
基于外辐射源的多目标CMKF跟踪算法研究
2014-06-27 11:04乔梁
陕西科技大学学报 2014年1期
乔 梁
(广东金融学院 计算机系, 广东广州 510521)
0 引言
第二次世界大战前夕,世界上出现了第一部用于目标跟踪的雷达站,之后各种雷达和激光等目标跟踪系统相继得到发展并且日趋完善.然而,电子对抗技术的发展, 给以主动方式工作的雷达目标探测设置了重重障碍, 使其难以发挥威力.相对于雷达等有源探测, 无源定位系统具有隐蔽工作、截获概率高、实时性强等优势[1-5].在这种背景下, 以被动方式工作的无源探测技术得到迅速发展, 成为武器火控系统中对目标信息获取的一个重要组成部分.
传统的跟踪系统是一个探测器,仅连续地瞄准和跟踪一个目标.随着科学技术的进步和战略战术的发展,多目标跟踪的理论和方法愈来愈受到重视,并且已获得很大发展,成为当今国际上十分活跃的热门研究领域之一.
基于外辐射源的无源定位是一种利用民用电视台等普通民用频段通讯系统发射的电磁波作为照射源对目标进行定位的方法,它具有快速定位、抗低空突防等优点.
传统的无源定位方法主要有测时差定位法、测向定位法等.这些方法都是在直角坐标系中进行的.总的来说,这些方法定位精度对方向测量误差非常敏感,并且定位时间较长,精度较低.为了解决这些问题,有学者提出了采用极坐标利用角度和距离信息进行定位的方法.由于目标的位置测量是根据极坐标中距离和角度来完成的,卡尔曼滤波器不能直接处理这种非线性情况,因此需要将这种极坐标测量转换成实际应用的笛卡尔体系.根据国内外近年来研究的启示[6-10],本文提出了一种利用外辐射源空域和频域信息,采用转换测量卡尔曼滤波(CMKF)算法对多目标进行无源定位的方法.通过计算机仿真,验证了该方法的正确性与有效性.
1 多目标定位与跟踪的基本原理
多目标定位与跟踪基本原理方框图如图1所示.它由跟踪起始和跟踪终结、数据关联、跟踪门的形成等几个关键技术组成.
多目标定位与跟踪是一个递推过程.首先,来自观测站的测量数据被用于更新已经建立的目标航迹,数据进入系统后与各跟踪门进行关联, 再根据关联结果进行机动识别以及做下一步的滤波与预测.数据关联是多目标跟踪的核心部分,也是最重要和最困难的环节.它将当前一些或全部新的测量值与已建立的目标轨迹建立联系, 并且利用新的观测值去修正已有的估计结果, 给出下一个时刻的预测,最后确定最合理的行迹配对.机动识别和自适应滤波与预测用于估计各目标航迹的真实状态.
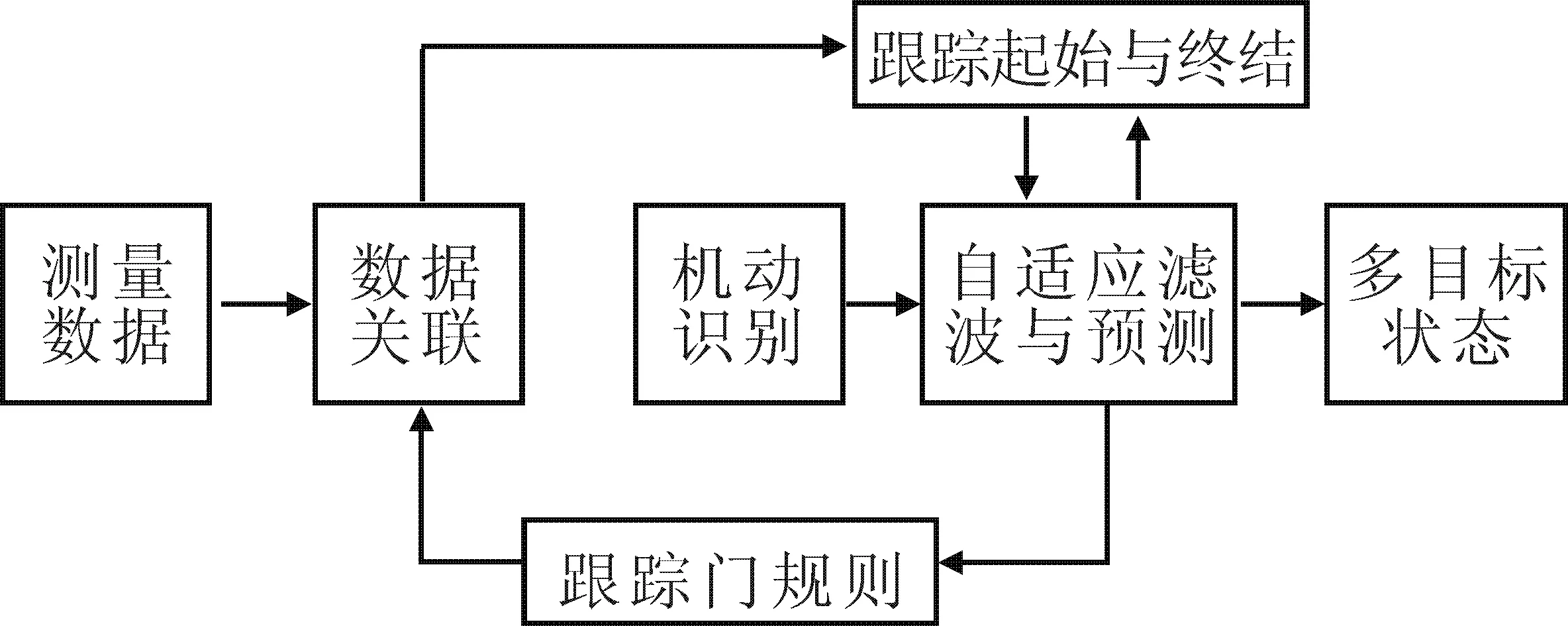
图1 多目标跟踪基本原理框图
跟踪门是跟踪空间中的一块子空间,被用来粗略确定行迹配对是否合理,其大小由接收正确回波的概率确定,中心位于被跟踪目标的预测位置.跟踪门规则是将观测回波分别分配给已建立的目标轨迹或新目标轨迹的一种粗检测方法,其目的主要是确定候选回波和建立新的假定轨迹,如果来自观测站的观测落入目标的跟踪门中,则称此观测为有效测量.不落入任一跟踪门的数据可能是新目标量测值, 须对其进行跟踪起动运算.
在跟踪空间中,那些与已建立的目标航迹不相关的测量数据可能来自杂波或潜在的新目标,由跟踪起始方法可以鉴别其真伪,并相应地建立新的目标航迹.跟踪起始包括假定轨迹形成、轨迹初始化、轨迹确认3个方面,是建立新的目标档案的决策方法.跟踪终结是跟踪起动的逆过程,它是清除多余目标档案的一种决策方法,当目标被摧毁或远离跟踪空间时,其状态更新质量将会下降.为减轻不必要的计算,可由跟踪终结方法做出相应的决策删除航迹,完成跟踪终结功能.最后,在新的测量数据到达之前,由接收正确观测的概论和目标预测状态确定下一时刻跟踪门的中心和大小,重新开始下一时刻的递推循环.
2 转换测量卡尔曼滤波CMKF算法
信源定位系统中,目标、外辐射源、探测接收器的几何关系如图2所示.

图2 目标、外辐射源、探测接收器的几何关系
这里采用了外辐射源的定位方式.为了进一步改进定位精度及收敛速度,考虑观测器在空间与目标之间存在着径向运动,将必然在观测平台上产生多普勒频移.因此把多普勒频率信息也加入到定位算法中.
系统的测量量为距离rb、多普勒频率rb、角度θ.系统的测量方程为:
式中


r=rb+L
目标到探测接收器的距离Rr可按照下式计算:
根据Rr和θ,测量可以被转换成笛卡尔坐标,
x=Rrsinθ
y=Rrcosθ
相应的协方差为:
式中
H1=sinθ(r2+L2-2rLcosβ)
H2=(r2-L2)(rcosθ-L(cosθcosβ-
sinθsinβ))=
(r2-L2)(rcosθ-Lcos(θ+β))
H4=cosθ(r2+L2-2rLcosβ)
H5=(r2-L2)(-rsinθ+L(sinθcosβ+
cosθsinβ))=
(r2-L2)(-rsinθ+Lsin(θ+β))
在探测器距离目标比较远和角度测量误差比较大的情况下,上述测量转换将会产生偏差,因此需要按照下式进行无偏转换:
那么转换测量方程为:
式中,wc是均值为0、协方差为∑c的转换测量噪声.
A=sinθ+sinγ
B=cosθ+cosγ
由于θ和γ的不确定性所引起的r中误差的方差可以近似为:
式中
那么,转换测量噪声的协方差为:
以上分析给出了测量方程,再根据目标的运动状态就可以确定状态方程,在此基础上利用卡尔曼滤波算法就可以计算出目标的运动状态.从而实现对目标的定位与跟踪.这就是(Converted Measurement Kalman Filter) CMKF算法的原理.
3 计算机仿真

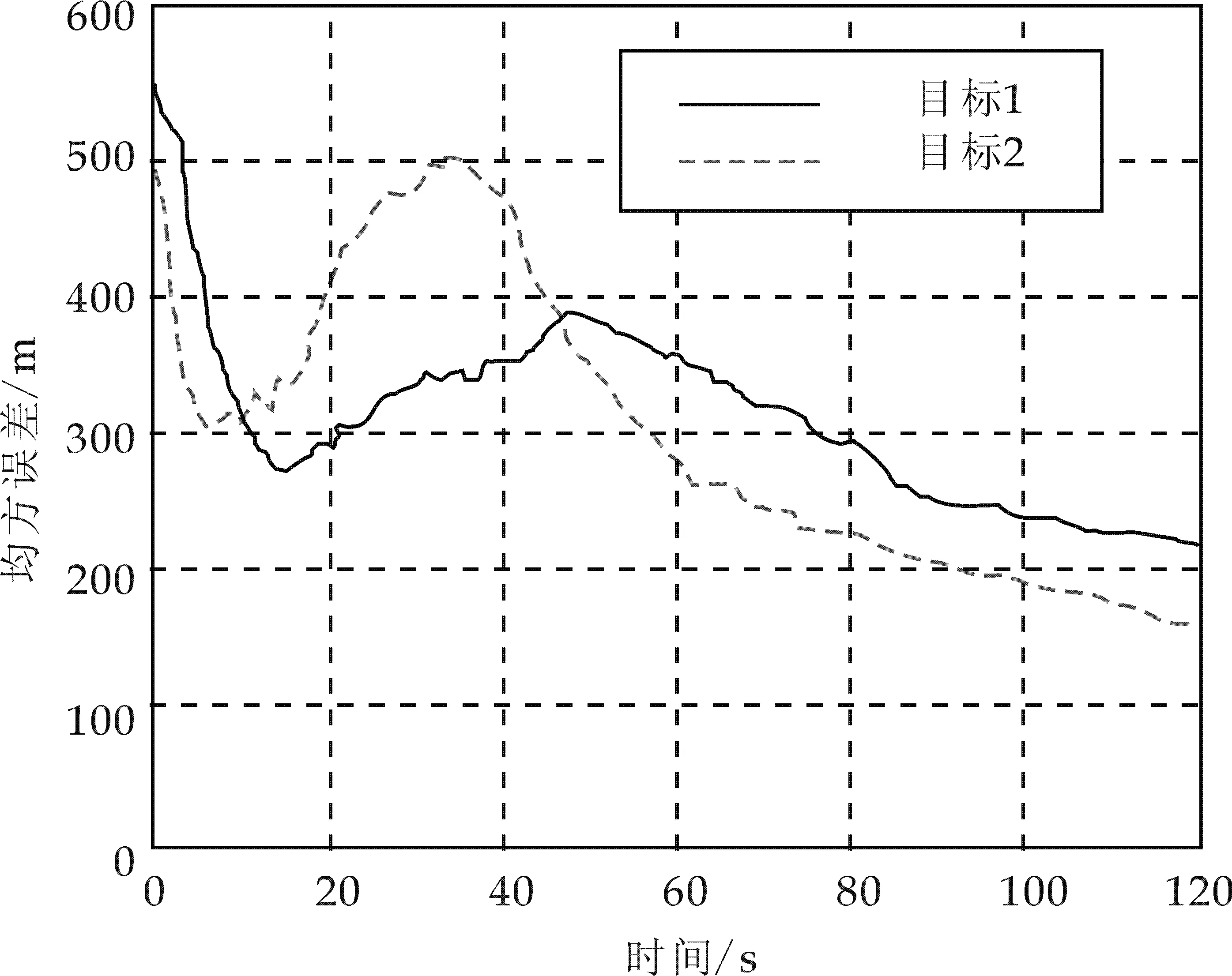
图3 CMKF算法的仿真结果
从实验结果中可以看出,CMKF算法无论在定位误差的精度和稳定性方面还是在收敛速度方面都得到了比较好的效果,实现了对两个运动目标的定位与跟踪.实验结果表明,对于多目标定位,CMKF算法是一个比较好的选择.
4 结束语
本文分析和研究了基于外辐射源的多目标CMKF跟踪算法,并进行了计算机仿真.理论分析和仿真结果表明这种方法具有较高的跟踪精度,切实可行.它拓宽了单站被动定位跟踪技术的应用范围,对于提高探测器在恶劣的电子环境下的生存能力具有一定的理论支持和实用价值.尽管本文的方法还存在着一定的局限性,在具体应用时,仍存在许多实际问题,但仍不失为一种好的定位手段.
[1] S W.Yeom,T.Kirubarajan,Y.Bar Shalom.Track segment association,fine-step IMM and initialization with doppler for improved track performance[J].IEEE Transactions on Aerospace and Electronic Systems,2004,40(1):293-309.
[2] 孙 阳,徐 征.一种新的三维纯角度无偏定位跟踪算法[J].电子设计工程,2011,19(18):81-85.
[3] 潘丽娜.红外警戒系统中的数据互联算法[J].红外与激光工程,1998,27(6):5-7.
[4] 曲长文,徐 征.一种新的基于角度和时差的稳健定位跟踪算法[J].信息处理,2011,27(2):230-236.
[5] 龚享铱,周良柱.一种变换状态空间的稳定卡尔曼滤波算法[J].电子与信息学报,2005,27(6):896-899.
[6] 周 正,苏 峰,关 欣.一种新的两站多目标无源定位与跟踪模型[J].四川兵工学,2012,33(2):73-76.
[7] 华铁洲,李冬海,胡德秀.改进的单站无源定位方法[J].计算机应用,2010,30(1):27-30.
[8] 万 方,丁建江,陈昌孝.固定单站无源定位与跟踪方法应用[J].活力与指挥控制,2011,36(7):61-64.
[9] 周 振, 王更辰.机载单站对机动目标无源定位与跟踪[J].电光与控制,2008,15(3):60-63.
[10] 陆志宏.舰载电子战系统中对运动辐射源的单站无源测距定位技术[J].舰船电子对抗,2007,30(2):16-19.
猜你喜欢
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10
加油站服务指南(2021年7期)2021-10-14
雷达与对抗(2021年4期)2021-03-18
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年12期)2019-07-16
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年6期)2017-11-23
雷达学报(2017年1期)2017-05-17
互联网天地(2016年2期)2016-05-04
