并联有源滤波器的复合电流跟踪控制策略研究
2014-07-09 00:39王林川金媛媛
东北电力大学学报 2014年1期
王林川,金媛媛
(东北电力大学电气工程学院,吉林吉林132012)
随着电力电子技术不断发展,各种变频器、开关电源和电抗器不断应用于生活、生产中,这些电力电子器件使得电网的正常运行受到影响,妨碍了仪器仪表的正常工作,增加了电力元件的损耗。因此,有源滤波技术已经变得非常重要,而其中的关键技术,电流跟踪控制技术更是研究的热难点。目前,常用的电流跟踪控制方法主要有以下几种:瞬时值比较控制,单周控制,变结构控制,空间矢量PWM控制和智能控制等等[1]。
笔者在学习了各种控制方法的基础上,针对瞬时值比较控制动态响应速度快,补偿电流时,实时跟踪性能好但属于有差控制,存在不能消除系统的静态误差的局限性;针对模糊自适应递推积分PI控制虽然可以实现无差拍控制,但在误差较大时,系统需要较长时间达到稳定状态,有响应速度慢这样一个缺点,提出了一种新型控制方法,该方法综合了上述两种方法的优点,提高了有源电力滤波器的稳态性的同时也保证了系统的动态性能。
1 APF的模型
本文研究的APF为三相并联型[2],其模型如图1所示。
2 复合控制算法研究分析
2.1 瞬时值比较控制
瞬时值比较控制又叫滞环控制,它虽然具有控制简单,电流响应很快,不需要载波等优点,但是它是有差控制,对于精度要求较高的控制系统不能满足要求[3],其原理框图见图2。
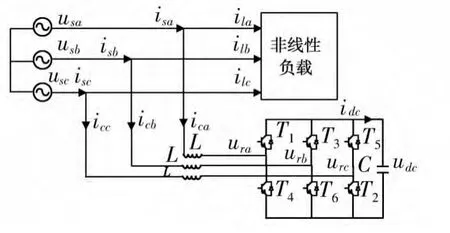
图1 APF模型
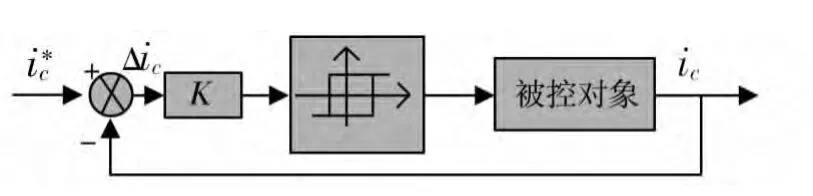
图2 瞬时值比较控制原理图
2.2 模糊递推积分PI控制
传统的PI控制器包含比例和积分环节,对于直流量和变化缓慢的变量可以较好的做到无差控制,但是不适合用在周期变化的变量上。递推积分PI控制克服了上面的不足,但是对于控制器参数Kp,Ki的整定依旧比较困难,它们一经确定下来,便无法在控制过程中实现实时修改。为了解决该问题,笔者将模糊控制与递推积分PI控制并联在一起复合运行,实现了Kp,Ki的在线实时修改。模糊递推积分PI控制的原理框图如图3所示。
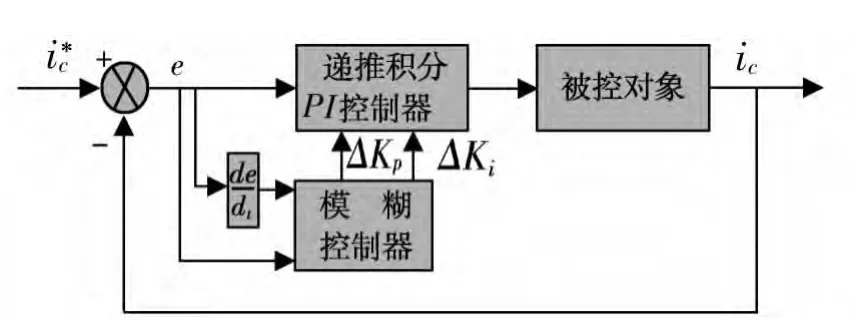
图3 模糊自修改递推积分PI控制原理图
指令电流ic*与APF产生的实际补偿电流ic之差e以及它的变化率de/dt经过模糊控制器将它们模糊后,然后按照模糊规律进行推算,再将推算得到的模糊值还原成确定值,最后得到实时修改变量ΔKp,ΔKi,将他们与递推积分控制中的参数Kp,Ki相叠加得到整定后的系统参数K'p,K'i。K'p变大,系统的响应速度会变快,静态误差会变小,但是当K'p很大时,虽然系统的响应速度很快,稳态误差也很小,但是系统会超调,失去稳定性;而K'p过小时,虽然超调量较小,也会引起系统响应过慢,静态误差过大这些问题。K'i变大,系统的稳态误差会变小,而当K'i过大时虽然能做到无差控制,然而系统会失稳,当K'i过小时系统的稳态误差会很大,不能满足控制精度上的要求。因此,参数K'p,K'i的选择非常重要[4]。
针对以上情况,笔者将上面这两种方法结合在一起,取长补短,提出了一种复合控制的方法[5]。
2.3 复合控制
其原理框图如图4所示。
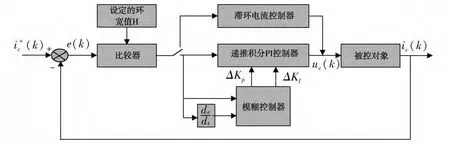
图4 复合控制原理框图
ic*和ic相减得到的误差信号经比较器处理,当发现误差信号的绝对值 e(k)大于H值时,滞环电流控制器投入工作,迅速减小误差,当误差减小到 e(k)小于H值时,模糊递推积分PI控制器开始作用于误差信号,消除系统的稳态误差。其控制规则也可用如下的式子表示出来:

上式中,0,1为滞环电流控制的输出量,uF-PI(k)为模糊递推积分PI控制的输出量,H为比较器的输入环宽值,该值的大小设置非常关键,它直接关系到哪个控制器投入使用。因为递推积分PI控制器,模糊控制器一经设计好,该控制比较器相应的最优环宽值也就确定下来了。若H值设置得过大,假如大于最大误差信号,则滞环电流控制器就根本起不到作用,只有模糊递推积分PI控制器在单独工作着,系统需要较长时间以后才达到稳定,响应性能非常差;若H值设置的过于小时,则主电路开关器件通断频繁,损耗很大并且原本也属于模糊递推积分PI控制范围的误差现在通过滞环比较器进行控制,不能做到无差控制。笔者结合APF的实际结构,顾及系统控制精度和响应速度两方面要求,经多次仿真实验,得出0.68Δic为最合适的环宽值,即0.68倍最大误差信号;并对两个控制器进行了设计。
2.3.1 模糊控制器的设计
(1)将输入的确定值变成模糊值。将仍是确定值的输入量e,de/dt和输出量ΔKpΔKi均设定为一个具有 NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)七个模糊子集的模糊集合,隶属函数采用具有高灵敏度的三角函数,然后设置相应的模糊论域,基本论域。
(2)模糊推理。输入量e,de/dt经模糊后,按照Mamdani模糊参数控制规律作出模糊决策。本文采用表1,表2所示的模糊规律。
(3)反模糊化。将模糊输出量通过重心法进行去模糊还原,最后得到ΔKp和ΔKi[6]。
2.3.2 递推积分PI控制器的设计
递推积分PI控制是基于传统的PI控制,在每个周期的N个采样点处分别对电流的跟踪误差信号进行采样积分。其增量式子为:

u(k)为k时刻控制器的输出量,e(k)为k时刻的跟踪误差,c为对k/N取整的整数值。
递推积分PI控制器按如下两个过程来设计:
(1)递推积分PI控制参数的预设定:本文采用Ziegler-Nichols法来得到Kp,Ki。
(2)Kp,Ki参数的修改:将经模糊控制得到的修改量ΔKp,ΔKi与上一步设定的Kp,Ki相叠加,得到修正后参数 K'p,K'i,即 K'p=Kp+ ΔKp,K'i=Ki+ ΔKi。
经模糊自修改递推积分PI控制后,得到最终控制规律表达为:

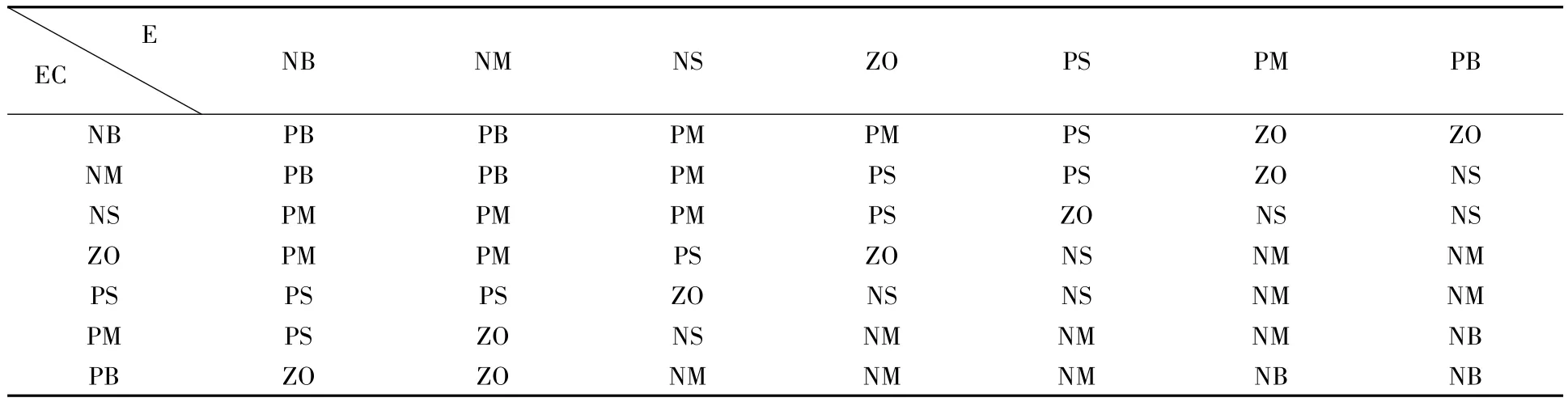
表1 参数ΔKp模糊控制规则
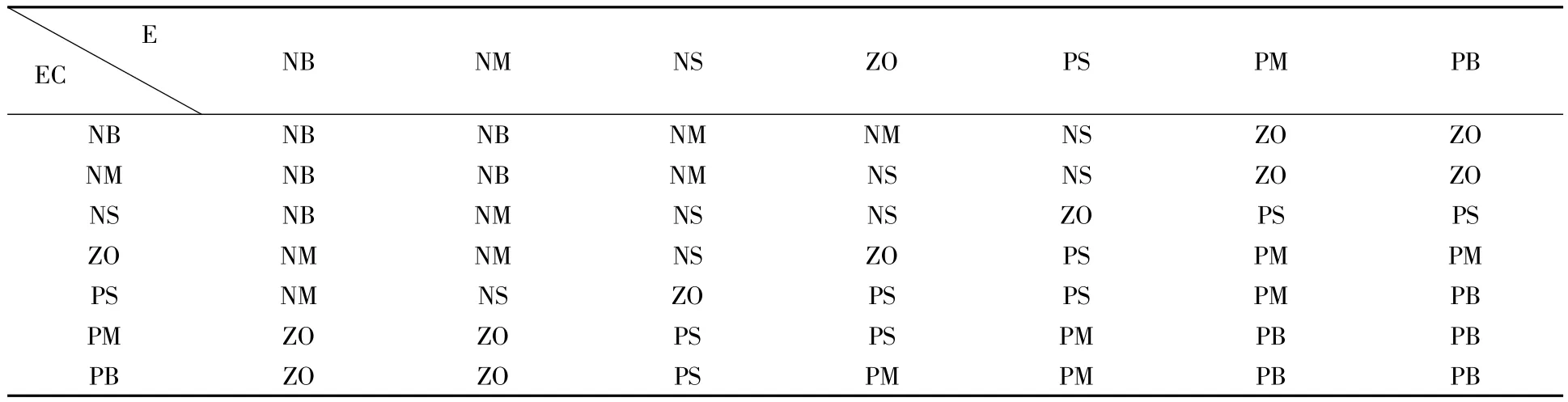
表2 参数ΔKi模糊控制规则
3 仿真验证分析
为了验证上述控制算法,笔者利用Matlab/Simulink搭建仿真模型,系统参数设置如下:电源电压有效值为220 V,频率为50 Hz,三相不控带R型负载,R为100 Ω,直流侧电压Udc为700 V,电容为1 100 F,主电路出口电感为10 mH,设定的环宽值H设为0.68倍最大误差信号,预整定参数Kp设为0.6,Ki设为0.01,Matlab/Fuzzy工具箱中的FIS编辑器的两个输入变量,输出变量的模糊域均设为[-6,6],比例因子设为6/5和3/2,量化因子设为1/2和5/6,输入变量e的基本论域设为[-5,5],de/dt的基本论域设为[-4,4],输出变量 ΔKp的基本论域为[-3,3],ΔKi的基本论域设为[-5,5],输入变量,输出变量设为含有NB,NM,NS,ZO,PS,PM,PB七个语言变量的模糊集合,隶属函数采用三角函数,推理规则采用Mamdani法,采用重心反模糊法,仿真时间设为0.2 s,采用Variable-Step仿真得到如下仿真结果。
上图中,图5为未投入APF之前的电网电流,从该图中可看出电网严重畸变。图6,7,8为投入APF后分别采用复合控制,瞬时值比较控制,模糊递推积分PI控制的仿真结果,其中的(a)均表示电网电流,(b)均表示指令电流信号与实际补偿电流信号之间的误差,从各(a)图中可看出,经过以上三种控制后,电流波形均得到明显的改善,但有一定的差别。笔者从响应速度,控制精度两方面来对以上三种控制方法做比较分析。
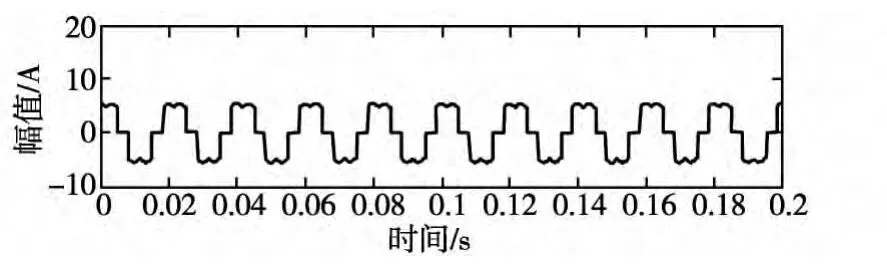
图5 投入APF前电网电流
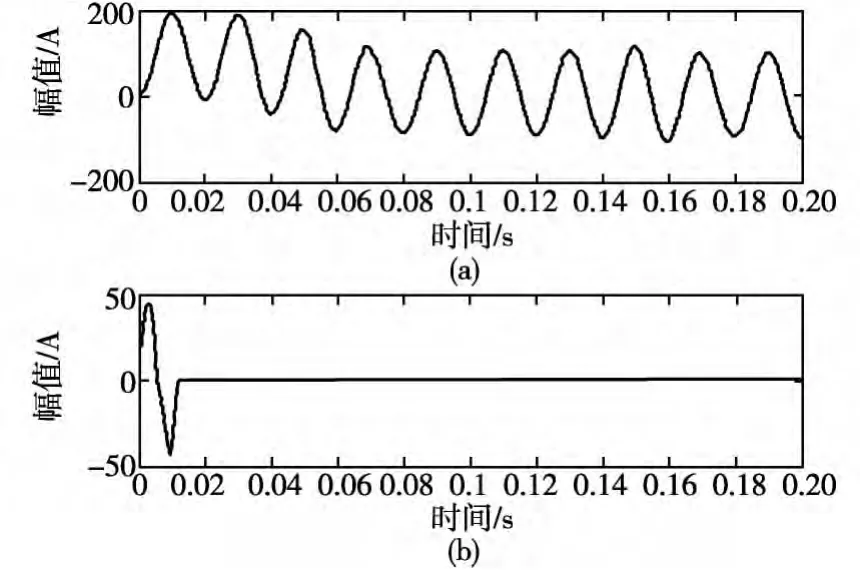
图6 复合控制仿真结果
比较以上各(b)图,会发现采用复合控制和瞬时值比较控制的系统,响应速度较快,其系统误差在0.01 s及以后几乎稳定不变,而采用模糊递推积分PI控制的系统误差要在0.015 s及以后才能稳定下来。
比较以上各(a)图,可看出采用复合控制和模糊递推积分PI控制的系统,其控制精度较高,几乎为标准正弦波,而采用瞬时值比较控制的电网电流具有较大的“毛刺”,它们含有较多的谐波。
根据以上分析,该复合控制方法集模糊递推积分PI控制与瞬时值比较控制的优点于一身,不仅动态响应速度较快而且稳态控制精度较高。
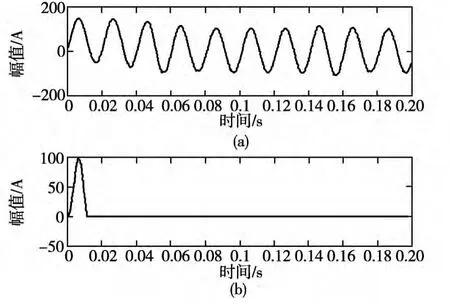
图7 瞬时值比较仿真结果
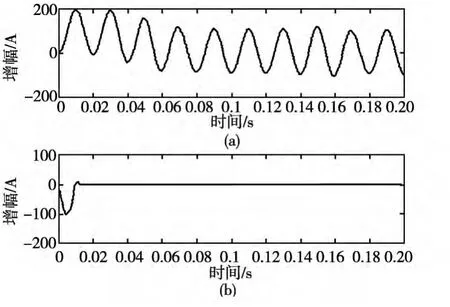
图8 模糊递推积分PI控制仿真结果
4 结 语
本文针对滞环电流控制和模糊递推积分PI控制各自的优缺点,扬长避短,提出了一种复合控制方法,经仿真实验证明,该复合控制不仅能提高APF系统的动态响应速度,还能提高其静态精度,理论分析和仿真实验均验证该复合控制方法是有效可行的[7]。
[1]卢秀和,徐铭.基于瞬时无功功率的高次谐波电流检测方法研究[J].电测与仪表,2010,47(2):9-12.
[2]吕敬,高宁,蔡旭.基于复合控制的并联型有源滤波器的仿真研究[J].高压电器,2012,48(3):81-85.
[3]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2005.
[4]郭丽娜,史祥翠,邵亚娟.基于模糊自适应PI控制的有源电力滤波器[J].自动化与仪器仪表,2011(3):69-71.
[5]伍海军,申群太.一种并联有源电力滤波器的复合控制方法研究[J].变频器世界,2011:105-108.
[6]张国良,曾静,柯熙政等.模糊控制及MATLAB应用[M].西安:西安交通大学出版社,2002.
[7]吴任国.有源滤波器控制算法研究[J].控制技术,2011,31(6):32-27.
猜你喜欢
电子设计工程(2022年15期)2022-08-17
遥测遥控(2022年1期)2022-02-11
光通信研究(2020年2期)2020-06-15
科技创新与应用(2019年17期)2019-06-09
宇航计测技术(2018年3期)2018-09-08
物联网技术(2017年7期)2017-07-20
中国惯性技术学报(2017年1期)2017-06-09
纺织导报(2014年9期)2014-10-31
组合机床与自动化加工技术(2014年10期)2014-03-01
现代防御技术(2014年5期)2014-02-28