,外径:115 m m,厚度:22 m m,保持架及其材料:钢板滚动体列数:多列滚道类型:凸度滚道,轴承材质:高温轴承钢。
2.4 轴及其参数
材料为45 C r,调制处理,直径80 m m,与轴承采用过盈配合,剪切力500 M P a,疲劳强度600 M P a,预期寿命8年。
2.5 控制系统
采用51单片机,T B6560驱动器和120 W24 V直流电源控制电机旋转与角度。
3 结语
产品的基本原理不难,但是弥补了叉车市场的一项空白,结构的设计合理,加工简单并且可操作性强,节省了不少的人力。
[1]王晨光,孙运强,许鸿鹰.步进电机的单片机控制设计分析[J].国外电子测量技术,2008,09:39-41+60.
[2]徐益民.步进电机的单片机控制系统的设计[J].煤矿机械,2005,01:12-13.
[3]仲炽维.步进电机的单片机控制方法[J].自动化与仪表,1999,05:68-69.
猜你喜欢
华人时刊(2023年11期)2023-07-29 06:27:38
中国储运(2022年6期)2022-06-18 10:29:00
中国特种设备安全(2021年12期)2021-04-26 14:37:06
山西冶金(2020年3期)2020-07-15 04:15:04
广州大学学报(自然科学版)(2016年2期)2017-01-15 13:43:02
中国储运(2016年8期)2016-09-02 06:22:04
初中生天地(2016年36期)2016-02-06 06:52:32
铸造设备与工艺(2015年3期)2015-07-11 04:02:54
中国机械(2014年15期)2014-04-29 00:09:45
中学数学杂志(2011年12期)2011-02-01 06:30:08