
用气垫导轨验证系统机械能守恒定律
2014-06-28 00:45:28沈军
物理通报 2014年10期
沈 军
(南通大学附属中学 江苏 南通 226001)
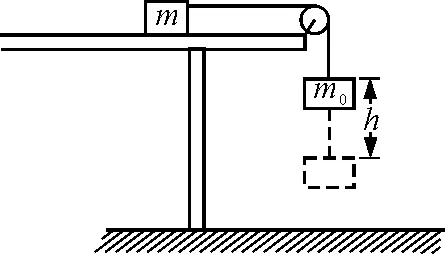
图1
以下是利用气垫导轨和光电门进行系统机械能守恒实验的过程,采用的器材有气垫导轨、光电门、数字计时器、垫高片、天平.
1 气垫导轨调节水平
实验中首先需要进行气垫导轨的水平调节.将气垫导轨放置在水平桌面上,安装好光电门,让两个光电门的距离相距40 cm,此距离即为后续计算中钩码下落的距离.打开气源,轻推滑块,如果滑块通过两个光电门的时间相同,则气垫导轨水平调节完成,在实际操作中,如果通过两个光电门的时间相差小于5%,就可以认为水平调节完成.
2 实验验证
水平调节完成后,用5 g的钩码拉动滑块,通过两个光电门后,数字计时器显示出滑块经过两个光电门的速度,输入Excel进行计算,结果如表1所示.

表1 数据记录 g=9.80 m/s2
从结果可以发现,不计入钩码的动能,误差在8.7%左右,如果计入钩码的动能,则误差在6.1%,符合实验要求.
3 问题讨论
但对于学生来说,仅从直观的数据看,有学生认为这个钩码的动能不计,也基本能证明守恒,数据的差值可能还是阻力的影响.此时,也可能会有学生提出,在探究加速度与力和质量关系的实验中,如果滑块的质量远大于钩码的质量,可以近似认为钩码的重力就是绳子上的拉力,那么,这个实验中,钩码的动能是否可以忽略呢?
4 再次验证
换用50 g的钩码,再次进行实验,数据如表2所示.

表2 实验数据 g=9.80 m/s2
从这组数据可以看出,如果不计入钩码的动能,则计算的偏差为24%,正确算法的结果误差为2.7%,符合实验要求.从这里可以让学生清楚地认识到系统机械能守恒不能缺少钩码的动能.
5 拓展研究
在前面实验的基础上,可以进一步把气垫导轨的一端垫高(垫高15 mm),这样滑块滑行时重力势能也会减小,而这部分势能往往也是学生容易遗漏的,实验数据如表3所示.
可以发现,如果不计入滑块减少的势能,偏差为43%,正确的结果误差为4.5%.这个实验进一步让学生发现自己对系统机械能守恒认识上的问题,从而让学生能够正确地认识系统机械能守恒的相关模型.

表3 实验数据 g=9.80 m/s2
6 结语
本实验利用的是实验室的基本仪器,采用Excel进行数据处理,实际教学中无需另加时间,利用正常教学时间,学生就可以直观地发现自己的问题所在,纠正错误.这样既让学生在有限的时间里动手动脑,又促进了对书本知识的巩固、掌握.
猜你喜欢
中小学实验与装备(2023年5期)2024-01-03 02:37:58
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:12
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:40
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:34
中学生数理化·八年级物理人教版(2022年6期)2022-06-05 06:55:30
初中生学习指导·中考版(2022年2期)2022-03-11 12:21:03
文理导航(2016年15期)2016-05-25 04:36:07
中小学实验与装备(2015年4期)2016-04-19 07:00:37
中国塑料(2015年9期)2015-10-14 01:12:35
河南科技(2015年2期)2015-02-27 14:20:28
