
仿蜥蜴机器人脚掌流体力学仿真分析
2014-07-02 01:17高铁红顾佳朋张曜玮石凯
河北工业大学学报 2014年1期
高铁红,顾佳朋,张曜玮,石凯
(1.河北工业大学机械工程学院,天津 300130;2.石家庄信息工程职业学院电子信息群机电工程系,河北石家庄 050035)
仿蜥蜴机器人脚掌流体力学仿真分析
高铁红1,顾佳朋1,张曜玮2,石凯1
(1.河北工业大学机械工程学院,天津 300130;2.石家庄信息工程职业学院电子信息群机电工程系,河北石家庄 050035)
仿蜥蜴机器人是模拟蛇怪蜥蜴运动方式实现水面行走的机器人,其脚掌的运动特性决定了机器人能否实现水面行走.在对蜥蜴原型运动机理进行分析的基础上,构建机器人单腿驱动机构及脚掌模型,基于ADAMS软件分析机器人单腿驱动机构脚掌处入水速度特性,基于计算流体动力学分析软件的动网格技术,对机器人脚掌进行水环境下运动仿真分析与研究,结果表明机器人脚掌能够以设定速度拍击水面形成空气腔,并在空气腔破裂前抬出水面,得出机器人脚掌入水速度、运动时间和所受升力.该研究将对今后机器人样机制作、电机选型提供理论基础.
蛇怪蜥蜴;机器人脚掌;速度;动网格;空气腔
蛇怪蜥蜴无论是在流动的小溪,还是平静的湖面,它都能在其水面上行走.一只蛇怪蜥蜴小的不到2 g重,大的重量超过200g,但无论大小,它们都具有只用后腿在水上运动的能力.其水上行走速度可以达到1.5m/s,其每秒行走距离约为身长的10倍[1].
受蛇怪蜥蜴可以在水面上快速运动的启发,国内外学者对水上快速运动机器人进行了一系列分析与研究.卡内基梅隆大学梅汀·西蒂副教授的研制成果“水上奔跑者”,体积轻巧,能够在水面上快速行走[2].军械工程学院、中国科学院合肥物质科学研究院、上海大学等国内学者也对仿蜥蜴机器人进行研究[3-6].仿蜥蜴机器人是模拟蜥蜴运动方式实现水面行走的机器人,而机器人脚掌应以多大速度拍水才能形成空气腔,机器人脚掌在空气腔破裂前抬出水面所需要的时间为多少,机器人脚掌所受升力能否支撑机器人不会沉入水中,这些都是需要研究的问题.
本文利用ADAMS软件对机器人单腿驱动机构进行运动仿真分析,得出其脚掌处运动轨迹和速度曲线;通过计算流体力学动网格模型对机器人脚掌进行运动仿真分析,模拟机器人脚掌拍击、扑水和恢复3个运动阶段,得出机器人脚掌入水速度、运动时间和所受升力,为样机制作和电机选型提供理论基础.

图1 蜥蜴水面运动过程Fig.1 Themoving processof lizard
1 蜥蜴原型脚掌的研究与分析
如图1所示,蜥蜴在水面上跑的每一步分为:拍击,扑水和恢复.拍击阶段是指从脚接触水面开始,脚在水中主要是做向下的垂直运动;在扑水阶段,脚主要是向后运动,使水形成一个漩涡,然后过渡到恢复阶段;在恢复过程中,脚抬起并离开水面,这样完成了蜥蜴的一整步,腿则回到了下一个循环步的拍击阶段的开始位置.蜥蜴的脚掌向下拍击水面时,迫使水下沉或从脚掌下流走,同时在脚掌的周围形成一个空气腔,这个动作产生了一个支撑力[7].这个支撑力足以在蜥蜴的脚掌向后扑水时,将蜥蜴的身体支撑在水面上,而腿向后划动又产生了使它能前进的力.

图2 仿生原型蜥蜴膝盖及脚踝轨迹图Fig.2 Trajectory graph of lizard'skneeand ankle
2 机器人单腿运动分析
本文将蜥蜴运动的录像转化成间断的图片,将图片按顺序排列好,蜥蜴在水上运动过程中头部与腰部的相对位置基本不变,故可将头部作为基准来标记其膝盖和脚踝的大致位置,绘制出其膝盖及脚踝的运动轨迹为椭圆形,如图2所示(小椭圆形:膝盖运动轨迹;大椭圆形:脚踝运动轨迹;竖线:蜥蜴小腿).本文采用曲柄摇杆机构作为机器人的单腿驱动机构,并通过ADAMS对单腿驱动机构进行运动仿真,得到脚掌处(D点)椭圆形的运动轨迹及运动速度曲线图,如图3、图4(杆1:曲柄,为原动件;杆2:摇杆;杆3:连杆).通过运动仿真可以得到,在设定机器人单腿驱动机构原动件杆1转速为360 r/m in时,杆3末端D点X轴最大速度约为0.913m/s,Y轴最大速度为0.9m/s,运动时间为0.2 s,此数据将为下节脚掌的计算流体力学分析提供基本计算数据.
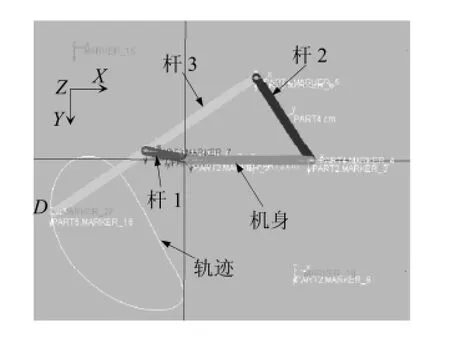
图3 机器人单腿驱动机构脚掌处运动轨迹Fig.3 Themoving track ofsingle leg'sdriving institutions in the foot
3 机器人脚掌设计及计算流体动力学分析
3.1 机器人脚掌设计
仿生原型蜥蜴脚掌并不是规则地、固定不动地一直做循环运动,而是随着肢体运动时刻在变化的,以此来提供动力和增加稳定性.由于重量及能源的限制,机器人在水上运动时脚掌的动作变化可以忽视.因此,结构简单的圆形和椭圆形刚体被用做机器人脚掌.机器人脚掌拍击水面必须产生大于自身重量的升力,才能保证机器人不会沉入水中,而脚掌尺寸越大,受到的升力越大,故机器人应采用相对较大尺寸的脚掌.
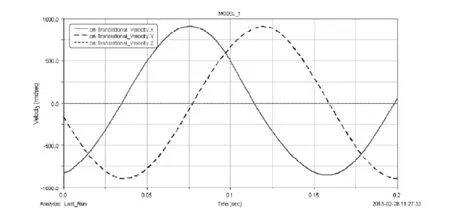
图4 机器人单腿驱动机构脚掌处运动速度曲线Fig.4 Speed curve of single leg'sdriving institutions in the foot
本研究工作已完成对相同面积的圆形脚掌和椭圆形脚掌的流体仿真分析,仿真结果表明椭圆形脚掌在水中的运动特性优于圆形脚掌,且椭圆形脚掌更接近于原型蜥蜴脚掌的形状.考虑文章篇幅有限,在此仅介绍椭圆形脚掌的流体动力学仿真分析.如图5所示,脚掌长轴为50mm,短轴为30mm,厚度为2mm.脚掌长轴沿机器人运动方向放置,由曲柄摇杆机构带动实现拍击、扑水和恢复3个运动过程,机器人脚掌与连杆之间为刚性连接,使用螺钉紧固,单腿整体模型如图6所示.
3.2 基于FLUENT的机器人脚掌计算流体动力学仿真分析
运用FLUENT软件对机器人脚掌进行流体力学仿真分析,通过上节运动仿真所得数据可知,单腿运动时末端D点Y轴(竖直方向)的最大速度为0.9m/s,机器人脚掌在最大速度时拍击水面产生的升力最大,故在此设定机器人脚掌以0.9m/s的速度拍击水面,并假设机器人脚掌在扑水时以水平姿态向后划水,设定机器人脚掌运动时间为0.2s.3.2.1机器人脚掌流体环境模型的建立
本文研究的实际模型为脚掌以一定的速度从空气进入水面的过程,求解脚掌运动过程中空气与水相互作用的各种状态.建立其仿真流体模型时,需要考虑水流入口与出口对脚掌的影响.为得到准确的结果,入口与出口边界必须位于脚掌高度10倍或更远的位置.脚掌尺寸为椭圆脚掌长轴50mm,短轴30mm,厚度为2mm.设计的流体几何模型的尺寸为600mm×600mm×132 mm(长×宽×高,单位mm).在GAMBIT中建立的计算模型如图7所示.
网格划分在GAMBIT中实现,采用四面体非结构化网格,如图8所示.网格生成后进行边界条件的设置,脚掌上方的平面设置成压力出口[8],脚掌及其他面设置成壁面[9].3.2.2动网格参数设置
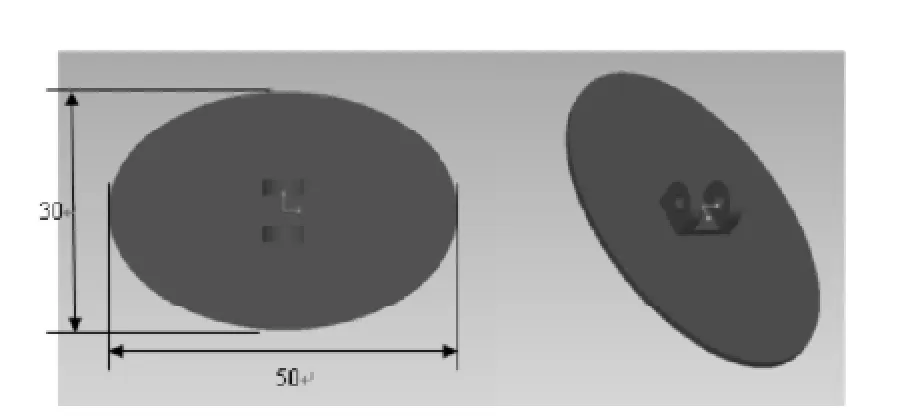
图5 椭圆形脚掌Fig.5 Theoval foot

图6 机器人单腿整体模型Fig.6 Theoverallmodelof robot's single leg

图7 机器人脚掌流体环境模型Fig.7 M odelof fluid environmentof robot's foot
应用动网格实现脚掌拍击、扑水和恢复整个运动过程.选择Smothing(弹簧光顺模型)作为网格更新模型,设置弹性系数为0.08,边界节点松弛因子为0.5,收敛容差为0.001,迭代次数为20.在局部网格重构选项中,本文将无论如何都采用新网格代替旧网格,故选择Must Improve Skewness(必须改善畸变率)选项,并激活Size Function(尺寸函数),Size Function Rate(尺寸函数变化率)设置为0.3,表示网格变化速率较慢,Size Function Variation(尺寸函数增量)同样设置为0.3.因脚掌的运动为刚体运动,故可以用边界型函数定义边界的运动方式.

图8 机器人脚掌流体环境模型网格划分Fig.8 Themeshing ofmodelof robot's foot in fluid environment
3.2.3 求解器的选择
当流动的物理量不随时间变化,为定常流动;反之称为非定常流动.本文所用的流体流动是非定常流动.根据流体雷诺数可判断是层流流动还是湍流流动.雷诺数是一种可用来表征流体流动情况的无量纲数,以Re表示,其计算公式为

水力半径的计算公式为

其中:A为非圆截面的过流断面面积;P为过流断面上流体与管壁接触的周长,称为湿周.
查表得20°水的粘度为1.009×103Pa s,为1 000 kg m3,管路截面长600mm,宽132mm.

计算得Re为3 500,由于临界雷诺数Recr=2 300,故流动为湍流.
本文选择非定常湍流模型作为计算模型,考虑到收敛性和收敛速度,采用压力基隐式求解器.本文中使用四面体非结构化网格进行网格划分,为了提高精度,在此选择二阶SIMPLE求解方式.松弛因子和算法的收敛速度与稳定性相关,不能过大或过小,过大虽然收敛比较快,但是稳定性差,过小收敛比较慢[10],本文采用默认设置.
3.2.4 仿真结果分析
图9所示为脚掌从空气进入水面所作拍击—扑水—恢复3个过程图,在0.1 s左右脚掌完成了向下拍击—扑水的运动,从图中可以看出脚掌形成的空气腔,而后进入恢复阶段,脚掌向上运动,划出水面,恢复的时间也为0.1 s左右,故可得到脚掌在水面上做拍击—扑水—恢复3个阶段所用的时间为0.2 s左右.随着脚掌从空气中拍击水面到最后扑水结束时可从图10看到所形成的在脚掌附近所形成的空气腔.

图9 脚掌运动过程图Fig.9 Themoving processdiagram of robot's foot
图11、图12所示为在z=300 mm平面上脚掌的速度云图与速度矢量图.可看出在脚掌扑水时形成漩涡的地方的颜色呈红黄色,图左侧的颜色普为由蓝到红速度依次递增,故在脚掌四周与漩涡附近的速度值偏大,在图12看出脚掌右侧形成了的箭头漩涡,此漩涡附近的箭头密度大且沿逆时针方向运动,与图11中的云图形式所显示的一致.仿真结果表明,机器人脚掌与仿生原型蜥蜴脚掌在扑水阶段都形成了漩涡.
在FLUENT软件中对脚掌流场计算完成后,生成报告显示脚掌受到的升力约为2.33 N.机器人脚掌所受升力对机器人单腿驱动机构原动件杆1旋转轴处的转矩,可作为今后电机选型的依据,样机的重量必须小于机器人单个脚掌所受的升力.
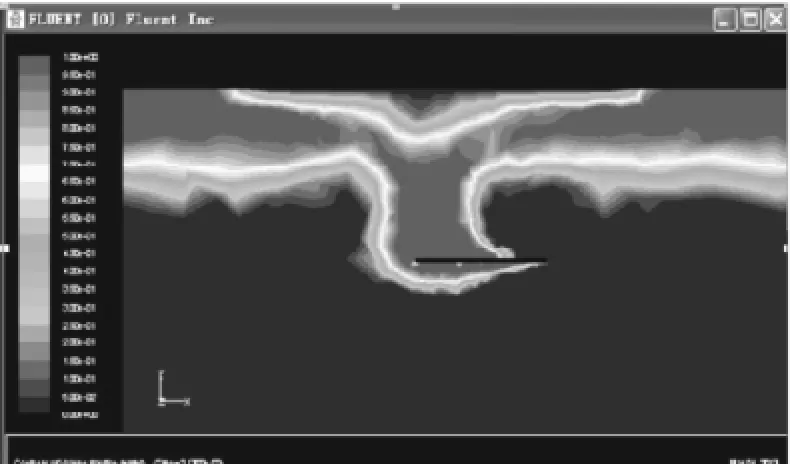
图10 脚掌拍击水面两相局部放大图Fig.10 The Partialenlarged figureof two phase forming when footslapswater

图11 z=300mm平面上脚掌的速度云图Fig.11 Thespeed cloud figure of foot in plane300mm of z
4 结论
本文在对蛇怪蜥蜴运动机理进行分析的基础上,利用ADAMS软件对机器人单腿驱动机构进行运动仿真,得到单腿驱动机构脚掌处的运动轨迹及运动速度曲线图;基于FLUENT软件动网格技术对机器人脚掌进行水环境下的仿真分析,结果表明机器人脚掌以给定速度进入水面时,脚掌周围形成空气腔,并能够在空气腔破裂前抬出水面.机器人脚掌所受升力对单腿驱动机构原动件杆1旋转轴处的转矩以及杆1的转速,可作为今后电机选型的依据,机器人样机的重量必须小于机器人单个脚掌所受升力.在对脚掌进行计算流体力学仿真分析时,实现机器人脚掌扑水姿态的旋转将会更加准确的模拟机器人脚掌在水中的运动过程,这将是今后的研究方向之一.
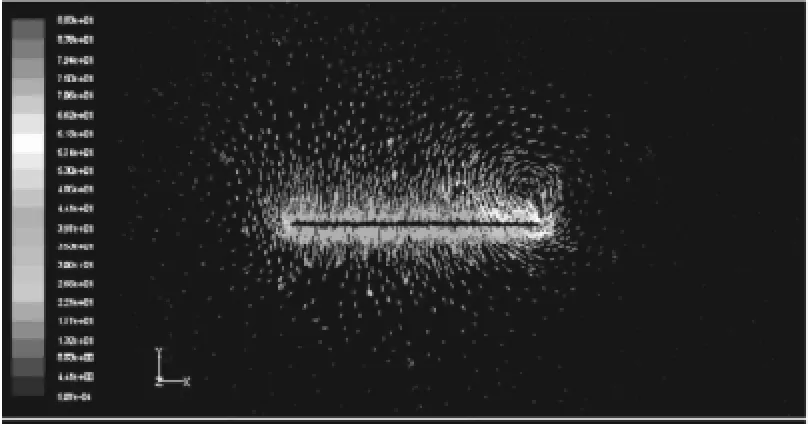
图12 z=300mm平面上脚掌拍击水面速度矢量图Fig.12 The velocity vector figureof footin plane 300mm of z
[1]Steven Floyd,Metin Sitti.Design and developmentof the liftingand propulsionmechanism forabiologically inspiredwater runner robot[J].IEEE TRANSACTIONSONROBOTICS,2008,24(3):698-709.
[2]Hyun Soo Park,Steven Floyd,Metin Sitti.Dynam ic modeling of a basilisk lizard inspired quadruped robot running on water[C]//IEEE/RSJ InternationalConferenceon IntelligentRobotsand Systems Acropolis Convention Center Nice,2008:3101-3107.
[3]高飞,吕建刚,张晓涛,等.模仿蛇怪蜥蜴的仿生推进装置结构研究[J].现代制造工程,2012(8):32-35,100.
[4]李冰,徐林森,汪小华,等.仿王蜥机器人驱动机构设计及动力学仿真[J].机械设计,2011,28(9):26-27.
[5]曹凯,徐林森,沈惠平,等.仿生双足水上行走机器人行走机构的运动学分析及参数化设计[J].机械设计与制造,2013(2):190-193.
[6]蔡舒文,饶进军,肖辅龙.仿蜥蜴水面机器人脚掌设计[J].机械设计与研究,2012,28(1):23-25.
[7]Hsieh S T,Lauder GV.Runningonwater∶Three-dimensional forcegeneration by basilisk lizards[J].NAS,2004,101(48):16784-16788.
[8]陈霞,王发展,王博,等.基于Fluent的三叶扭叶罗茨鼓风机内部流场数值分析[J].机械设计,2012,29(11):72-74.
[9]韩路辉,陈维山,刘军考,等.基于FLUENT的摆动尾鳍水动力特性研究[J].机械设计与制造,2010(5):204-206.
[10]李锐,侯友夫.基于Fluent动网格技术的乳化液泵分析[J].液压与气动,2011(8):35-37.
[责任编辑 杨屹]
The simulating analysisof faux lizard robot's foot by using fluidmechanics
GAOTie-hong1,GU Jia-peng1,ZHANG Yao-wei2,SHIKai1
(1.School of Mechanical Engineering,HebeiUniversity of Technology,Tianjin 300130,China;2.DepartmentofMechanical and Electrical Engineering,Shijiazhuang Information Engineering VocationalCollege,HebeiShijiazhuang 050035,China)
Faux lizard robotsimulates themovementway of lizard running on thewater.Themoving characterof its foot determ ineswhether the robotcan run on thewater.Based on theanalysisof the lizard'smovingmechanism,themodelof single leg's driving institutions and foot are built.Based on ADAMS software,the speed characteristic of foot into the w aterisanalysed.Basedon thedynam ic grid technology of computational fluid dynam icsanalysissoftware,themovement of the footin thew ater environmentisanalysed.The resultsshow that the robot's footcan slap thew aterw ith setting speed to form the air cavity,and itcan carry outof thew ater in frontof theair cavity burst.And itdraws thespeed of the robot's footinto thewater,moving timeand the force.Thestudywillprovidea theoreticalbasisforthemakingof robot'sprototype and themotorselection.
basilisk lizard;robot's foot;speed;dynamic grid;air cavity
TP24
A
1007-2373(2014)01-0035-05
2013-07-14
河北省自然科学基金(E2010000115)
高铁红(1961-),女(汉族),教授,博士,E-mail:gaotiehong111@163.com.
猜你喜欢
故事作文·低年级(2021年9期)2021-11-04
火力与指挥控制(2021年6期)2021-08-06
动漫星空(兴趣百科)(2020年10期)2020-10-26
小哥白尼·野生动物画报(2019年12期)2019-02-28
环球时报(2018-11-14)2018-11-14
知识经济·中国直销(2018年6期)2018-06-29
发明与创新·大科技(2017年7期)2017-07-17
创新作文(1-2年级)(2015年9期)2015-10-28
恋爱婚姻家庭(2015年36期)2015-09-22
祝您健康(1985年6期)1985-12-30
