飞机均衡式自动驾驶仪控制规律设计及仿真
2014-07-07 15:34曲东才林志刚卢建华
海军航空大学学报 2014年1期
曲东才,林志刚,卢建华
(1.海军航空工程学院控制工程系,山东烟台264001;2.92840部队,山东胶南266405)
飞机均衡式自动驾驶仪控制规律设计及仿真
曲东才1,林志刚2,卢建华1
(1.海军航空工程学院控制工程系,山东烟台264001;2.92840部队,山东胶南266405)
飞机在干扰力矩或斜坡信号作用下,其比例式自动驾驶仪控制规律会产生控制静差,难以控制飞机按预定航迹准确飞行。为解决该问题,首先,简要分析均衡式自动驾驶仪基本工作原理;然后,建立了均衡式自动驾驶仪结构图,对其控制规律进行设计;最后,进行了大量仿真研究。仿真结果显示,所设计均衡式自动驾驶仪控制规律是良好的和有效的,与比例式自动驾驶仪控制规律相比,其控制系统的稳态性能得到有效改进。
稳态精度;舵回路;自动驾驶仪;均衡式反馈;控制规律
虽然比例式自动驾驶仪结构简单,控制规律调节方便,但其稳态精度不高,在干扰力矩作用下会产生俯仰角、高度等参数静差,进而不能准确实现预定飞行航迹[1-2]。为消除常值干扰力矩、斜坡控制信号作用下的静差,具有均衡式反馈舵回路的自动驾驶仪得到快速发展,以使飞机在进行自动着陆等要求较高的飞行阶段,在兼顾控制系统动态性能前提下,能提高其控制精度。因此,对均衡式自动驾驶仪控制规律进行深入研究是非常有实际意义的。
1 均衡式自动驾驶仪基本工作原理
均衡式自动驾驶仪所采用的舵回路种类是均衡式反馈舵回路。均衡式反馈主要由2种不同性质反馈构成:舵机硬反馈kδf(负反馈)+非周期环节kδf/(Tes+1)(Te较大的正反馈,一般2~3 s至10 s左右)。均衡式反馈舵回路结构图如图1所示[2-3]。
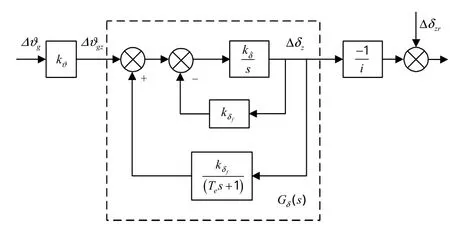
图1 均衡式反馈舵回路结构图Fig.1 Structure diagram of balanced feedback rudder loop
由均衡式反馈舵回路构成的均衡式自动驾驶仪基本工作原理分析如下:
在稳定与控制飞机角运动时,舵回路的动态过程通常在零点几秒时间内完成。此时,由于均衡式舵回路中的非周期环节通路还没有明显的反馈作用,因而可看成是断开的,故整个系统仍工作在硬反馈式驾驶仪的工作状态。当过程逐渐进入稳态后,该通路的正反馈量越来越大,最终正反馈量等于硬反馈通路的负反馈量。由于正、负反馈相互抵消,整个舵回路成为环节于是,在干扰与之间增添了一个积分环节,其作用是消除静差。
2 均衡式自动驾驶仪结构图建立及控制规律设计
2.1均衡式反馈舵回路传递函数
对图1的正、负反馈合并,可得衡式反馈舵回路的负反馈为

进而可推得,均衡式反馈舵回路的传递函数:

一般时间常数Tp值很小,可忽略,则均衡式反馈舵回路近似传递函数:

如何实现舵回路的均衡反馈,关键在于如何得到时间常数Te很大的非周期环节,这可通过电子线路,或采用带硬反馈的慢速随动系统来实现。
2.2 飞机均衡式控制系统结构图建立
基于均衡式反馈舵回路近似传递函数(3),以飞机纵向姿态控制系统为例,可建立均衡式反馈角位移控制系统如图2所示[2,4-7]。
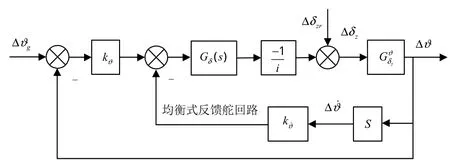
图2 飞机均衡式自动驾驶仪控制系统结构图Fig.2 Structure diagram of control system with balanced feedback automatic pilot
为分析方便,对飞机纵向姿态控制系统可作如下简化:
1)忽略长周期扰动运动,而仅考虑其短周期扰动运动;
2)因Te≫Td,飞机阻尼回路是阻尼短周期运动,故环节(Tes+1)/Tes在飞机短周期运动工作频段内可近似为1,并可从阻尼回路中移出。
基于以上分析,可将图2简化为图3所示的飞机均衡式控制系统结构图[2,8]。
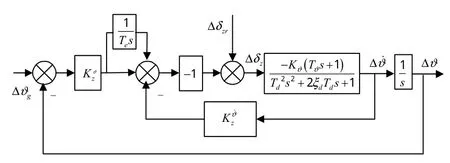
图3 简化的均衡式自动驾驶仪控制系统结构图Fig.3 Structure diagram of the simple control system with balanced feedback automatic pilot
图3中:1+(1/Tes)=(Tes+1)/Tes为飞机俯仰角Δϑ到舵偏角Δδz间的传动比;Kϑ为位置陀螺的传递系数为单位俯仰角速度ϑ˙所产生的舵偏角Δδz间的传动比;Kϑ˙为垂直角速率陀螺的传递系数。
2.3 飞机均衡式自动驾驶仪控制规律
基于图3,飞机均衡式自动驾驶仪控制规律设计:

对飞机均衡式自动驾驶仪控制规律分析[1-2,9]:
1)由式(5)可见,控制规律的组成信号中除比例式(硬反馈式)自动驾驶仪控制规律中与俯仰角差值(Δϑ-Δϑg)、微分信号Δϑ˙成比例的信号外,还引入了积分信号∫(Δϑ-Δϑg)dt。该积分信号的引入,对减小控制系统的稳态误差是非常必要的。
3)由图3可见,简化后的均衡式自动驾驶仪控制系统的正向通道出现2个积分环节,属于II型系统,对斜坡信号Δϑg的稳态误差为0。
3 仿真研究
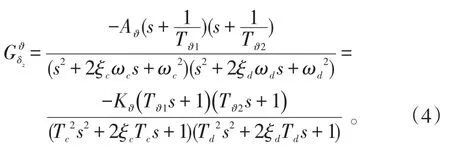
在某一飞行状态下,某型飞机的纵向短周期传递函数[9-12]:

在Matlab平台下,进行仿真研究。仿真步骤如下:
1)按阻尼飞机短周期运动的要求(如阻尼回路的阻尼比ξ=0.6~0.707),仿真选取内回路(阻尼回路)传动比,进而获取内回路传递函数(等效机体传递函数);
2)忽略Te,即按硬反馈式自动驾驶仪的设计要求(如系统稳态时间、稳态误差等),仿真选取外回路传动比
3)按减小或消除稳态误差时间要求,并结合其他动态指标要求,仿真取Te,并使(-1/Te)所确定的一个零点z与系统前向通路中的一个极点(1/s)基本抵消,即z=-1/Te≈1/s,使整个控制系统达到基本“均衡”;
4)对由被控对象和控制器所组成的整个系统进行仿真,检测其控制系统的性能是否达到要求,如稳态误差等指标不能达到要求,则重复步骤1)~3)。
仿真参数:舵回路时间常数为0.08 s,常值干扰力矩所产生的等效干扰舵偏角Δδzr=0.15°;仿真选取传动比=0.86、=1.62。
主要选取3种典型Te(Te=2 s,7 s,15 s)进行仿真研究,其仿真曲线如图4 a)~c)。为与比例式自动驾驶仪的控制性能进行对比分析,在相同下,也对比例式自动驾驶仪进行仿真,仿真曲线见图5。
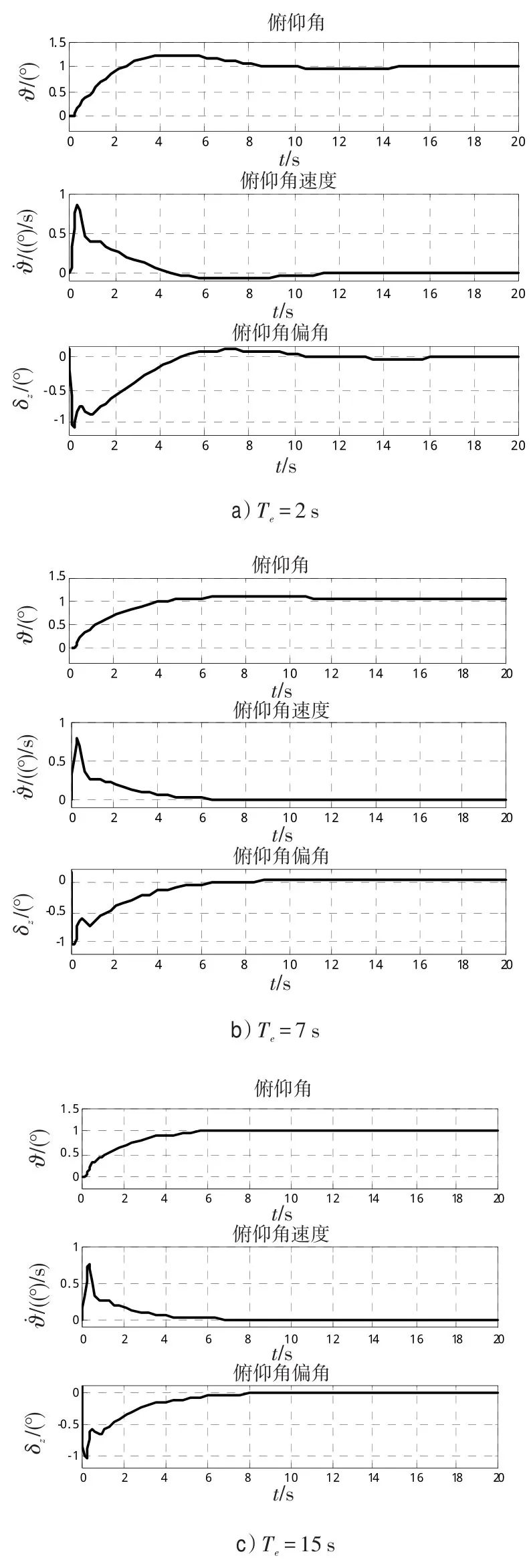
图4 均衡式自动驾驶仪仿真曲线Fig.4 Simulation curve of control system with balanced feedback automatic pilot
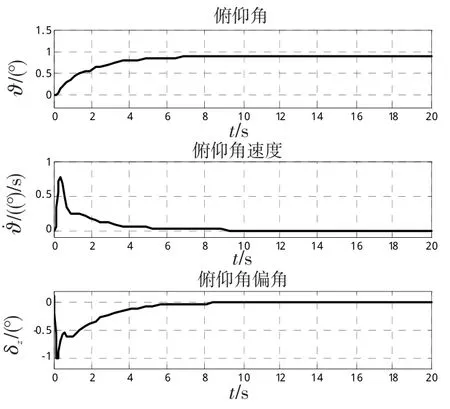
图5 比例式自动驾驶仪仿真曲线Fig.5 Simulation curve of control system with proportional automatic pilot
由仿真曲线可见:①与比例式自动驾驶仪相比,均衡式自动驾驶仪Δϑ的稳态精度得到提高;②Δϑ、Δϑ˙、Δδz均包含长、短2种典型运动模态,即第1阶段以快速变化为主要特性的动态过程(约前10 s,其特点与硬反馈式驾驶仪控制系统相似)和第2阶段以慢变为主要特征的稳态调整过程(在后10 s,稳态调整时间取决于Te);③随着Te的增大,均衡式自动驾驶仪Δϑ的稳态时间得到减小,其快速性得到提高。
4 结论
在简要分析均衡式自动驾驶仪基本工作原理上,建立了均衡式自动驾驶仪结构图,对其控制规律进行设计,并进行大量仿真。仿真显示,所设计均衡式自动驾驶仪控制规律是良好的和有效的,与比例式自动驾驶仪控制规律相比,其控制系统的稳态性能得到有效改进。由于z=-1/Te≈1/s,Te越大,由(-1/Te)所建立的零点z越接近坐标原点。虽然这可看作一对偶极子,但因已十分靠近坐标原点,故不能随意互相消去。
[1]文传源.现代飞行控制[M].北京:北京航空航天大学出版社,2004:143-196. WEN CHUANYUAN.Modern flight control[M].Beijing:Beihang University Press,2004:143-196.(in Chinese)
[2]张明廉.飞行控制系统[M].北京:国防工业出版社,1984:142-154. ZHANG MINGLIAN.Flight control system[M].Beijing:National Defense Industry Press,1984:142-154.(in Chinese)
[3]刘鹏,谷良贤.高超声速飞行器动态输出反馈最优跟踪控制[J].哈尔滨工业大学学报,2011,43(7):151-154. LIU PENG,GU LIAGNXIAN.Dynamic output feedback based optimal tracking for hypersonic flight vehicles[J]. Journal of Herbin Institute of Technology,2011,43(7):151-154.(in Chinese)
[4]BRIAN L S,FRANK L L.Aircraft control and simulation [M].Hoboken,New Jersey:John Wiley&Sons.Inc.,1992:109-114.
[5]CHRISTOPHER FIELDING,et al.Advanced techniques for clearance of flight control laws[M].Germany:Sprinter,2002:180-205.
[6]苏希尔·古普塔.控制系统基础[M].北京:机械工业出版社,2004:248-291. SUDHIR GUPTA.Elements of control systems[M].Beijing:China Machine Press,2004:248-291.(in Chinese)
[7]CHRISTOPHER FIELDING,et al.Advanced techniques for clearance of flight control laws[M].New York:Springer,2002:180-205.
[8]王美仙,李明,张子军.飞行器控制律设计方法发展综述[J].飞行力学,2007,25(2):1-5. WANG MEIXIAN,LI MING,ZHANG ZIJUN.Introduction to the development of aircraft control law designed method[J].Flight Mechanics,2007,25(2):1-5.(in Chinese)
[9]程继红,曲东才.某型飞机角位移自动驾驶仪比例式控制规律设计与仿真[J].海军航空工程学院学报,2011,26(3):241-245. CHENG JIHONG,QU DONGCAI.Design and simu-lation of the proportional control law for aircraft angular displacement autopilot[J].Journal of Naval Aeronautical and Astronautical University,2011,26(3):241-245.(in Chinese)
[10]赵广元.Matlab与控制系统仿真实践[M].北京:北京航空航天大学出版社,2009:199-203. ZHAO GUANGYUAN.Emulation study of Matlab and control system[M].Beijing:Beihang University Press,2009:199-203.(in Chinese)
[11]QUISENBERRY J E,ARENA A S.Dynamic simulation of low altitude aerial tow system[C]//AIAAAtmospheric-Flight Mechanics Conference and Exhibit.2004:4809-4813.
[12]WILLIAMS P.Real-time computation of optimal trajectories for tethered satellite systems[C]//AAS/AIAA Astrodynamics Specialist Conference.2005:7-11.
Design and Simulation of Aero Control Law with Balanced-Autopilot
QU Dong-cai1,LIN Zhi-gang2,LU Jian-hua1
(1.Department of Control Engineering,NAAU,Yantai Shandong 264001,China; 2.The 92840thUnit of PLA,Jiaonan Shandong 266405,China)
The aero proportional control law of the automatic pilot would bring control stability error under interference moment or ramp signal,airplane then can't make airplane accurate fly along scheduled flight path.Firstly,basic work principle foundation of the balanced-automatic pilot was briefly analyzed.Secondly,structure diagram of balanced-automatic automatic pilot was established,and it's control law was designed.Finally,a great deal of simulation research was done. Simulation results manifested that the designed balanced-automatic pilot control law was good and valid,with comparison proportional control law of automatic pilot,and the steady state capabilities of the control system with balanced-automatic pilot were gotten valid improvement.
steady precision;rudder loop;autopilot;balanced feedback;control law
V249.122
A
1673-1522(2014)01-0001-04
10.7682/j.issn.1673-1522.2014.01.001
2013-09-24;
2013-11-20
国家自然科学基金资助项目(60774016)
曲东才(1964-),男,教授,博士。
猜你喜欢
浙江共产党员(2022年10期)2022-11-23
军民两用技术与产品(2021年8期)2021-11-24
兵器装备工程学报(2021年9期)2021-10-15
汽车零部件(2020年7期)2020-08-03
汽车实用技术(2019年9期)2019-05-15
汽车实用技术(2018年15期)2018-08-29
导航定位与授时(2016年1期)2016-03-16
湖南大学学报·自然科学版(2014年2期)2014-12-25
汽车科技(2014年6期)2014-03-11
航空知识(2001年5期)2001-06-12