基于TMS320F28035的电梯门机控制器设计
2014-07-16 08:54黄玉成
黑龙江工业学院学报(综合版) 2014年11期
黄玉成
(天津大学 电气与自动化工程学院,天津 300072)
随着经济不断发展,优势土地资源稀缺。高层建筑数量日趋增多,电梯作为建筑内的垂直运输工具,其重要作用不言而喻。而电梯门机系统的优良特性对整个电梯运输系统性能起重要作用,而门机控制器是门机控制系统的核心部件,设计一种运行平稳、快速安静、安全可靠的控制器具有很重要的现实意义。
本文采用TI的piccolo系列微处理器TMS320F28035为控制器的主控芯片,对其进行设计与实现。硬件系统设计和软件开发均充分考虑电梯门机运行的安全性和平稳性。对控制器的实验和测试表明此控制器能较好地达到门机的实际运行要求。
1 系统概述
电梯门机控制系统采用模块化的设计,由多个功能模块构成,其主要组成有主回路、PWM驱动输出模块、电流电压检测模块、人机交互功能、参数存取及门机状态信号处理模块、键盘及端子接口模块和故障检测及保护模块。系统设计整体框图如图1所示。
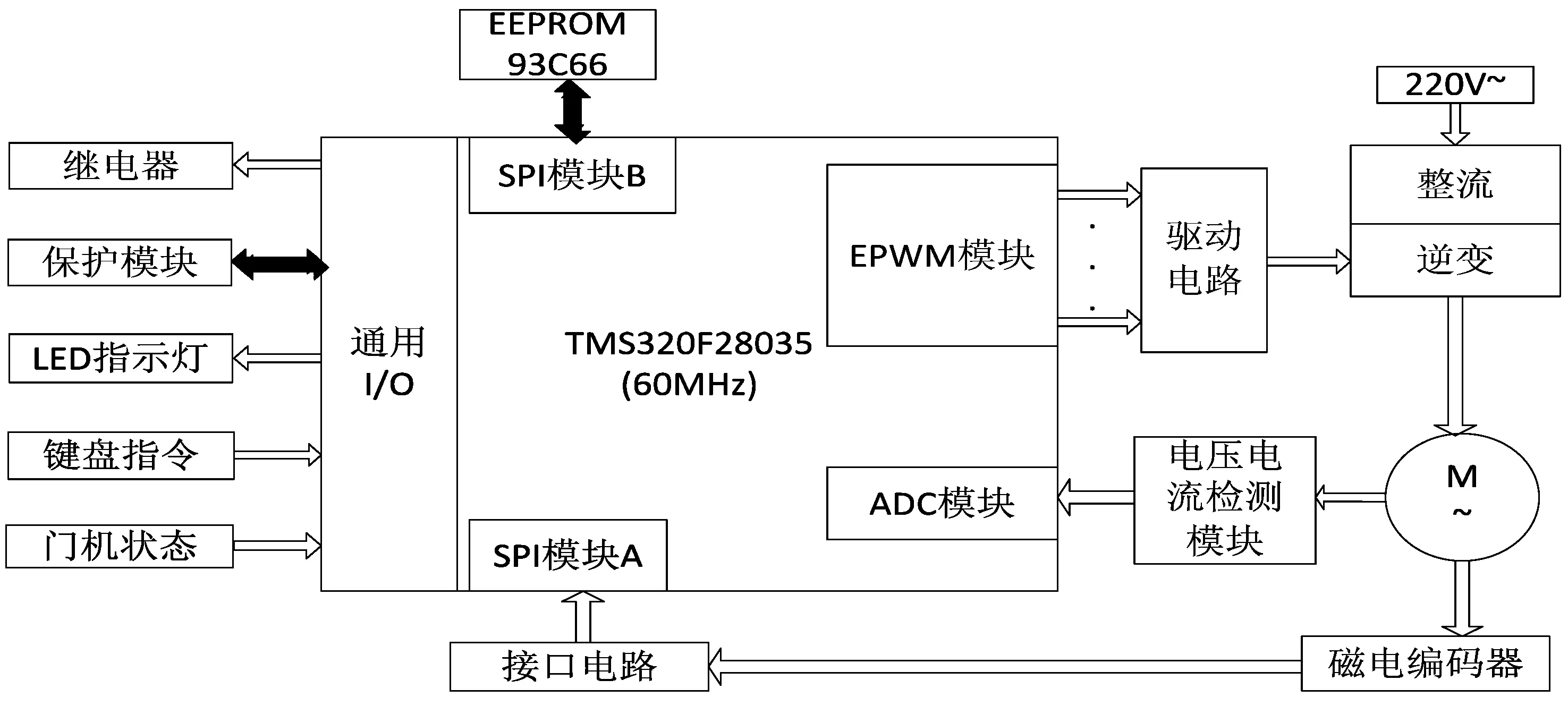
图1 电梯门机系统框图
本系统选用的是永磁同步电机作为带动门机的动力输出机构,永磁同步电机有良好的静态特性和高动态响应的特点,广泛应用在小功率驱动系统中。[1]门机控制器的设计目的就是满足实际产品运行的要求和条件,根据电梯门机系统的机械结构和运行标准,其功能要求为:
(1)电梯门机能跟随开关门速度曲线运行,门机控制器的主要作用是驱动电梯门完成开关动作,要求既要在避免门开合时发生碰撞,又能平稳快速地完成开关门动作。因此,系统需要给出速度曲线和良好的速度控制。
(2)在系统发生故障时,门机控制器设计有故障检测和安全保护功能,尽可能保证乘客安全,同时也能保护系统的自身安全。
2 硬件设计
根据电梯门机控制器的功能需求,设计了相应的控制器硬件电路。系统具有反馈信号多、运行换速过程复杂、参数量大等特点。考虑到以上这些特点以及实际运用的经济合理性,结合各款DSP芯片的功能参数,选择了TMS320F28035作为主控芯片。硬件电路主要由10M晶振、电源管理芯片TPS7333、带SPI接口EEPROM参数存储芯片93C66、JTAG编程仿真接口、键盘输入电路、数码管显示电路、电流电压检测电路、主回路的驱动电路组成。
TI公司出的piccolo系列微处理器TMS320F28035是一款高度集成且价格较为低廉的DSP芯片,CPU模块将接收来自系统各个模块的信息,对各路信息进行综合处理后完成对电机的控制、故障判断处理和信息状态显示。它的时钟频率可达60MHz,指令周期缩短到16.67ns,[2]由3.3V单电源供电,具有64k的片内flash可供装载程序;多达45个复用通用输入输出引脚可满足本系统输入输出状态、控制信号繁多的要求;两个相互独立的串行通信接口SPI模块,一个用来读取传感器输出位置、速度脉冲数,另一个用来对EEPROM进行数据的读写。增强型控制外设如ePWM、eCAP等模块为系统提供更强大的功能,该芯片快速中断响应可以提高系统响应速度和控制精度。
2.1系统主回路及电机驱动PWM模块设计。
系统主回路电路示意图如图2所示。图中由左端接入220V用电,整流桥BM1左侧设计了一个EMI滤波电路和一个软启动电路。EMI电路由两个压敏电阻RM1、RM2,两个电容C42、C43和一个共模电感LM1组成,EMI电路可以滤除外界电网的高频脉冲对电源的干扰,同时也可以减少开关电源本身对外界的电磁干扰。整流电路选用的是集成模块,整流输出后用三组大电容值电容和电解电容,以稳定直流电压。
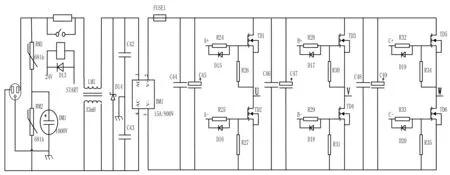
图2 主回路电路图
整流桥右侧是逆变模块,分别由六组增强型N沟道MOSFET管构成三组桥臂,输出三相与电机相连。A、B、C三组为DSP输出的PWM信号经过功率放大和光耦隔离之后,逆变模块的控制信号。
电机控制器中,主控芯片根据外部开关门指令信号及系统运行状态信号产生PWM信号,经过驱动隔离电路,从而控制电机工作。系统用F28035内置的高性能ePWM外设模块产生PWM信号。ePWM模块包含2组完整的ePWM通道:EPWMxA和EPWMxB。[3]芯片的7个ePWM模块通过一个同步时钟信号联系在一起,相互独立且不失同步性,当需要的时候可以将这些模块看做是分开独立的系统,另外这个同步信号也用于eCAP模块。如此一来,大大增强了主控芯片的扩展性。这里用其中三个事件单元产生同频率的三对PWM波形。
系统主驱动电路采用隔离驱动模式,将高压侧和低压侧用光耦器件进行隔离,以增强系统抗干扰能力。由于DSP输出的PWM驱动信号功率不足,需要经过功率放大,此处选择芯片74LS245,该芯片有8路同相三态双向总线收发器,可双向传输数据。光耦选择TLP250,最后将这6路PWM信号转化为三相逆变功率平台的栅极的驱动信号,控制IGBT导通和关断,最终实现电机转动,通过传动带带动电梯门动作。
2.2安全保护模块设计。
电梯门机的安全性关系到系统性能的好坏,所以故障检测及保护及其重要。在硬件电路中,设计了相应的功能模块,保护电路的主要任务是提供对瞬时过电流、过电压、欠电压的保护,作用是在对器件产生破坏性作用之前封锁PWM输出,随即进入停机状态,并通过数码管显示故障状态,有助于迅速查明故障。电路图如图3所示。其中用到可编程逻辑门阵列GAL16V8d,它是一种可编程逻辑器件,对其进行逻辑运算编程,可通过它实现数字逻辑运算的功能。
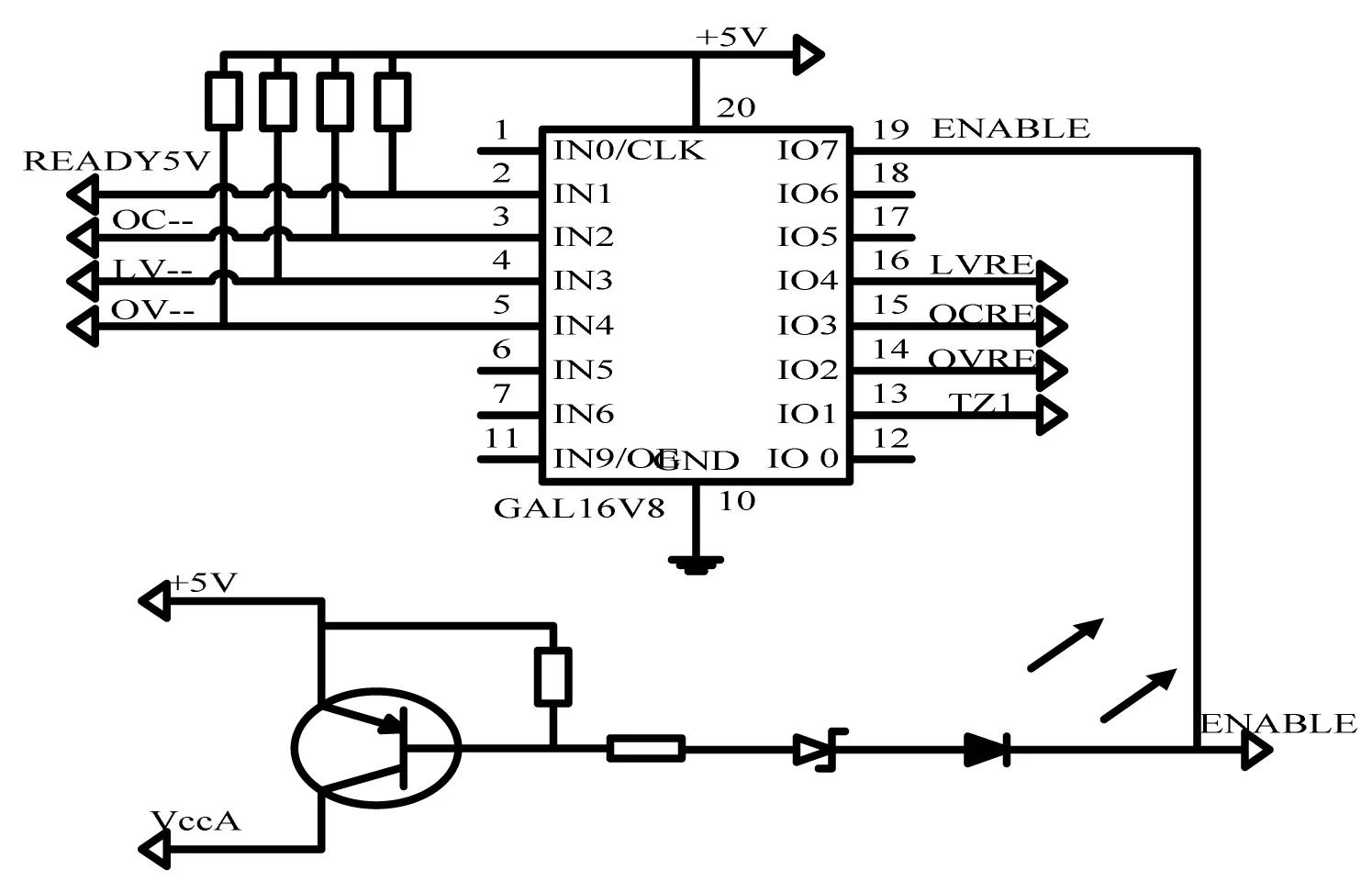
图3 故障时停止电机驱动输出电路
其中输入信号READY由DSP的一个通用I/O口输出,OC、LV、OV为过流、欠压和过压信号,分别由电流检测、电压检测电路产生。主回路输出发生短路时会引起过流现象,过压、欠压指的是直流侧母线电压故障信号。三路故障信号和READY信号经过GAL16V8处理后,一方面可输出故障信号,DSP接收到TZ(Trip-Zone)信号,产生故障中断,随即封锁PWM输出,只有软件复位或系统重新上电后才能将故障清除。过流、欠压和过压信号输入至DSP通用I/O口,最后在数码管显示;另一方面,保护电路输出ENABLE信号,使驱动电路的光耦模块电源输入VccA输出为低,关断光耦模块,切断PWM输出。
2.3电流检测电路模块设计。
设计中选中的电流传感器为TBC05SY闭环电流传感器,该电流传感器具有较强的抗干扰能力,可以测直流、交流和脉动电流。在5A额定电流输入下对应输出为4±0.5%。此传感器基于霍尔效应,具有测量范围大、连线方便、低功耗、体积小等优点。电流采样电路如图4所示。

图4 电流采样电路
图中HLA为一路电流传感器与控制主板的连线端子输出的一相电流信号,HLA先经过LF353一级放大电路后进入调零电路,而后经电压跟随电路输出,最后由DSP的A/D模块对其采样。图中的二极管将电位钳制在3.3V以内。电位器W01作电位调整之用,当封锁PWM输出时,通过调整电位器将电位调整到采样的中点,以此作为电流信号的零点。
2.4电机转速测量模块设计。
电机的速度和位置信息由磁电编码器测量输出,磁电编码器需与电机非接触式同轴安装。选择AS5040作为测量芯片,AS5040是一款无接触式磁旋转编码器,用于精确测量整个360°内的角度,此产品是一个片上系统,在单个封装内整合了集成式Hall元件、模拟前端和数据信号处理功能。这种绝对角度测量方式可及时指示磁铁的角位置,其分辨率达到0.35°。
DSP与编码器通过一个接口电路连接,编码器的输出数据由 DSP的一个串行外设接口(SPI)模块读入。电路设计方案如图5所示。
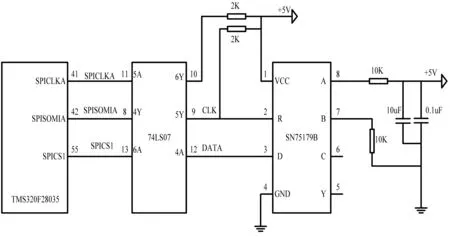
图5 编码器接口电路
电路图中信号通道为从右向左,磁电编码器的输出为A、B、Y、Z。输入到一个差分驱动接收器SN75179B ,该接收器具有高输入阻抗的特点,有良好的抗噪性能,通过差分作用,输出数据信号,随着时钟CLK信号,按照一定的时序,由DATA线输出编码器的脉冲数,经过电平转化后由同步串行外设SPI模块读入DSP中,在中断程序中进行电机位置计算和转速计算。
3 软件设计
电梯门是整个电梯控制系统中动作最为频繁的一个机构。针对电梯门机控制系统工作环境和工作对象的特殊性,系统要求实现快速、平稳、无冲击的开关门过程。本系统软件设计采用模块化的设计方法,包含了主程序及各个功能模块,主要实现门宽自学习、人机交互、参数存取、电机控制和故障处理等功能。控制芯片TMS320F28035具有比较丰富的可利用资源,使得编写的程序更加简单、灵活。本系统的软件设计在CCS5.0下,用C语言编译完成。
3.1主程序设计。
主程序是整个系统软件设计的主干,其他功能模块都是围绕主程序进行的。程序流程图如图6所示。工作过程为:系统上电后首先进行初始化,读取EEPROM中存放的各项参数值,之后开总中断,进入主循环程序。主循环依次为定时故障检测处理、自学习以及开关门程序,最后是信息交互功能。
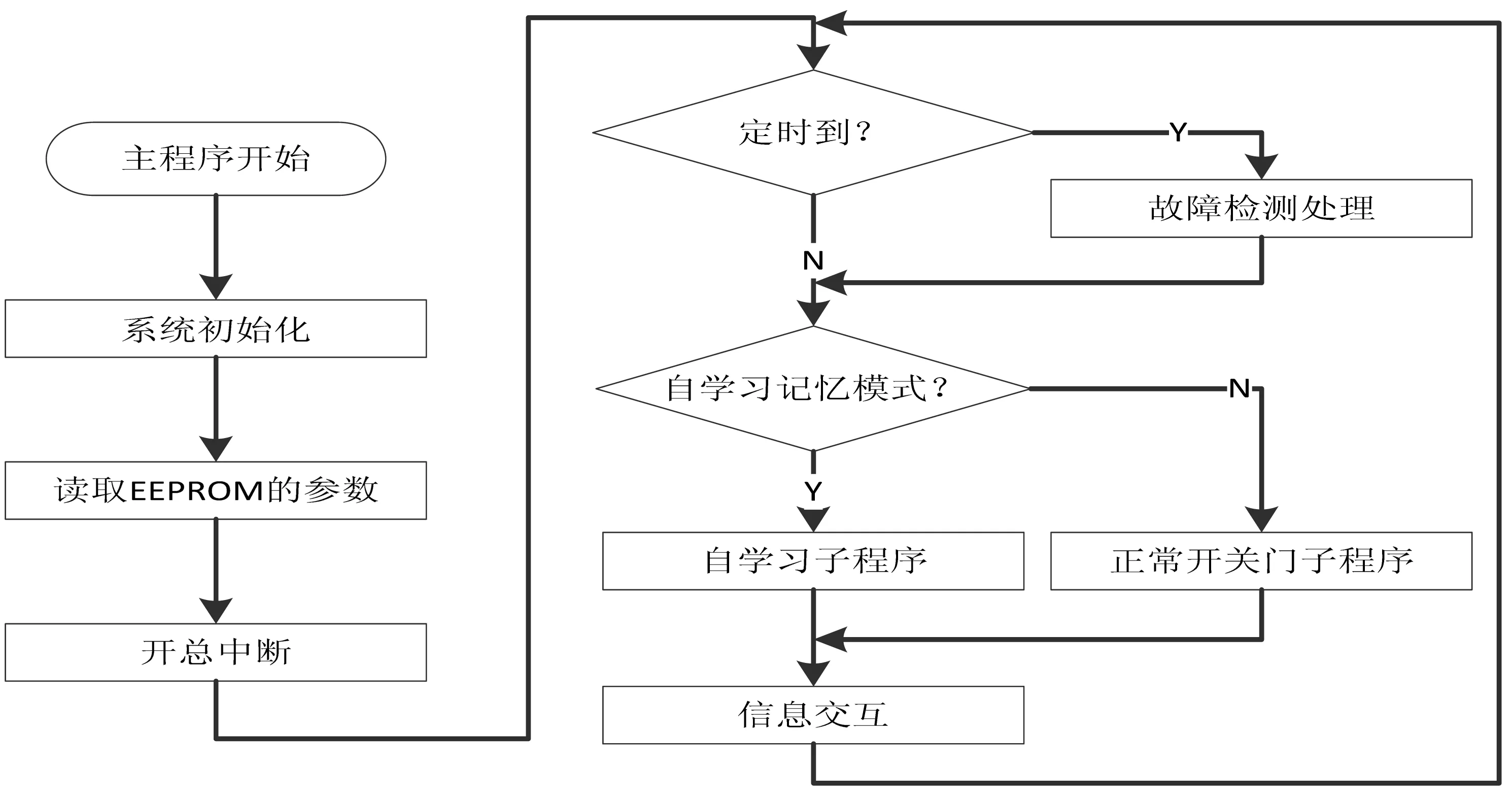
图6 主程序流程图
控制系统采用id=0的矢量控制方法,典型的双闭环结构,内环为电流环,外环为速度环。在id=0的控制策略下,电磁转矩只与定子电流的q轴分量有关,因此控制iq就能实现电机的转矩控制。[4]在速度闭环调节下,定子电流的频率输出由给定速度决定,给定速度越大输出频率越高。[5]
3.2中断程序设计。
中断处理程序主要为电机矢量控制,程序执行频率为16kHz,每62.5μs执行一次,程序中主要包括了电流和位置检测子程序、转速计算子程序、转速调节子程序、电流调节子程序、坐标计算变换、PWM调制填占空比等。流程图如图7所示。

图7 中断流程图
4 实验结果
实验平台为标准900mm门宽折中分门,门刀类型为同步门刀,所用的永磁同步电机参数为额定电压220V,额定频率50Hz,额定电流0.45A,额定转速115PRM,额定转矩3NM,26对极。正常开关门曲线如图8所示。
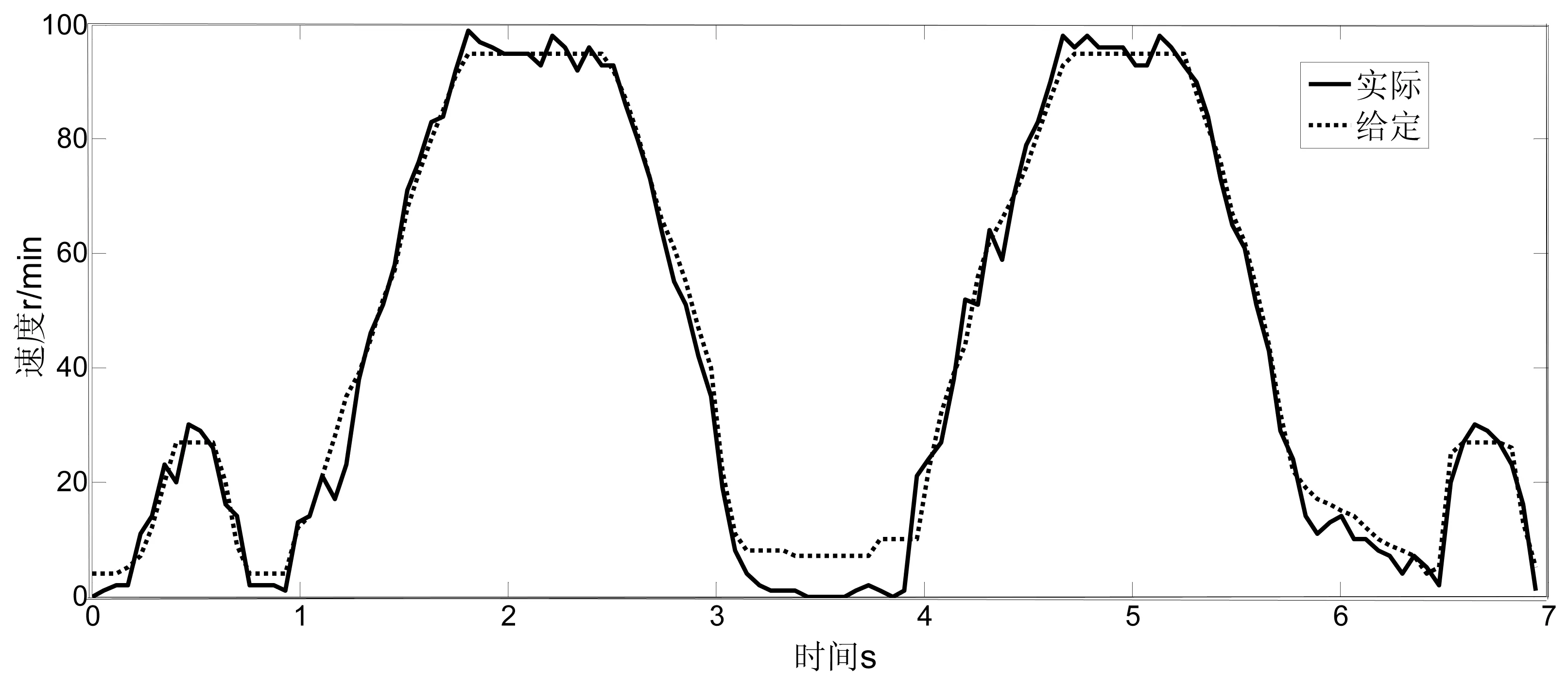
图8 电梯门机开关门运行曲线
结合门机的机械结构,在运行行程位置上选择适当的速度,既能避免高速撞击产生噪声,又能追求较高的运行效率和感官舒适度。要求电梯自动门机应按理想速度曲线自动调节开关门过程中的运行速度,电机运行速度由位置点查速度曲线表确定,设计的理想曲线如虚线所示,0-3.2s为开门过程,3.2-3.8s为门开齐低速推进过程,3.8-7s为关门过程。开门前段和关门后段的小曲线为缓冲阶段同步门刀收刀和放刀的过程,约为0.5s。
图中虚线为速度给定值,实线为实际测量值。整个曲线是一个完整的开门-关门动作。曲线是按照固定的频率采样,将取得的120个点绘制成曲线,从实际运行曲线可以看出,门机能够很好地跟随速度给定值平稳运行,其波动范围在控制精度的允许范围内。
5 结语
本门机控制器有灵活的操作界面,丰富的软件功能可以调整运行参数,满足现场运行要求。系统完善的保护模块设计,保证了运行的安全性和可靠性,根据实验结果,电梯运行过程能跟随设计曲线,既能使门启闭迅速又能避免在起端和终端发生冲撞。
[1]王晓明,王玲.电动机的DSP控制—TI公司DSP应用[M].北京:北京航空航天大学出版社,2004.
[2]Texax Instruments Company. TMS320F2803x Piccolo System Control and Interrupts.[EB/OL]. www.ti.com, December 2009.
[3]Texax Instruments Company. TMS320x2802x,2803x Piccolo Enhanced Pulse Width Modulator (ePWM) Module UG[EB/OL].www.ti.com, March 2011.
[4]蔡林.基于PMSM的电梯门机控制系统设计[D].武汉:华中科技大学,2012.
[5]刘和平,刘平,王华斌,等.数字信号控制器原理及应用[M].北京:北京航空航天大学出版社,2011.
猜你喜欢
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
中国特种设备安全(2019年3期)2019-04-22
中国特种设备安全(2019年1期)2019-03-13
中国特种设备安全(2018年11期)2019-01-08
能源(2016年2期)2016-12-01
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28