
基于模糊次优控制的空气悬架仿真研究
2014-06-27 05:46孙世磊詹长书陈开来狄佳福
重庆理工大学学报(自然科学) 2014年7期
孙世磊,詹长书,陈开来,狄佳福
(东北林业大学交通学院,哈尔滨 150040)
基于模糊次优控制的空气悬架仿真研究
孙世磊,詹长书,陈开来,狄佳福
(东北林业大学交通学院,哈尔滨 150040)
针对空气弹簧的非线性特性,建立了空气弹簧关于气囊压力、有效面积、有效容积、垂向变形的弹力模型。采用多变量反馈机制,改进了次优控制理论,使之能够应用到空气悬架中。提出一种用于空气弹簧悬架的模糊控制与次优控制相结合的控制策略,并基于空气弹簧的非线性特性建立了单轮1/4车辆振动模型。同时,利用Matlab/Simulink建立了空气悬架和模糊次优控制器模型。仿真结果表明:针对非线性空气悬架所设计的控制器显著地改善了车辆平顺性与道路友好性。
空气悬架;次优控制;模糊控制;平顺性;道路友好性
悬架系统是汽车的重要组成部分之一,悬架对于汽车的行驶平顺性能起着至关重要的作用。在车辆负载相同时,空气弹簧比普通弹簧的振动频率更低[1],能够有效地提高车辆的行驶平顺性。
空气悬架系统是一个典型的非线性系统,然而近年来仍有许多研究者将其简化为线性弹簧进行研究。本文建立了与气囊压力、有效面积等因素有关的非线性弹簧模型,基于空气弹簧的非线性特性建立了单轮1/4车辆动力学模型。在控制算法上,单纯的模糊控制主观性较强[1-2];神经网络控制需要大量的数据进行训练[3];传统的PID控制对非线性的复杂的系统无法获得理想的效果[4,8];模糊PID控制的初始PID参数需要反复整定[5]。
模糊控制具有适应能力强且灵活的特点,次优控制具有多变量反馈且结构简单、调整方便的特点。本文以膜式空气弹簧为试验对象,得到空气弹簧的动态特性曲线。针对空气悬架的非线性特性,综合考虑模糊与次优控制的特点设计了模糊次优联合型控制器,并评价了控制器对空气悬架系统的平顺性与道路友好性。
1 空气悬架模型的建立
1.1 膜式空气弹簧模型
空气弹簧的绝对弹力可以近似表示为

式(1)中:p表示空气弹簧内有效压力;A表示空气弹簧内有效截面积。
p通常与气囊内初始压力、气囊容积等因素有关。在任意状态下,空气弹簧内有效压力可表示为

式(2)中:p0,pa分别表示气囊内初始压力和大气压力;V,V0表示气囊内容积和初始容积。
工程上,将气囊的容积和有效面积简化成随气囊垂向变形线性变化的量[4]:

式(3)、(4)中:A0表示空气弹簧内初始有效截面积;α,β分别表示气囊内有效容积变化率和有效面积变化率;x表示空气弹簧高度变化量。
由式(1)~(4)可得空气弹簧力为

根据现有的试验条件,按照空气弹簧试验特性国家标准(GB/T13061—1991)进行试验,以E7074型膜式空气弹簧为试验对象,得到空气弹簧的动态特性曲线,如图1所示。
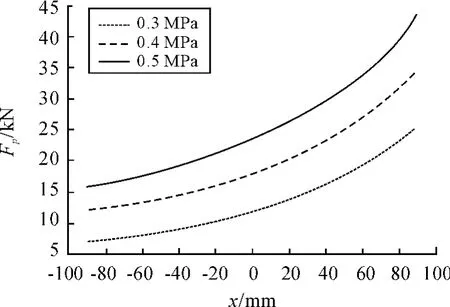
图1 空气弹簧x-F刚度特性曲线
分析在车辆满载时,弹簧内部初始压力p0= 0.4 MPa下的弹簧变形与刚度特性。当空气弹簧处于拉伸状态时弹簧刚度变化量较小;反之,变化较大。弹簧压缩变形量为正,拉伸变形量为负。当弹簧压缩量>0.02 m时,弹簧刚度迅速增大。悬架弹簧在静平衡位置时的刚度 kb=182 000 N/m。
1.2 单轮1/4车辆模型
空气弹簧悬架系统是一个非线性的复杂系统,很难建立精确的模型,故可根据需要和实际情况进行适当简化。将空气悬架系统简化为空气弹簧和减震器[5]。对于没有附加气室的空气弹簧,可将减震器的阻尼系数视为定常值。简化模型如图2所示。
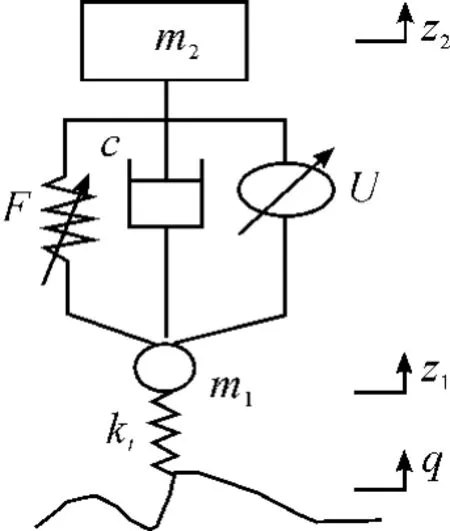
图2 1/4空气悬架简化模型
根据牛顿定律,可得空气悬架系统的力学方程:

式(6)中:m1,m2分别为车辆轮胎质量和车身质量;c为悬架阻尼系数;kt为轮胎刚度系数;空气弹簧相对弹力ΔF=F-m2g;z1,z2,q分别为车轮垂向位移、车身垂向位移和路面输入位移;U为弹簧气压变化引起的弹簧弹力变化量。悬架的具体参数值见表1。

表1 空气悬架仿真参数
2 道路友好性的评价指标
道路友好性可以描述为车辆对路面破坏能力的大小,破坏能力越大,友好性越差。其评价指标主要有轮胎动载荷系数(DLC)、动态载荷应力因子(DLSF)和95百分位4次幂和力。
轮胎动载荷系数(DLC)可以定义为[7]

式(7)中:CDLC为轮胎动载荷系数;σ为车轮动载荷标准偏差;G为车轮静载荷。
动态载荷应力因子(DLSF)是Hedrick在研究DLC的基础上提出的[7],可以定义为

式(8)中CDLSF为动态载荷应力因子。
3 联合控制器的设计
针对空气悬架,分别设计了次优控制、模糊控制、模糊次优控制算法对其进行控制。半主动空气悬架是利用簧载质量的速度信号作为反馈信号调节悬架的刚度(或减振器阻尼),从而提高车辆的乘坐舒适性与平顺性。
3.1 模糊控制器
模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种非线性智能控制,适用于较难建立精确数学模型的系统,是根据经验设计模糊规则进行推理的控制算法。模糊控制器的设计主要包括输入输出变量的定义、隶属函数的选择、模糊规则表的建立及解模糊化[8-10]。本文以车身加速度为控制目标,选取车辆垂向速度(E)、车身垂向加速度(EC)作为输入信号。控制器输出为气囊压力改变产生的力U。根据所选取的路面激励和车辆速度,选取输入输出的物理论域分别为[-1,1],[-20,20],[-3 375,3 375],相应的模糊论域分别为[-3,3],[-3,3],[-4.5,4.5]。量化因子和比例因子分别为3,3/ 20,750。隶属函数选择三角形隶属函数,区间边界处分别选取Z型与S型隶属函数。
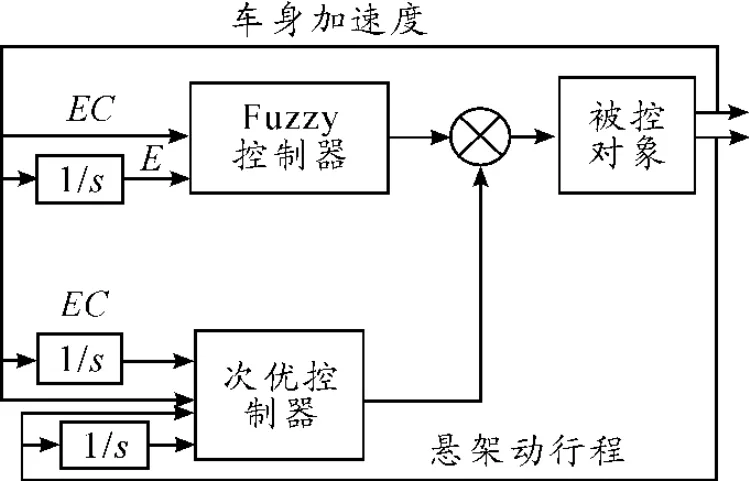
图3 模糊次优联合型控制器原理框图
输入输出模糊变量的模糊子集划分为{负大,负中,负小,零,正小,正中,正大}={NB,NM,NS,ZR,PS,PM,PB}。模糊规则的设计原则是尽量降低车身垂向加速度。模糊规则见表2。

表2 模糊规则表
3.2 次优控制器
次优控制策略是由Thompson针对并置式和独立式主动悬架提出的。给定性能指标为
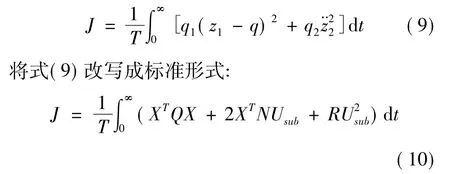
由式(10)可求得加权半正定矩阵Q、控制力的加权矩阵R、交叉项矩阵N。
由于空气弹簧力F=pA,无法将其变换成状态空间的形式,故将F近似表示成普通弹簧力ΔF=k(z2-z1),其中k为弹簧的静刚度。令状态变量x1=z1-q,x2=z2-z1,x3=˙z1,x4=˙z2,x5=q,则状态空间表达式为

利用 Matlab中的黎卡提方程[5]求解函数lqr(),其格式为[K,P,E]=LQR(A,B,Q,R,N),其中A,B,Q,R,N为输入矩阵。可求得最优反馈控制矩阵K=[k1,k2,k3,k4,k5]。
在次优控制律中

式(12)中:ka=(1+k/k2)m2,kv=(1-k/m2)· (k3+k4),ka,kv分别称为加速度、速度反馈系数。由于车辆在坏路面行驶时,弹簧刚度变化范围较大,所以通过将K作为加权系数进行调整使悬架性能得到优化。
3.3 联合控制器模型
将次优控制器与模糊控制器并联得到联合型Fuzzy-次优控制器模型。次优控制器以多变量反馈为基础,其输入为悬架动行程、车身垂向速度及其变化率,二维模糊控制器输入分别为车身垂向速度和垂向加速度。控制器的输出为气囊压力变化所产生的力。
4 仿真及结果分析
4.1 平顺性分析
进行仿真时,路面激励采用滤波白噪声的方法[6]。选取B级路面δ=0.130 3 m-1,将路面白噪声(band-limited white noise)的功率调整为0.01。为保证结果的稳定性,选取仿真时间为30 s。分别得到次优控制、模糊控制和联合控制的3种平顺性指标均值,如表3所示。次优控制能有效改善空气悬架的车身加速度、轮胎动载荷和悬架动行程。模糊控制对空气悬架的车身加速度和轮胎动载荷也有一定的改善,但对悬架动行程的改善效果不明显,其效果次于次优控制。联合型控制方法对车辆平顺性的3个评价指标均优于单纯的模糊和次优控制,整体性能最优。

表3 平顺性能对比
为了明确表现联合控制与被动控制控制悬架平顺性性能的差异,绘制时间区间[0,5]的悬架垂向加速度、轮胎动载荷、悬架动行程曲线,如图4~6所示。曲线表明:联合型控制空气悬架在整体上能有效降低车身的垂向加速度峰值,使乘坐舒适性明显提高,对轮胎动载荷、悬架动行程也有显著的改善作用;但在局部对悬架的性能有一定的破坏作用。

图4 悬架垂直加速度仿真曲线

图5 悬架轮胎动载荷仿真曲线

图6 悬架动行程仿真曲线
4.2 道路友好性分析
在B级路面激励条件下,计算得到3种不同车速下DLC和DLSF的均方根值,如表4所示。在相同的车速下,采用模糊次优联合控制的空气悬架DLC和DLSF的改善率显著提高。随着车速的增加,DLSF逐渐减小。在一定的车速变化范围内,联合控制空气悬架的DLSF显著减小,道路友好性明显改善。

表4 道路友好性能对比
5 结论
1)当空气弹簧处于拉伸状态时,弹簧刚度变化量较小;反之,变化较大。当弹簧压缩量>0.02 m时,弹簧刚度迅速增大。
2)联合型控制方法对车辆平顺性的3个评价指标均优于单纯的模糊和次优控制,整体性能最优。
3)模糊次优联合控制的空气悬架对道路的破坏程度明显降低,道路友好性能更优。
[1] 赵丽梅.半主动空气悬架模糊控制的仿真研究[J].汽车科技,2010(21):58-60.
[2] 刘晓辉.半主动空气悬架系统的模糊控制[J].科技情报开发与经济,2011,21:167-169.
[3] 王辉,朱思洪.半主动空气悬架神经网络的自适应控制[J].农业机械学报,2006(1):28-31.
[4] Zhengchao Xie,Pak Kin Wong,Jing Zhao,et al.A Noise-Insensitive Semi-Active Air Suspension for Heavy-Duty Vehicles with an Integrated Fuzzy-Wheelbase Preview Control[J].Mathematical Problems in Engineering,2013(2):121953.
[5] 陈蓉蓉,陈龙,聂佳梅,等.汽车空气悬架联合型模糊PID控制[J].机械设计与制造,2011(11):165-167.
[6] CHEN Yi-kai,HE Jie,King M.Comparison of two suspension control strategies for multi-axle heavy truck[J].Journal of Central South University,2013(20):550-562.
[7] Hedrick J K,Yi K.The Effect of Alternative Heavy Truck Suspension Flexible Pavement Response[R].Berke ley: University of California,1991.
[8] 詹长书,孙世磊.基于LQG理论的电子控制空气悬架控制策略研究[J].森林工程,2014,30(3):87-90.
[9] 喻清舟,刘静静,蔡挺,等.基于PID控制的电控空气悬架系统设计[J].湖北汽车工业学院学报,2008(4): 75-78.
[10]刘金琨.智能控制[M].北京:电子工业出版社,2005.
(责任编辑 刘 舸)
Air Suspension Based on Hybrid Fuzzy-Suboptimal Control Strategy
SUN Shi-lei,ZHAN Chang-shu,CHEN Kai-lai,DI Jia-fu
(Transportation College,Northeast Forestry University,Harbin 150040,China)
For non-linear air spring,air spring of elastic model is established with respect to cuff pressure,the effective area,the effective volume and vertical deformation.Suboptimal control theory was improved,so that it can be applied to air suspension.Moreover,combining control strategy of fuzzy control and sub-optimal control for air spring suspension is proposed.The model of quarter vehicle dynamic based on the nonlinear characteristics of the air spring is established.Meanwhile,modeling of air suspension and fuzzy-suboptimal is established using Matlab/simulink software.Simulation results show that the designed non-linear air suspension controller significantly improves the vehicle ride comfort and road friendliness.
air suspension;suboptimal control;fuzzy control;ride;road friendliness
U463
A
1674-8425(2014)07-0021-05
10.3969/j.issn.1674-8425(z).2014.07.005
2014-03-24
国家博士后科学基金资助项目(2013M541329);中央高校基本科研业务费专项资金资助项目(2572014BB08)
孙世磊(1989—),男,硕士研究生,主要从事汽车节能减排技术研究;詹长书(1970—),男,博士,副教授,主要从事汽车节能减排技术的研究。
孙世磊,詹长书,陈开来,等.基于模糊次优控制的空气悬架仿真研究[J].重庆理工大学学报:自然科学版,2014(7):21-25.
format:SUN Shi-lei,ZHAN Chang-shu,CHEN Kai-lai,et al.Air Suspension Based on Hybrid Fuzzy-Suboptimal Control Strategy[J].Journal of Chongqing University of Technology:Natural Science,2014(7):21-25.
猜你喜欢
装备制造技术(2020年2期)2020-12-14
今日农业(2019年12期)2019-08-15
中国汽车界(2016年1期)2016-07-18
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
学苑创造·C版(2015年9期)2015-11-26
当代畜禽养殖业(2014年9期)2014-02-27
