
战术导弹末端攻角收敛优化设计方法
2021-10-15 01:51管茂桥崔晓曦王林平邹景锋
兵器装备工程学报 2021年9期
管茂桥,崔晓曦,王林平,贾 鑫,邹景锋
(中国兵器工业导航与控制技术研究所, 北京 100089)
导弹飞行和命中的全过程,攻角是一个很重要的物理量。导弹飞行过程中,通过对攻角的控制来实现弹体稳定和制导飞行;而导弹命中毁伤目标过程中,攻角也是很重要的一个限制量。为了确保侵彻战斗部有更好的毁伤效果,要求命中攻角尽量小。为了实现零攻角命中的要求,一些学者提出使用制导律让弹的攻角在末端自然归零[1-2]。但是,导弹飞行过程中的风干扰、加工误差、结构扰动、非线性环境、器件误差等干扰项,使得这些制导律很难真正达到末端攻角归零的效果。在工程上,末端使用攻角收敛控制回路实现攻角归零更为可靠。为了不影响制导精度,通常要求攻角收敛控制回路具有非常高的快速性,同时也应当有足够的稳定性,而这两者之间通常是矛盾的。因此收攻角控制回路的设计应当在快速性、准确性与稳定性之间平衡。
本文使用了人工智能的热门算法[3]之一——最速梯度下降优化方法[4]作为基本方法,分析了两种常见的攻角收敛驾驶仪——过载驾驶仪和姿态驾驶仪的理论原理、分别给出了优化设计方法、分析了稳定性与快速性、进行了仿真验证并且得出了设计结论。
1 模型建立
建立导弹的纵向平面角度、角速度、加速度的关系式[5]:
(1)
(2)
(3)
(4)
ϑ=θ+α
(5)
其中,α为攻角; ϑ为俯仰角;θ为弹道倾角;ωz为俯仰角速度;δz为俯仰舵偏角;V为导弹飞行速度;bα、bδz、aα、aωz、aδz等动力系数的定义见参考文献[6]。
对方程式(1)~式(5)进行拉氏变换,得到传递函数:
(6)
(7)

(8)
其中,ayb为纵向过载。
(10)
(11)
(12)
(13)
2 过载收攻角自动驾驶仪设计
2.1 原理框图
过载收攻角驾驶仪的结构框图[7]如图1。

图1 过载驾驶仪原理框图Fig.1 Schematic diagram of acceleration autopilot
对于正常式布局的导弹,舵机环节在设计阶段可以简化为一个系数[8]ks=-1。

2.2 内回路设计方法
对于图1,内回路通常称作阻尼回路,其作用是提高导弹的稳定性,外回路为过载回路,其作用是让过载在一定时间内收敛到0。
内回路设计方法为阻尼匹配设计,起增稳作用,设定期望的阻尼为μd,内回路传递函数为

(14)
对分析传递函数的分母,阻尼可以解为
(15)
这样,对于选定的期望阻尼μd,可以求出内回路的增益为
(16)

(17)
2.3 过载驾驶仪数值优化设计方法
驾驶仪的外回路参数Kacc采用数值优化设计方法得到。
将过载自动驾驶仪写为状态空间格式[11]:
(18)
设置初值:
α(t0)=α0;δz(t0)=0;ayb(t0)=V[bαα(t0)+bδz(t0)]
θ(t0)=0; ϑ(t0)=0;ωz(t0)=0
将自动驾驶仪的收敛准则设置为当时间time>tdesire后,攻角的绝对值收敛到一小量,即:|α|<αlimit。
选定待求量Kacc的初值,记为Kacc0.
接下来,使用龙格库塔数值积分方法对方程式(18)求解,可以得到满足|α|<αlimit(time>tc)的攻角收敛时间tc,记为:tc=facc(Kacc)[12],
对于制定的期望攻角收敛时间tdesire,求待定量Kacc的问题可以转化为一个标准的无约束优化问题,优化的目标是找到一个外回路增益Kacc,使得tc无限接近于tdesire
Kacc=optimal(facc(Kacc)-tdesire)
2.4 无约束优化问题求解
采用最速梯度下降法进行优化问题求解[13]。最速梯度下降法是一种较成熟的优化算法[14],步骤如下:
1) 选取初始点x0,给定终止误差ε>0,令k=0;
2) 计算当前梯度▽f(xk),若▽f(xk)≤ε,终止迭代,输出结果为xk,否则进行第三步;
3) 取pk=-▽f(xk);
4) 进行一维搜索,求tk,使得:
令xk+1=xk+tkpk,k=k+1,转步骤2)。
在本算例中,选择Kacc作为待求的x,初值为x0=0.5,ε=10-6,函数为目标函数f为2.3节中的目标函数Kacc=optimal(facc(Kacc)-tdesire)。
2.5 设计实现
表1为某导弹的动力学系数。

表1 典型动力学系数
将动力学系数代入方程式(6)到式(7),得到传递函数参数[15]如下:
(19)
首先设计内回路将期望闭环阻尼设置为0.9,使用方程式(16),计算得到内回路增益:Kg=0.161 3。
然后求解外回路增益Kacc,设置优化算法求解条件为:time>tdesire,(tdesire=0.1s)后,攻角|α|<αlimit,αlimit=0.6°,攻角初值为α0=5°。
通过2.4的优化算法求解流程,得到:Kacc=0.001 1。
基于前述参数,图2为过载收攻角自动驾驶仪的攻角优化仿真曲线。

图2 过载收攻角自动驾驶仪优化仿真曲线Fig.2 acceleration autopilot AOA convergence optimization result
3 姿态收攻角自动驾驶仪设计
姿态驾驶仪采用俯仰陀螺反馈的积分反馈形成外回路闭环,如图3所示,通过将俯仰角指令设置为当前的弹道倾角,也可以用来攻角[16]归零。

图3 俯仰收攻角自动驾驶仪(基础版)外回路闭环示意图Fig.3 structure of pitch AOA convergence autopilot(base version)
3.1 原理框图
俯仰姿态驾驶仪的指令ϑc设置为弹道倾角θ,这样,姿态驾驶仪的外回路闭环可以表示为如图4所示的形式。

图4 俯仰收攻角自动驾驶仪(推导版)外回路闭环示意图Fig.4 structure of pitch AOA convergence autopilot (derived version)
由于α=ϑ-θ,那么俯仰姿态驾驶仪的外回路闭环可以等效为如图5所示的攻角驾驶仪形式。
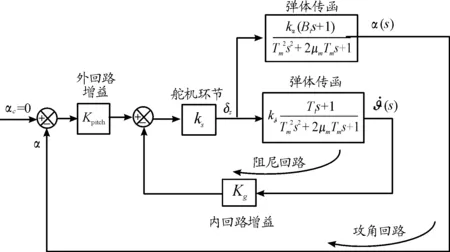
图5 俯仰收攻角驾驶仪(等效攻角驾驶仪版)外回路闭环示意图Fig.5 Structure of pitch AOA convergence autopilot(equivalent AOA autupilot version)
如图5所示,俯仰收攻角姿态驾驶仪可以等效为攻角指令为0的αc=0攻角驾驶仪。
俯仰姿态收攻角自动驾驶仪的内回路与过载收攻角姿态驾驶仪的内回路完全一致,其设计方法与2.2节中的内回路设计方法一致,使用式(16)计算阻尼回路增益。
3.2 俯仰姿态收攻角驾驶仪数值优化设计方法
与2.3节中过载驾驶仪状态空间形式类似,姿态收攻角自动驾驶仪可也写为如下的状态空间形式:
(20)
使用2.3中的方法,可也得到姿态收攻角自动驾驶仪的收敛时间tc与外回路增益Kpitch的关系:tc=fpitch(Kpitch).使用2.4中介绍的优化问题求解方法求解。
3.3 设计实现
针对2.5节中的相同弹体传函、初始条件、收敛准则,求解姿态驾驶仪的控制参数。
姿态收攻角驾驶仪的内回路与过载收攻角驾驶仪的内回路完全一致,可以使用相同的设计方法得到内回路阻尼配置为0.9时的阻尼回路参数为:Kg=0.161 3。
选择与2.5中过载收攻角驾驶仪相同的优化条件:time>tdesire,(tdesire=0.1 s)后,攻角|α|<αlimit,αlimit=0.6°。攻角初值为α0=5°
使用2.4节中的优化算法求解流程,得到:Kg=50.871 5。仿真曲线如图6所示。

图6 姿态收攻角自动驾驶仪优化仿真曲线Fig.6 Pitch autopilot AOA convergence optimization result
4 两种驾驶仪结构的稳定性对比
4.1 根轨迹分析
过载收攻角驾驶仪与姿态收攻角驾驶仪有相同的内回路,设计方法相同,可使用根轨迹方法对比两种驾驶仪框图的稳定性与快速性。
过载收攻角自动驾驶仪的开户传函可以写为:
其中:
姿态收攻角自动驾驶仪的开户传函可以写为
姿态收攻角自动驾驶仪的开环零点为


根据根轨迹的准则,可以近似得到2种驾驶仪构型的如图7所示[17]。

图7 根轨迹示意图Fig.7 Root locus diagram
根据根轨迹示意图,可以得到如下结论:
1) 为了达到相同的闭环阻尼μclose,姿态收攻角驾驶仪的闭环频率要远大于过载收攻角驾驶仪的闭环频率,这对舵机提出了更高的要求。
2) 为了达到相同的快速性,即选定相同的闭环频率ωclose,姿态收攻角驾驶仪的闭环阻尼要远大于过载收攻角自动驾驶仪的闭环阻尼。
3) 过载收攻角驾驶仪的快速性潜力小于姿态收攻角自动驾驶仪。
4.2 仿真与结论
为了验证根轨迹分析结果,分别在2.5和3.3节设计好的,具有相同快速性的过载收攻角驾驶仪和姿态收攻角驾驶仪中加入舵机环节,考核其闭环稳定性。
假设舵机环节传递函数为
图8、图9分别是Ts=0 s和Ts=0.01 s的2种驾驶仪优化仿真曲线。

图8 舵机时间常数Ts=0 s时的优化仿真曲线Fig.8 Simulation result of servo time constant Ts=0 s

图9 舵机时间常数Ts=0.01 s时的优化仿真曲线Fig.9 Simulation result of servo time constant Ts=0.01 s
从仿真曲线可以分析得到2种驾驶仪的优缺点,见表2。

表2 2种收攻角驾驶仪的优缺点
5 结论
过载驾驶仪和姿态驾驶仪是收攻角常用的2种驾驶仪结构,并从快速性和稳定性2个方面分析了它们的优缺点。应根据实际情况确定攻角收敛策略:当舵机性能较差时,可选择过载驾驶,保证攻角收敛过程中的弹道稳定;当系统对攻角收敛的快速性有高要求时,可选择姿态驾驶仪,以实现更短的攻角收敛时间。
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
军民两用技术与产品(2022年3期)2022-06-05
纺织服装周刊(2022年16期)2022-05-11
物流科技(2022年2期)2022-05-07
军民两用技术与产品(2021年6期)2021-10-14
宇航材料工艺(2020年6期)2021-01-28
航天工业管理(2020年9期)2020-12-28
汽车零部件(2018年8期)2018-09-06
能源研究与信息(2015年4期)2016-02-03
建筑工程技术与设计(2015年29期)2015-10-21
