对相控阵雷达工作模式的资源调度研究*
2014-07-11 01:23:46冀琛潘谊春郁春来霍壮
现代防御技术 2014年3期
冀琛,潘谊春,郁春来,霍壮
(1.空军预警学院 a.研究生管理大队; b.五系,湖北 武汉 430019;2.中国人民解放军93046部队,辽宁 沈阳 110000)
0 引言
相控阵雷达是一种以电子扫描代替机械扫描的先进目标探测与定位设备,由于采用计算机控制,因而具有灵活的多波束指向及驻留时间、可控的空间功率分配及时间资源分配等特点[1-2],这些特点决定了相控阵雷达能快速提供大空域、多批量目标的三坐标测量数据,同时,可自适应地改变雷达的有关工作参数和工作模式以适应外界变化的工作环境[3-4]。
从电子侦察的角度,要实现对相控阵雷达工作模式的研究,就必须掌握相控阵是如何使雷达资源与整个任务事件相匹配,以充分发挥其性能,即是如何对各类资源进行分配管理的。本文从相控阵雷达的工作模式出发,研究了相控阵雷达的资源调度模型与算法,并对不同工作模式的资源调度问题进行了分析。
1 相控阵雷达的工作模式
相控阵雷达的特点,是相控阵雷达的工作模式与常规雷达的工作模式存在着区别,即机械扫描雷达在设计定型后,其工作模式和使命任务相应固化,实际工作中,按照时间顺序完成作战任务,功能相对单一[5-6]。而相控阵体制雷达则是“事件驱动”决定工作模式的使用,将担负的任务划分为6类雷达事件,并规定其驱动优先级,根据不同雷达事件,按照资源最优化配置原则,在资源数据库中调取工作模式完成雷达事件,实现多种雷达功能[7]。
雷达事件是指雷达对不同属性的目标对象所采取的相应动作及动作状态,包括搜索、跟踪及确认检验等,表1为6类雷达事件静态优先级规定表。
本文主要以预警雷达为研究对象,对其所具有的搜索、粗跟和精跟3种工作模式进行分析研究。
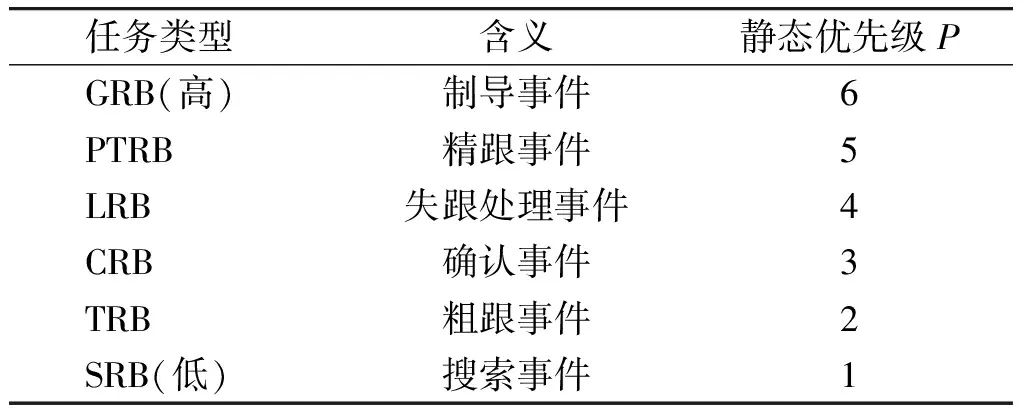
表1 6类雷达事件静态优先级表Table 1 Static priority of six radar events
2 相控阵雷达的资源调度
相控阵雷达能够同时工作于多种模式,这就要求相控阵雷达具备先进的调度模型以合理安排雷达的时间和能量资源[8],即传感器分配问题。传感器具有多种工作方式与工作参数,可以通过对传感器的分配,实现对不同工作参数的调用,以达到为各工作模式分配最优工作参数的目的。
相控阵雷达的资源调度,分为雷达任务优先级决策和调度决策2部分,如图1所示。前者决定完成多种雷达任务优先级的划分,它与雷达传感器组分配相关,不同传感器组对应不同的优先级,决定着雷达的工作模式;后者安排可执行的雷达任务,即对不同工作模式进行时间与能量的分配[9]。本文主要研究相控阵雷达对时间资源的调度问题。
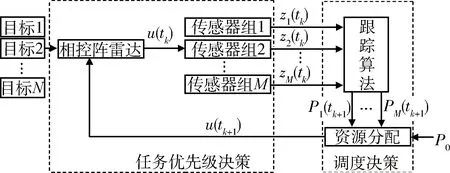
图1 相控阵雷达的资源调度功能框图Fig.1 Functional block diagram of phased array radar’s resource scheduling
3 相控阵雷达资源调度算法
相控阵雷达通常采用基于协方差控制的策略来分配资源,其基本思想是对每个目标预先设定一个期望的跟踪精度,即期望协方差,然后控制传感器组,使实际协方差在某种度量及准则下逼近期望协方差,剩余的传感器资源可以用来维持对其他目标的跟踪或是搜索发现新的目标[10-11]。
假设监视区域内有N个目标,相控阵雷达的任务是在维持对这N个目标跟踪的同时,还要搜索发现新目标,即相控阵雷达在处于跟踪模式的同时还要执行搜索模式。
(1) 预测tk+1时刻N个目标的跟踪误差协方差阵[12]

{tk,Pitk},
(1)
对于第i个目标,该目标的离散化状态方程为
xitk+1=FiTkxitk+GiTkwitk,
(2)
式中:xitk∈Rn为tk时刻第i个目标的状态向量;witk∈Rr为系统白噪声向量,其协方差矩阵为Qitk;FiTk为tk时刻的状态转移矩阵;GiTk∈Rn×r为tk时刻的输入分布矩阵。
对第i个目标在tk+1时刻的采样间隔为
(3)
利用卡尔曼滤波方程预测tk+1时刻第i个目标的协方差阵为
(4)
(2) 计算tk+1时刻N个目标的滤波跟踪误差协方差阵
传感器组对于第i个目标的量测方程为
zitk=Hixitk+vitk,
(5)
式中:zi(tk)∈Rm为tk时刻传感器组对目标i的量测向量;vitk∈Rm为量测噪声,其协方差矩阵为Ritk;Hi(tk)∈Rm×n为观测矩阵。
噪声vi·和wi·相互之间统计独立,而且与初始状态xit0无关。
利用卡尔曼滤波方程计算tk+1时刻第i个目标的滤波协方差阵为
(6)

(3) 计算tk+1时刻N个目标的跟踪误差协方差
记tk时刻之前的传感器控制矢量为U(tk)={u(t)|u(t)=0,1,2,…,N;t=t1,t2,…,tk},在tk+1时刻,若对第j个目标进行跟踪,则其跟踪误差协方差矩阵更新为卡尔曼滤波后的协方差矩阵,其余目标的跟踪误差协方差矩阵则为卡尔曼滤波算法中的预测协方差矩阵,故tk+1时刻各个目标的跟踪误差协方差矩阵可表示为[10]

(7)
(4) 基于跟踪误差协方差控制工作模式的选择[13]
设相控阵雷达有工作模式集合D,第i个工作模式对应第i个传感器子集Di,Di包含的传感器数目记为Mi。基于协方差控制的工作模式选择问题,可以统一地描述为[10]

(8)
式中:Ptk+1为tk+1时刻实际协方差矩阵;Pdtk+1为tk+1时刻期望协方差矩阵;Dopttk+1为tk+1时刻的最优工作模式,它使用由矩阵度量f·构成的目标函数计算,矩阵度量f·的具体定义如下:
M-1度量:绝对值求迹
(9)
M-2度量:矩阵2-范数
fP1,P2=‖ΔP‖2=‖P1-P2‖2.
(10)
由上面分析可知,由式(7)可以得出所有目标在tk+1时刻的误差协方差矩阵,将其带入工作模式选择模型(8)中,就可以递推得出各个时刻的工作模式Doptt,进而代入式(3)便可得到每一种工作模式的时间分配情况。
4 仿真分析
假设某部预警相控阵雷达的监视区域内有2个目标,位置0代表正北方向,以向东方向运动为正,目标运动如图2所示。
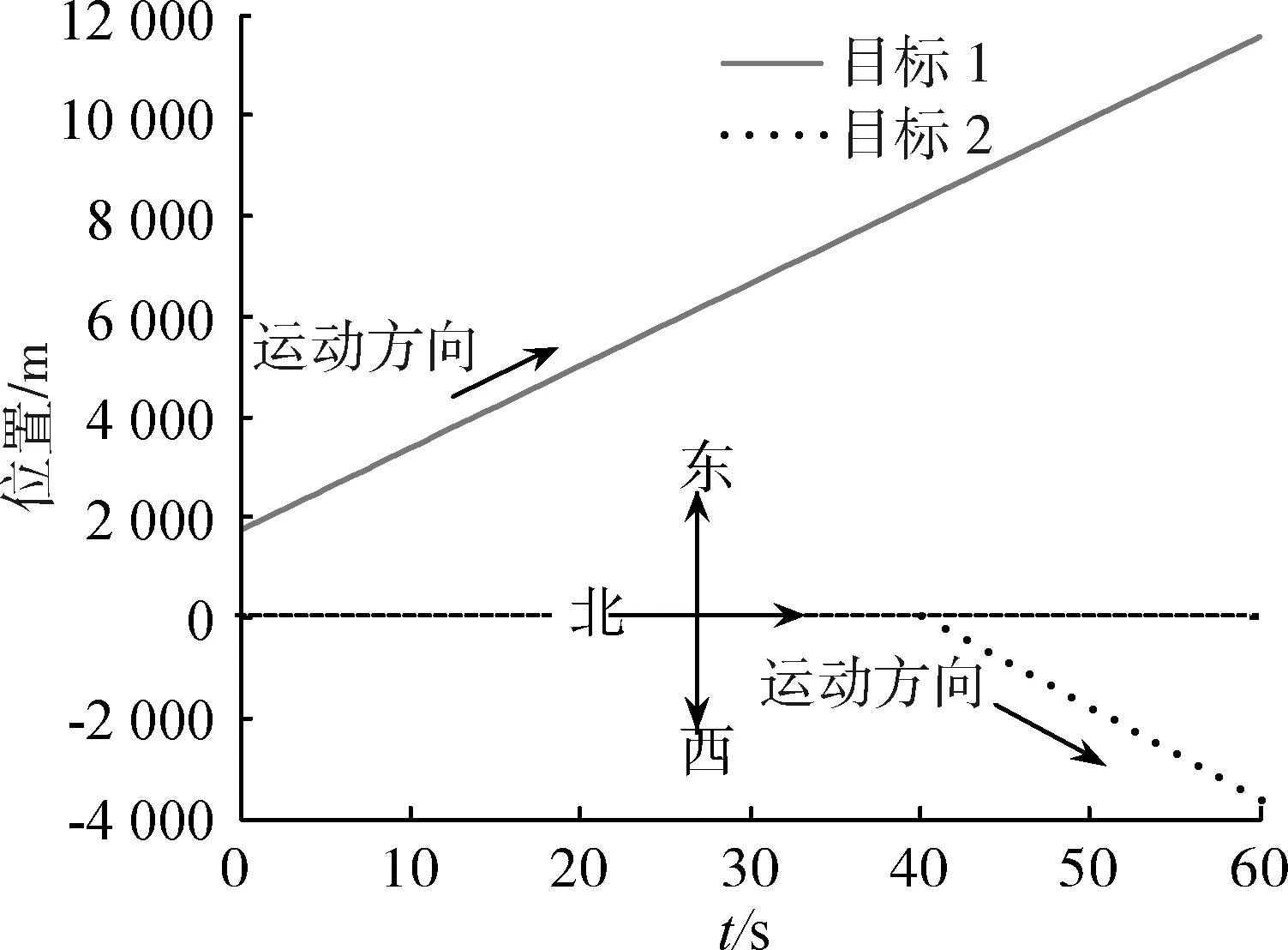
图2 监视区域目标的运动Fig.2 Motion of targets in monitor regions
在平面坐标系对目标运动进行分解,则目标位置可表示为在x轴和y轴上的坐标,运动速度可分解到x轴和y轴方向上。
目标2:目标2的起始位置为0 m,t2=20~60 s时,目标2从坐标0,0处以速度-120,-140m/s匀速运动,要求跟踪误差协方差P2=diag22.3,2.1,27.1,2.8,在x和y方向上的噪声标准差Q2分别为1和1.2 m/s2。
那么相控阵雷达对这2个目标进行资源调度情况,即对不同工作模式的选择以及资源分配情况,如图3,4所示。
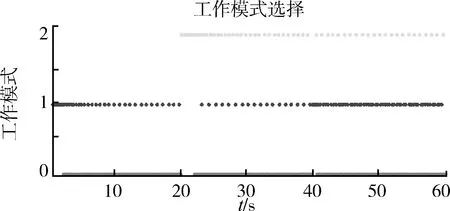
图3 不同工作模式的时间分配Fig.3 Time distribution of different operating modes
图3为相控阵雷达对3种工作模式的时间分配图,从图中可以看出,相控阵雷达在跟踪起始阶段的时间分配较为密集,当跟踪趋于稳定时,时间分配便变得稀疏;同时,由于相控阵雷达对目标1在跟踪至40 s时改变了跟踪精度,因此相控阵雷达的时间分配再次趋于密集,即完成了粗跟事件和精跟事件的转换。
图4是对不同工作模式的时间采样间隔T的分布图,幅度越高,时间间隔越长。图4a)为搜索模式的时间间隔分布图,可以看到搜索模式的时间分配较为稳定,只有在目标出现时时间分配有所降低,分布图出现峰值;图4b),4c)分别为工作模式1和2的时间间隔分布图,通过分析可以得到,工作于跟踪状态的时间间隔都是从发现新目标时先进行稳定的高数据率的跟踪,进而随着跟踪的稳定,时间间隔随之增加,而模式1在40 s后有一段时间间隔减小了,这是由于对目标1的跟踪精度发生变化的结果。通过以上分析,说明相控阵雷达对不同工作模式采用的时间间隔不同,又由于时间间隔是可测的,那么对相控阵雷达时间资源的掌控,将可实现对相控阵雷达工作模式的识别。
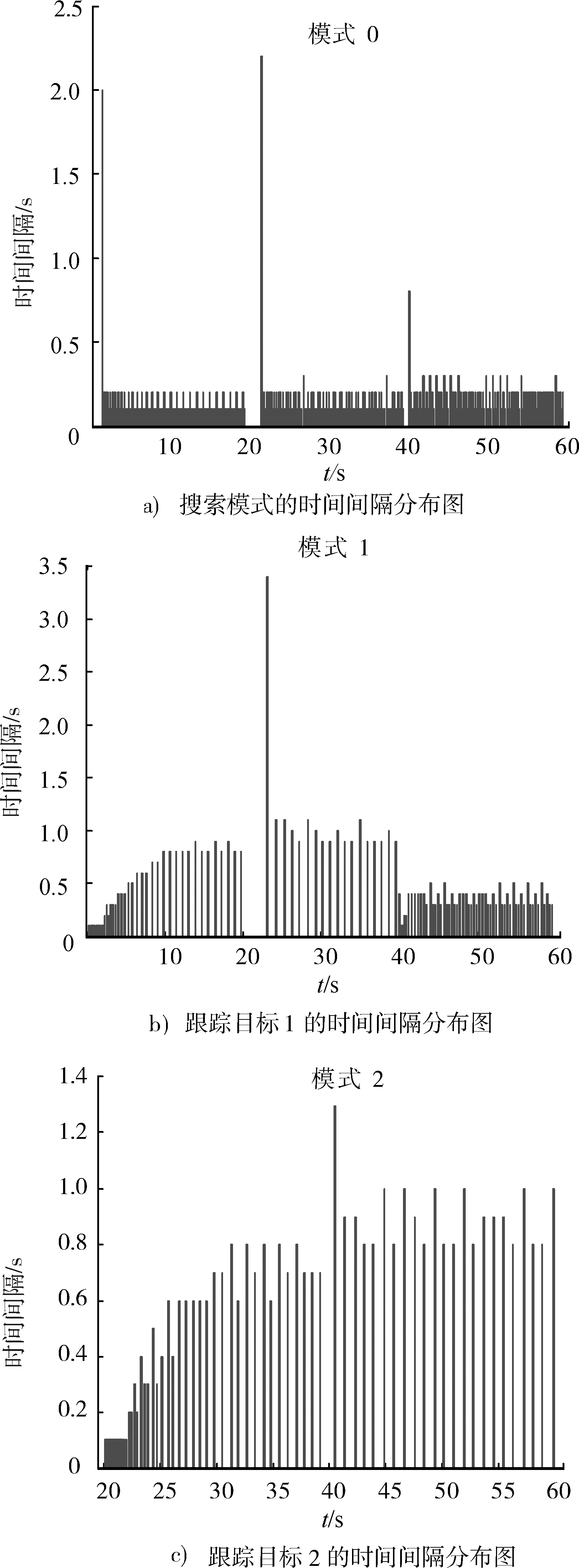
图4 不同工作模式的时间间隔分布Fig.4 Time interval profile of different operating modes
5 结束语
本文基于对相控阵雷达资源调度问题研究,针对相控阵雷达不同工作模式的选择与时间的分配进行研究,并通过对其中3种模式的定量分析,得到相控阵雷达对不同工作模式资源调度存在着差异,分析了对不同模式的资源分配的变化情况,为下一步对相控阵雷达工作模式的识别提供了支撑与指导。
参考文献:
[1] KEUK VAN G, BLACKMAN S S. On Phased-Array Radar Tracking and Parameter Control[J].IEEE Transactions on, Aerospace and Electronic Systems, 1993,29(1):186-194.
[2] 王凯,张绘. 岸基多功能相控阵雷达发展现状和发展方向[J]. 电子工程, 2011,7(4):31-34.
WANG Kai, ZHANG Hui. Development Demand and Direction of Shore-Based Multifunctional and Phased Array Radar [J]. Electronic Engineering, 2011,7(4):31-34.
[3] 刘华林,李海彬,王宗全. 相控阵雷达发展综述(四)[J]. 零八一科技, 2010,7(4):1-7.
LIU Hua-lin, LI Hai-bin, WANG Zong-quan. The Review of Phased-Array Radar Development [J].081 Technology,2011,7(4):31-34.
[4] 张光义. 相控阵雷达原理[M]. 北京:国防工业出版社, 2009.
ZHANG guang-yi. Principles of Phased Array Radar[M].Beijing: National Defense Industry Press, 2009.
[5] 罗敏. 多功能相控阵雷达发展现状及趋势[J]. 现代雷达, 2011, 33(9):14-18.
LUO Min. The Review of Phased-Array Radar Development [J]. Modern Radar,2011,33(9):14-18.
[6] 吕勇,郭凯. 机载有源相控阵雷达发展探析[J]. 信息通信, 2012,2(3):256-256.
LÜ Yong, GUO Kai. Airborne Active Phased-Array Radar Development Analysis[J]. Information & Communications,2012,2(3): 256-256.
[7] 秦亚萍,王建,张玉喜. 一种相控阵雷达自适应数据率目标跟踪算法[J]. 雷达与对抗, 2011, 31(1):28-31.
QIN Ya-ping, WANG Jian, ZHANG Yu-xi. An Adaptive Data Rate Target Tracking Algorithm of Phased-Array Radars[J]. Radar & Ecm, 2011, 31(1):28-31.
[8] 唐婷,何子述,程婷. 一种基于模板法的自适应雷达驻留调度算法[J].信号处理,2010,26(7):998-1002.
TANG Ting, HE Zi-shu,CHENG Ting. A Template-Based Adaptive Radar Dwell Scheduling Algorithm [J]. Signal Processing, 2010,26(7):998-1002.
[9] 周文辉. 相控阵雷达及组网跟踪系统资源管理技术研究[D].长沙:国防科学技术大学,2004.
ZHOU Wen-hui. Research on Resource Management Technology for Phased Array Radar and Its Network in Tracking System[D].Changsha: National University of Defense Technology, 2004.
[10] 卢建斌,胡卫东,郁文贤. 基于协方差控制的相控阵雷达资源管理算法[J].电子学报,2007,35(3):402-408.
LU Jian-bin,HU Wei-dong,YU Wen-xian. Resource Management Algorithm Based on Covariance Control for Phased Array Radars[J].Acta Electronica Sinica,2007,35(3): 402-408.
[11] 王壮,胡卫东,郁文贤,等. 相控阵雷达资源管理的理论与方法[M]. 北京:国防工业出版社, 2010.
WANG Zhuang,HU Wei-dong,YU Wen-xian,et al. Theoretical Method of Resource Management Algorithm Phased Array Radars[M].Beijing: National Defense Industry Press, 2010.
[12] 程婷. 相控阵雷达自适应资源管理技术研究[D].成都:电子科技大学,2008.
CHENG Ting. Research on Adaptive Resource Management Technologyfor Phased Array Radar[D].Cheng Du:University of Ekectronic Science and Technology of China,2008.
[13] 毛依娜. 相控阵雷达在跟踪摸式下的资源管理及任务调度研究[D].西安:西安电子科技大学,2011.
MAO Yi-na. Resource Management under Trackinh Mode and Task Scheduling for Phased Array Radar[D].Xi′an:University of Ekectronic Science and Technology of Xi′an,2011.
猜你喜欢
环球人物(2022年4期)2022-02-22 22:05:06
小资CHIC!ELEGANCE(2021年32期)2021-09-18 06:17:14
煤气与热力(2021年3期)2021-06-09 06:16:16
化工管理(2021年7期)2021-05-13 00:45:20
电子制作(2019年24期)2019-02-23 13:22:16
电子测试(2018年15期)2018-09-26 06:01:46
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
爆笑show(2015年4期)2015-06-24 01:55:12
小学阅读指南·高年级版(2014年2期)2014-05-27 05:29:32