
非线性PID控制技术在飞艇上的应用
2014-07-13 06:44张守旭严卫生
电子设计工程 2014年7期
张守旭,严卫生,谢 兰,陶 模
(西北工业大学 航海学院,陕西 西安 710072)
非线性PID控制技术在飞艇上的应用
张守旭,严卫生,谢 兰,陶 模
(西北工业大学 航海学院,陕西 西安 710072)
基于飞艇在自主飞行控制系统的开发,本文在对飞艇进行建模的基础上,考虑其附加质量、推力矢量等因素影响,建立了完整的六自由度数学模型。对六自由度模型利用小扰动法进行了线性化,得到了飞艇的状态方程,并将其分为纵向和侧向两组,采用先进PID控制器设计飞艇俯仰和偏航两种姿态的控制律。
平流层飞艇;六自由度方程;线性化模型;先进PID控制器设计
PID 控制是最早发展起来的控制策略之一,然而实际工业生产过程往往具有非线性、时变不确定性,难以建立精确的数学模型,常规PID 控制器参数往往整定不良,对运行工况的适应性很差。随着计算机技术和智能控制理论的发展,为复杂动态不确定系统的控制提供了新的途径。本文采用非线性PID控制原理,从动力学和运动学两个方面分析飞艇的力学特性,建立飞艇的六自由度数学模型。利用小扰动的方法将非线性的数学模型线性化,根据线性化方程特点将飞艇运动分为横向运动方程和纵向运动方程。
1 设计原理
文中主要研究一种非线性PID控制器,其原理如下:
以位置式PID控制器为例,设U为输出控制量,e(t)为系统输出偏差,Y(t)为系统输出。

控制系统的响应曲线如图1,对于固定Kp、Ki、Kd参数的PID控制器而言。e(t)愈大,Up愈大,控制作用愈强,有利于系统快速过渡,但是在图中的A、C、E 3点附近,过大的Up是不合适的,因为这将可能增加系统的超调。Ui为积分项,它累积了过去的误差信息,有利于系统减小稳态误差,但是在AB和CD段,此时系统已出现超调,Up符号已反向,起抑制超调的作用,然而Ui由于积分累积作用,在超调开始的一段时间,Ui并未改变符号,从而抵消了部分Up的抑制超调的作用,这对系统过程是不利的,Ud在OA段和BC段与Up的符号相反,也抵消了部分Up的抑制超调的作用,对系统过程也是不利的,但在AB段和CD段,Ud与Up同号,共同起抑制超调的作用,对系统过程是有利的。
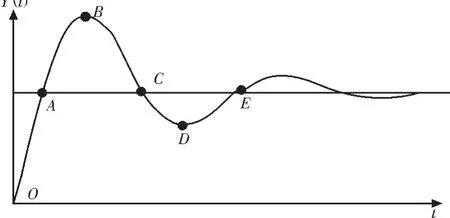
图1 常规系统响应Fig. 1 Conventional system response
综上所述,为进一步提高PID控制器的性能,要求:
1)Kp应在O点、B点和D点附近较大,而在A点、C点和E点附近较小;
2)Ki应在O点、B点和D点附近较小,而在A点、C点和E点附近较大;
3)Kd应在OA段、BC段和DE段较小,而在AB段和CD段较大;
这样,通过系统的输出状态来调节PID的参数比固定参数的调节器的性能更好

系统结构如图2,其中,NL PID为自己封装的一个非线性PID控制器模块,其输入输出关系满足上式(3)。

图2 非线性PIDFig. 2 Nonlinear PID
2 系统实现方案
已经对飞艇上所受的力与力矩进行了分析,在此基础上,我们利用动量及动量矩定理建立飞艇的动力学方程,通过查阅文献[3]直接得到飞艇的6个动力学方程。
为了更全面地描述飞艇的运动,还需建立飞艇的运动学方程


在理想运动状态对飞艇进行线性化,扰动运动小偏离理想运动状态的情况下将那些高阶小项作为小量略去,从而对系统的动力学模型进行降阶处理使之变成线性方程,得到线性化状态方程;
选取状态变量[ν,α,β,ωx,ωy,ωz,γ,ψ,θ,x,y,z]T控制变量[δγ,δε,δτ]T式中:(V—飞艇速度;γ—滚转角;α—速度迎角;ψ—偏航角;β—侧滑角;θ—俯仰角;ωx—滚转角速率;x—航程;ωy—偏航角速率;y—高度;ωz—俯仰角速率;Z—侧偏;δε—飞艇升降舵转角;δτ—推力(油门))
通过对整体状态方程分解,可将其分为纵向与横向状态方程,分别为:
纵向: 状态变量 [ν,α,ωz,θ,y]T控制变量 [δε,δτ]T
横侧向: 状态变量 [β,ωx,ωγ,γ,ψ]T控制变量 [δγ]T
3 非线性PID控制
飞艇的基本回路层的控制可以分为纵向控制和横侧向控制。其中纵向的控制包括俯仰角θ控制和航速控制,横向控制为航向(偏航角ψ)控制。
1)纵向控制
假设飞艇是匀速直线飞行的,这时候发动机转速不变,只考虑升降舵对飞艇俯仰运动的影响,俯仰角控制主要实现将俯仰角保持在驾驶员设定的俯仰角数值上,或跟踪外回路(制导回路)的俯仰角指令。
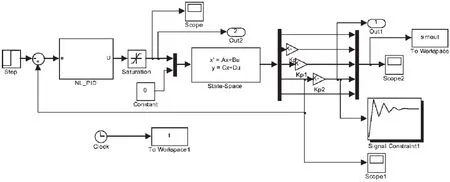
图3 纵向控制Fig. 3 Longitudinal control
2)横侧向控制
飞艇在水平匀速飞行过程中的偏航姿态控制过程如下:给定一个设定的偏航角Δφ-φ0,设φ0>0,传感器测量得到的飞艇实际偏航φ者相减得到误差信号Δφ=φ-φ0,经过偏航姿态控制器的运算,得到相应的方向舵偏转。该控制量输出驱使飞艇升降舵面偏转一个相应的角度Δθγ,从而调节偏航角达到给定值,系统达到平衡。
4 仿真结果分析
1)纵向控制非线性PID仿真结果
可看出非线性PID控制器可使系统调节时间基本不变,大幅度减小系统的超调量,性能指标优于普通PID控制器,较常规PID控制相比大大提高了控制速度和精度,控制作用明显。
2)横侧向控制
可看出非线性PID控制器使系统调节时间大幅度减小,提高系统的快速性,对于要求快速响应的控制系统来讲,性能指标优于普通PID控制器, 较常规PID控制相比大大提高了控制速度和精度,控制作用十分明显。

图4 横侧向控制Fig. 4 Lateral control

图5 常规PID控制仿真结果Fig. 5 Conventional PID control simulation results

图6 非线性PID仿真结果Fig. 6 Nonlinear PID simulation results
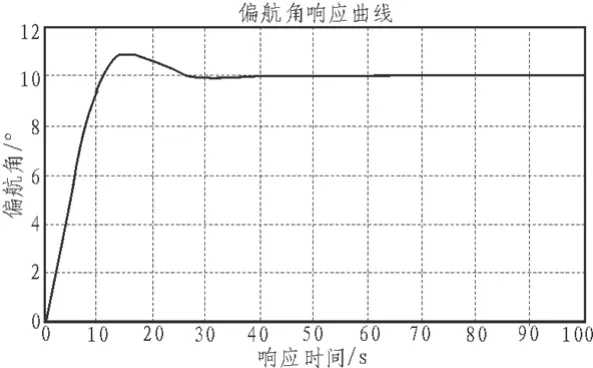
图7 常规PID控制仿真结果Fig. 7 Conventional PID control simulation results
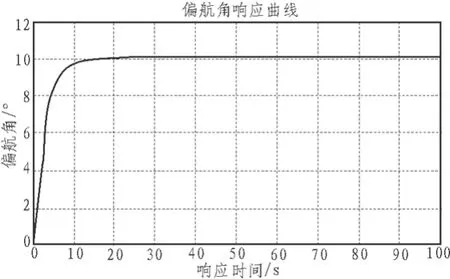
图8 非线性PID仿真结果图Fig. 8 Nonlinear PID simulation results
5 结 论
文中采用非线性PID控制原理,从动力学和运动学两个方面建立飞艇的六自由度数学模型。利用小扰动的方法将非线性的数学模型线性化,根据线性化方程特点将飞艇运动分为横向运动方程和纵向运动方程。采用先进PID控制器设计飞艇俯仰和偏航两种姿态的控制律,并对这种方法进行分析比较,对于飞艇控制取得了很好的控制效果,具有研究价值。
[1]肖顺达,飞行自动控制系统[M].北京:国防工业出版社,1982.
[2]刘金馄.先进PID控制MATLAB仿真[M].2版,北京:电子工业出版社,2004.
[3]cA.库利,J.D吉勒特.飞艇技术[M].北京:科学出版社.2007.
[4]Papageorgiou G,Glover K,D'Mello G,et al.Taking robust LPV control into flight on the VAAC Harrier[C]//Decision and Control,2000. Proceedings of the 39th IEEE Conference on.IEEE,2000(5):4558-4564.
[5]Caneron A.Intelligent knowledge—.based system foradaptive PID controller tuning[J].Automation,1986(27):133-138.
[6]Gomes S B V,Ramos Jr J G.Airship dynamic modeling for autonomous operation[C]//Robotics and Automation, 1998.Proceedings. 1998 IEEE International Conference on.IEEE,1998(4): 3462-3467.
Nonlinear PID control technology applied to the airship
ZHANG Shou-xu, YAN Wei-sheng, XIE Lan, TAO Mo
(School of Marine Science and Technology,Northwestern Polytechnical University,Xi'an710072,China)
Based on airships in the development of autonomous flight control system, this paper based on the modeling of the airship, considering the added mass, thrust vectoring and other factors, the establishment of a full six-degree-offreedom mathematical model. Control of six degrees of freedom model using small perturbation method linear equation of state of the airship, and is divided into longitudinal and lateral two groups, using advanced PID controller design airship pitch and yaw two stances law.
stratospheric airships; six degree of freedom equation; linear model; advanced PID controller
TN06
A
1674-6236(2014)07-0064-03
2013-04-09稿件编号201304123
张守旭(1989—),男,河南长垣人,硕士研究生。研究方向:武器系统与运用工程。
猜你喜欢
煤气与热力(2021年6期)2021-07-28
中等数学(2020年2期)2020-08-24
四川文理学院学报(2020年5期)2020-02-12
测控技术(2018年9期)2018-11-25
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
太空探索(2016年12期)2016-07-18
华东理工大学学报(自然科学版)(2015年3期)2015-11-07
百科探秘·航空航天(2015年12期)2015-11-07
